基于机械理论的膝关节假肢设计
2021-11-02 04:59:18曲立东
探索科学(学术版) 2021年9期
曲立东
四川省康复辅具技术服务中心 四川 成都 610042
设计背景
科学技术的进步极大的便利了人们的生活,假肢的出现逐渐取代了拐杖,这对于假肢应用者来说,不仅可以在外观上弥补其缺陷,也可以使截肢者可以和正常人一样工作、生活,扩大了残疾人参与社会活动的范围,增强其自信心,减少因身体缺陷带来的不便利。膝关节作为大腿假肢部分的核心部件,在人类活动的过程中发挥着重要的支撑作用,并且膝关节的性能在一定程度上决定了人类活动范围的大小和敏捷性的高低,对假肢的逼真程度也起着关键性作用。[3]从目前情况来看,市场上的膝关节的屈伸都是由残肢带动的,不具有自主性、能动性,只能通过调节假肢关节处的阻尼力矩使得假肢的侧步态和健肢侧步态接近。一般情况下,普通的假肢膝关节在安装的过程中以截肢者的体重、行走惯性为依据对阻尼力矩进行调节,当截肢者的走路速度变快或者变慢时,步态对称性情况就会更差一些。
在上世纪90年代,假肢运动不以截肢者走路速度的变化而变化,稳定性的情况也较差,随着科学技术和人类文明的进步,假肢技术也得到了提高,许多智能型的假肢膝关节出现,这为广大截肢者带来了福音,智能型的假肢膝关节可以对截肢者进行步态的实时控制,根据情况的动态变化随时作出调整,如国内的中南大学的CIP-ILeg,国外的日本的Nabco等。我们国家对假肢的智能性研究与国外相比起步较晚,这也说明我们的基础较为薄弱,比发达国家落后了二十几年,目前我国仍处于研究、探索阶段,为了在机械理论的基础上对膝关节的假肢作进一步的研究,有必要对假肢的步态变化和智能控制相结合进行研究。
一、设计方法
(一)以机械理论为基础对假肢膝关节的机构进行选型
符合假肢膝关节设计的机构有很多,我们首先要做的就是选择适合假肢膝关节的机构类型,[1]其中制造成本较低的就是四连杆机构,其可靠性也很高,可以实现瞬心轨迹为理想的J型曲线的要求,所以四连杆作为理想的机构之一。
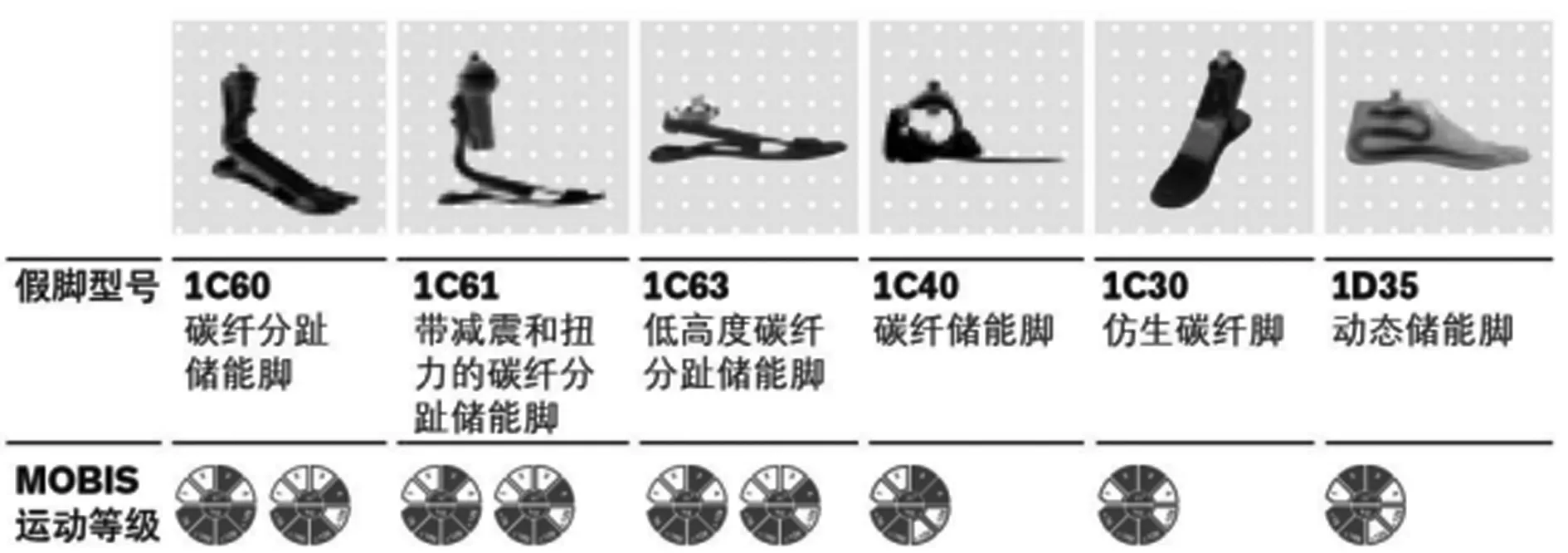
图1 假体关节类型
(二)对机构运动进行深入分析
基于力学理论的膝关节假体设计是膝关节假体机构的动态设计,以灵活性、体积和效率为基础,进一步满足步行、上下楼梯、跑步等多种形式,最终达到接近人体动力学的目的。为了满足残疾人的各种需求,需要将上述四连杆机构与电机结合起来,利用直线电机的特性为下肢运动提供动力,从而代替小腿肌肉。传动杆长度的变化可以带动连接杆运动,为四连杆运动提供动力来源,但这些运动都以电机旋转为基础。与连接杆相连的为主动杆,其余均为被动杆,与小腿连接的有一个被动杆。
在正常步态的支撑期,四连杆的结构提供了更强的稳定性,四连杆运动在这个时期的主要来源是电机旋转带动传动杆的长度变化。主杆运动是连接杆和四连杆的运动,,其带动了从动杆运动,为连接轴提供转矩从而实现膝关节的弯曲,当膝关节伸展时,需要电机的反向旋转,其过程与上述过程一致。
(三)对膝关节的变化信息进行采集
此设计针对的是膝关节的设计,因此对膝关节进行动态信息的采集是很重要的一步。通过收集膝关节在跑步、走路和爬楼梯等不同情况下的运动信息,可以得出被动和半主动膝关节在残疾人的主动性方面存在很大缺陷,很难主动爬楼梯和爬坡,所以我们产品的目的是研究主动膝关节假体。
