
双电机混合动力汽车工作模式控制分析
2021-11-02 09:02于长虹伍庆龙
汽车文摘 2021年11期
于长虹 伍庆龙
(1.中国第一汽车股份有限公司新能源开发院,长春 130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春 130013)
主题词:双电机 混合动力汽车 工作模式 控制分析
Abbreviation
BMS Battery Management System
BSFC Brake Specific Fuel consumption
CAN Controller Area Network
EMS Engine Management System
HCU Hybrid Control Unit
HEV Hybrid Electric Vehicle
HV High Voltage
HVAC Heating,Ventilation and Air Conditioning
ISG Integrated Starter Generator
MCU Motor Control Unit
SOC State Of Charge
TCU Transmission Control Unit
TM Traction Motor
1 Introduction
With the continuous improvement of the national strate⁃gic position of new energy vehicles,the application fields of HEV are widely expanded[1].In order to effectively re⁃duce vehicle fuel consumption and exhaust emissions,more and more automobile manufacturers vigorously pro⁃mote the researches and developments for HEVs[2].HEV is a kind of vehicle that gets power from at least two kinds of stored energy,such as electric energy and fuel.Compared with the traditional vehicle which only uses fu⁃el to drive the engine,HEV has different running opera⁃tion modes due to the newly increased motor and HV bat⁃tery[3].And there are much more complex control strate⁃giesand algorithmsin hybrid electric vehicles[4-5].
There are three different kinds of hybrid electric ve⁃hicles,including series hybrid vehicles,parallel hybrid vehicles and series-parallel combined HEVs.The differ⁃ent operation modes can be designed for HEV,because of theparticularity of powertrain system[6-7],and thediffer⁃ent driving situations are developed and displayed on the instrument cluster[8].The hybrid electric vehicles with dual-motor dynamic system have a lot of characteristics,and the different control strategies of operation modes are developed[9].Through the effective and reasonable con⁃trol methods are applied in dual-motor dynamic system,the vehicle power performance can be improved,and the vehicle fuel consumption and emission can also be re⁃duced[10].
2 Dual-motor Dynamic System Structure
The dual-motor dynamic system of hybrid electric vehi⁃cle is mainly composed of engine,TM motor,ISG motor,inverter,coupling mechanism,clutch,HV battery,differ⁃ential mechanism,and drive shaft.The dual-motor dy⁃namic systemstructureisshown in Figure 1.

Fig.1 Thedual-motor dynamic system structure
TM motor is connected with the driving front wheel through the coupling mechanism,which is used to drive the vehicle.ISG motor is connected with the engine,which is mainly used for power generation.ISG motor can also be used to start the engine and charge the bat⁃tery in recovery energy mode.The crankshaft output end of the engine is connected with the clutch,and the clutch is connected with the input shaft of the coupling mecha⁃nism.The coupling mechanism adopts a dual input shaft design,which is respectively connected with TM motor and the clutch.TM motor can drive the vehicle alone or jointly with the engine and ISGmotor.HV battery is con⁃nected with TMmotor and ISGmotor through theintegrat⁃ed inverter.
3 Operation Modes Classification and Control
Based on the driver’s torque demand,HV battery SOC,accelerator pedal,brake pedal and other factors,hybrid electric vehicle can be designed and controlled to enter different operation modes.The running states of HEV canbe divided into different operation modes according to the established control strategies,and different opera⁃tion modes can realize different vehicle functions.Final⁃ly,these control strategies can make the hybrid electric vehicle run to achieve the result of high efficiency and energy-saving.
The dual-motor dynamic control system is estab⁃lished in order to make hybrid electric vehicle complete different operation modes switching.The dynamic control system is composed of different controllers,including HCU,EMS,MCU1,MCU2 and BMS.HCU is the core controller to coordinate and control the effective driving of hybrid electric vehicles.EMS is used to control en⁃gine.MCU1 is the controller of TM motor and MCU2 is the controller of ISG motor.These controllers communi⁃cate with each other through CAN network,and the con⁃trol strategy isset in thecontrollers.
In the vehicle driving process,the operation mode control strategy is executed according to the current sig⁃nal state.The controllers receive many signals in order to achieve the accurate control and switching of operation modes.The operation modes of dual-motor hybrid elec⁃tric vehicle include:pure electric mode,series mode,en⁃gine direct drive mode,parallel mode,charge mode,ener⁃gy recovery modeand enginestart mode.
4 Pure Electric Mode
4.1 Pure Electric Creep Mode
When all of the following conditions are met,the dualmotor dynamic system drives the vehicle with the pure electric creep mode.(1)The vehicle speed is 0 km/h.(2)The shifter position is in D or R gear.(3)HV batterySOCis greater than the threshold value(for example,SOCval⁃ue>35%).(4)The parking brake state is not activated.(5)The brake pedal is not pressed.(6)The accelerator pedal isnot pressed.
In the pure electric creep mode,HCU cooperates with MCU to control TM motor to output torque in order to maintain the vehicle crawling at a certain speed which is below 10km/h.In this mode,the status of each assem⁃bly is controlled as follows:engine shutdown,TM motor drive,ISG motor shutdown,clutch separation and HV battery discharge.
4.2 Pure Electric Drive Mode
The dual-motor dynamic system drives the vehicle with the pure electric drive mode if all of the following condi⁃tions are all met.(1)The vehicle speed is between 0 and 10 km/h.(2)The shifter position is in D or R gear.(3)TheSOCof HV battery is greater than the threshold value(for example,SOCvalue>35%).(4)The brake pedal isnot pressed.(5)The accelerator pedal is pressed.(6)There is no demand for heating and defrosting of HVAC.
In the pure electric drive mode,HCU cooperates with MCU to control TM motor to drive the vehicle,be⁃cause the power value of the vehicle driving is low,and the torque of TM motor can meet the requirements of ve⁃hicle driving,so the vehicle can be driven by motor alone.
In this mode,the status of each assembly is con⁃trolled as follows:engine shutdown,TM motor drive,ISG motor shutdown,clutch separation and HV battery dis⁃charge.The energy flow diagram of pure electric drive modeisshown in Figure 2.
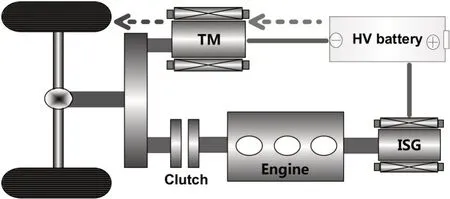
Fig.2 Energy flow of pureelectric drivemode
5 Series Mode
5.1 Engine Single Drive
The dual-motor dynamic system drives the vehicle with the engine single drive in series mode if all of the follow⁃ing conditions are met.(1)The vehicle speed is less than the threshold value.(2)The shifter position is in D or R gear.(3)HV batterySOCis in the balance area.(4)ISG motor doesnot be needed to generate electricity for charg⁃ing the battery.(5)The brake pedal is not pressed.(6)Theaccelerator pedal ispressed.
In the engine single drive mode,the driver's de⁃mand torque is within a certain range and the engine can drive the vehicle independently.The engine directly gen⁃erates electricity to TM motor,and the vehicle is driven by TM motor.HV battery is neither charging nor dis⁃charging.The engine is only responsible for generating electricity,and the clutch is not closed.The engine is controlled to work on the minimum BSFCcurve,and the engine power generation is matched with the power re⁃quired by TM motor.
In this mode,the state of each assembly is con⁃trolled as follows:engine generation,TM motor drive,ISG motor generation,clutch separation,and HV battery standstill.The energy flow diagram of engine single drive modeisshown in Figure 3.
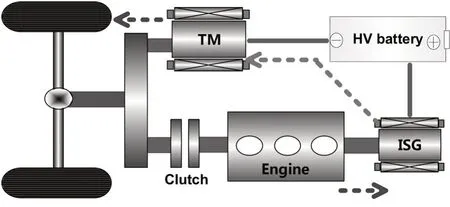
Fig.3 Energy flow of enginesingledrivemode
5.2 Engineand Motor Drive Together
The dual-motor dynamic system drives the vehicle with both engine and motor in series mode if all of the follow⁃ing conditions are met.(1)The vehicle speed is greater than the threshold value.(2)The shifter position is in D or R gear.(3)TheSOCof HV battery is greater than the threshold value.(4)The brake pedal is not pressed.(5)The accelerator pedal is pressed.(6)The driver's de⁃mand torque is larger than the value of the engine work⁃ingalonein seriesmode.
In the engine and motor drive together,the engine is used to generate power for TM motor through ISG motor rotation.When the vehicle is driven by TMmotor,the en⁃gine is only responsible for generating power,and the ve⁃hicle is not directly driven by the engine because the clutch is not closed.The engine is controlled to work on the minimum BSFC curve.Because the engine produces less power than the TM motor requires,it also needs HV battery to participate in the power supply through dis⁃charging.
In this mode,the status of each assembly is con⁃trolled as follows:engine generation,TM motor drive,ISG motor generation,clutch separation and HV battery discharge.The energy flow diagram of engine and motor drivetogether isshown in Figure4.