首先,我们可以利用维康光学运动捕捉系统采集正常人运动时的膝关节。当这个系统的摄像头发出的红点反射到光球表面时,光球也会向摄像头反射同样长的红光,这样整个运动轨迹就可以被清晰的记录下来,最后通过系统的软件进行处理,最终得到所需的运动数据。这个系统有两个测力平台,可以测量行走过程中的阻力。也叫反作用力,通过将这些原始数据导入到名为polygon的系统中,我们可以检测膝关节、踝关节等关节的角度、力的大小、行走过程中地面的反作用力等影响因素。脚后跟开始着地时要记住完整的步态,可以分为支撑期和摆动期,其中前半段占很大比重。[2]在膝关节的假肢设计过程中要尽量做到有较强的真实性,和天然的肢体有很强的相似性,可用三维动态进行仿真,此仿真系统可靠性强,并且成本低,可以为消费者节约成本。在整个仿真环境中要建立动力型的假肢膝关节的样品。即所谓的试点工作,研究样本,为这些模拟动作建立相应的仿真平台,利用cosmotion等相关软件分析膝关节的动态运动,比较不同速度和动作下的膝关节,从而提高肢体残疾人的舒适度和体验。
(四)膝关节位置控制的具体操作
1)选择四连杆机构
2)利用维康的光学动作捕捉系统,首先对十个人进行试验。要求这十个人没有身体上的缺陷,将十个人分成两组,分别进行平地行走、跑步、上下楼梯、坐下起立这四种运动模式的试验,对其运动信息进行采集。将采集后的信息利用维康软件进行校正,确定测试的区域和测试过程中存在的问题;接下来对实验者的下肢进行反光标记,建立静态模型;最后对整个过程进行讲解,要求实验者在此过程中要掌握动作要领,明确开始位置和最终结束位置;实验者在进行四种运动模式时,要以不同的速度进行,分别是快速、中速、慢速,每种速度要测试出十组数据,确保数据的真实可靠性。
3)以机械理论为基础建立假肢膝关节控制模型,最终确定两相混合式步进电机作为动力来源,计算出电机的脉冲变化规律对膝关节假肢进行控制。[5]这其中也需要FSM的数学原理,即有限状态自动,是一种数学模型,对有限个状态和状态之间的转移进行数学上的分析。
4)采用迭代学习控制(ILC)的方法,研究了单个周期的步态的调节方法,并做出了理论分析曲线。对步态变换时两种不理想情况即过早、不及时给出一定的解决方法,根据周期比例对求出运动速度,避免速度过快或者过慢情况的出现
5)影响膝关节假肢运动的各影响要素之间具有关联性,不是孤立的。
二、最终得出结论
本文利用三维人体采集系统采集人体的四种运动形式,[4]分析膝关节的运动和所需能力,通过cosmotion等软件进一步研究膝关节假体的动态类型,以力学理论为主要依据和理论来源,用相机记录健康人体的下肢运动。正常人的亲身实践作为膝关节假肢安装的重要支撑之一,最后通过对原始数据进行处理,计算出膝关节在不同运动模式下的不同形态以及运动强度的大小,探索出一定的运动规律。根据机械理论,建立假肢膝关节控制模型,确定两相混合式步进电机作为动力来源,计算出电机的脉冲变化规律对膝关节假肢进行控制。

图2 膝关节结构
三、结语
膝关节是人类身体活动的重要部位,对人体的活动起着关键性作用,但是由于技术的局限性,目前的膝关节假肢不能较好的满足肢体残疾者的要求,因此在机械理论的基础上对膝关节处假肢进行全动力型研究是我们需要研究的问题,可以让肢体残疾者较好的进行日常生活中的自理活动,在外观上与常人无较大差距,提高自主活动。
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
疯狂英语·新读写(2022年5期)2022-11-22 12:28:26
中外文摘(2020年19期)2020-10-31 12:51:08
家庭医学(下半月)(2020年7期)2020-08-24 07:46:54
中国生殖健康(2019年3期)2019-02-01 06:12:34
电子制作(2018年18期)2018-11-14 01:48:04
意林·全彩Color(2018年7期)2018-08-13 09:35:14
自动化学报(2018年6期)2018-07-23 02:55:42
爆笑show(2015年4期)2015-06-24 07:35:57
中国康复理论与实践(2015年7期)2015-05-09 08:31:38