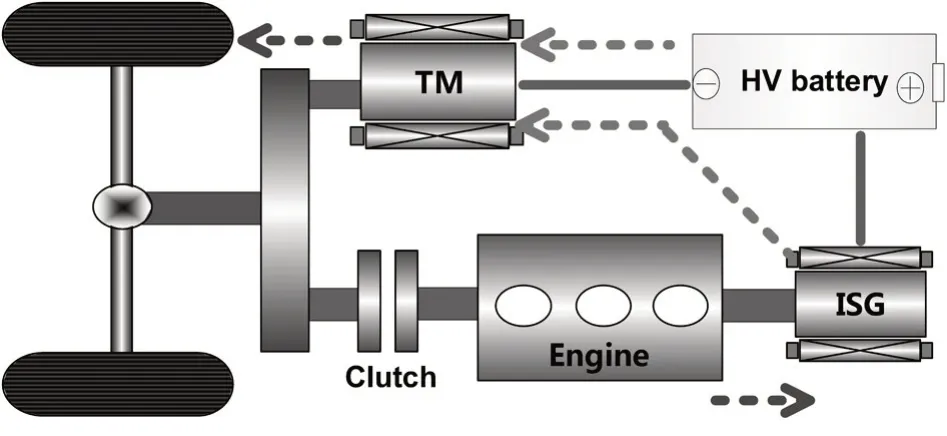
Fig.4 Energy flow of engineand motor drivetogether mode
6 Engine Direct Drive Mode
The dual-motor dynamic system drives the vehicle with engine direct drive mode,if all of the following condi⁃tions are met.(1)The vehicle speed is greater than the threshold value(for example,speed value>60 km/h).(2)The shifter position is in D or R gear.(3)TheSOCof HV battery is in the normal range,and there is no need to charge the battery.(4)The brake pedal is not depressed.(5)Theaccelerator pedal isdepressed.
In the engine direct drive mode,because the vehi⁃cle's required torque is consistent with the engine's high efficiency zone,so HCU cooperatively controls the en⁃ginetorun in thehigh efficiency operation area.
In this mode,the status of each assembly is con⁃trolled as follows:engine drive,TM motor shutdown,ISG motor shutdown,and clutch combination,HV battery standstill.The energy flow diagram of engine direct drive modeisshown in Figure 5.
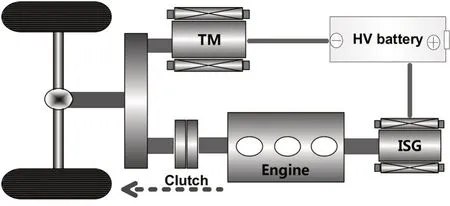
Fig.5 Energy flow of enginedirect drive mode
7 Parallel Mode
The dual-motor dynamic system drives the vehicle with parallel mode,if all of the following conditions are met.(1)The vehicle speed is greater than the threshold value(for example,speed value>60 km/h).(2)The shifter po⁃sition is in D or R gear.(3)TheSOCof HV battery is greater than the threshold value.(4)The brake pedal is not depressed.(5)The accelerator pedal is depressed.(6)The vehicle demand torque is greater than the threshold valueof enginedirect drivemode.
The dynamic system is controlled to drive the vehi⁃cle in parallel mode by the combination of engine and motor.In the process of vehicle acceleration,if the en⁃gine torque is affected by the response delay or the exter⁃nal characteristics limit,and the vehicle torque output cannot be satisfied by the engine,HCU should control TM motor to output torque to compensate.Because of the compensation of TM motor,CO2emission is reduced and tractiveperformanceisimproved.
In this mode,the status of each assembly is con⁃trolled as follows:engine drive,TM motor drive,ISGmo⁃tor shutdown,clutch combination and HV battery dis⁃charge.The energy flow diagram of parallel mode is shown in Figure 6.
8 Charge Mode
8.1 Drive Charge Mode
The dual-motor dynamic system drives the vehicle with drive charge mode if all of the following conditions are met.(1)The vehicle speed is greater than the threshold value(for example,speed value>60km/h).(2)Theshift⁃er position is in D or R gear.(3)HV batterySOCis less than the threshold value(for example,SOCvalue<40%).(4)Thebrakepedal isnot pressed.(5)Theacceler⁃ator pedal ispressed.
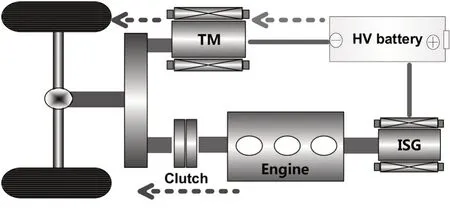
Fig.6 Energy flow of parallel mode
In drive charge mode,because the vehicle’s de⁃mand torque is less than a certain value,the engine is used to drive the vehicle while the ISG motor is used to generate electricity to charge HV battery.The effective energy utilization rate of the whole dynamic system is achieved by controlling and adjusting the engine load.
In this mode,the status of each assembly is con⁃trolled as follows:engine drive,TM motor shutdown,ISG motor generation,clutch combination and HV battery charge.The energy flow diagram of drive charge mode is shown in Figure7.

Fig.7 Energy flow of drivechargemode
8.2 Idle Charge Mode
The dual-motor dynamic system drives the vehicle with idle charge mode,if all of the following conditions are met.(1)The vehiclespeed is0 km/h.(2)The engineisal⁃ready started.(3)The shifter position is in P or N gear.(4)TheSOCof the battery is less than the threshold val⁃ue(for example,SOCvalue<30%).(5)HVACneeds to be turned on for heating or defrosting.
In idle charge mode,the engine is controlled to maintain the target generating speed,and ISG motor is controlled in the generating state.The engine generating power value is equal to the sum of HV charging power and accessory appliancespower.
In this mode,the status of each assembly is con⁃trolled as engine generation,TM motor shutdown,ISG motor generation,clutch separation and HV battery charge.The energy flow diagram of idle charge mode is shown in Figure 8.

Fig.8 Energy flow of idlechargemode
9 Energy Recovery Mode
The dual-motor dynamic system drives the vehicle with energy recovery mode if all of the following conditions aremet.(1)Thevehicle isthe processof coastingor brak⁃ing.(2)The vehicle speed is between 15 and 120 km/h.(3)The shifter position is in D or R gear.(4)The brake pedal is pressed.(5)TheSOCof HV battery is below the threshold value(for example,SOCvalue<90%).
The energy recovery is mainly carried out by the TM motor,and the recovery torque demand is reasonably dis⁃tributed accordingtothebrakeenergy recovery strategy.
In this mode,the status of each assembly is con⁃trolled as follows:engine shutdown,TM motor genera⁃tion,ISGmotor shutdown,clutch separation and HV bat⁃tery charge.The energy flow diagram of recovery mode is shown in Figure9.

Fig.9 Energy flow of recovery mode
10 Engine Start Mode
The dual-motor dynamic system will be controlled to en⁃ter engine start mode if all of the following conditions are met.(1)The vehicle speed is 0 km/h and the start-stop button is triggered.(2)TheSOCof HV battery is more than the threshold value(for example,SOCvalue>35%).(3)The torque capacity is larger than the engine starting value.(4)The engine water temperature is below 40℃.(5)HVAC needs to be turned on for heating and defrosting.(6)The shifter position isswitched into Dor R gear by thedriver.
In the process of engine starting,ISG motor is pow⁃ered by HV battery,and the engine is pulled to the target speed by ISG motor.When the engine speed reaches a certain value,the injection ignition control engine start is completed.
In this mode,the status of each assembly is con⁃trolled as follows:engine start,TM motor stop,ISGmotor drive,clutch separation and HV battery discharge.The energy flow diagram of engine start mode is shown in Fig⁃ure 10.

Fig.10 Energy flow of engine start mode
11 Summary and Prospect
In this paper,the control schemes of dual-motor series and parallel hybrid electric vehicle are analyzed,and the control strategies of different operation modes are de⁃scribed in detail.It can be seen that based on the charac⁃teristics of its own configuration,the dual-motor hybrid electric vehicle has a variety of operation modes,and it can be designed to achieve more functions than the tradi⁃tional vehicle or single motor hybrid electric vehicle.
And these operation modes play an important role in the improvement of vehicle performance.In the future,we should reach on the operation modes which can be used to promote the improvement of vehicle performance,soastofurther improvetheuser’sdrivingexperience.
At present,the dual-motor hybrid system has made great achievements,and there are some application vehi⁃cles in the current market.Because there are different power sources in the dual-motor dynamic system,it is necessary to control multiple power sources to play their respective roles under different driving conditions.The technical analysis of operation modes control strategies described in this paper can provide some reference for thefollow-up research and development.
猜你喜欢
民间故事选刊(2022年13期)2022-07-18
航天返回与遥感(2022年3期)2022-07-07
房地产导刊(2022年5期)2022-06-01
好日子(2022年2期)2022-04-28
环球时报(2022-03-16)2022-03-16
环球市场(2020年5期)2020-09-10
科技创新与应用(2016年34期)2016-12-23
档案管理(2014年6期)2014-10-30
商品与质量·消费研究(2013年7期)2013-08-29
艺术评论(2013年12期)2013-03-15
