基于RDSS和RNSS的高精度定位系统设计
2021-11-01 13:16郭竹森张会新刘宏艺金丽生撖子奇
计算机测量与控制 2021年10期
郭竹森,张会新,刘宏艺,金丽生,撖子奇
(1.中北大学 电子测试技术国家重点实验室,太原 030051; 2.北京京航计算通讯研究所,北京 100074;3.上海理工大学 医疗器械与食品学院,上海 200093)
0 引言
随着科技的的高速发展,定位技术愈加成熟,日臻完善的今天,同样存在在许多难题,尤其是在航空航天领域,以及航海领域。
由于飞行测试的增多和航海领域的发展,面对复杂环境下的飞行器和航海机械的定位仍然是一个难题。由于环境的高度复杂性,给定位和通信造成了极大的困难[1-2]。因此研究出一个可以在高度复杂环境下可以实现定位和通信的系统迫在眉睫[3-4]。国外常使用雷达定位、卫星定位等技术及进行定位。国内经常使用信标机定位的方式进行定位。从一开始的GPS定位,到现在使用的北斗导航卫星定位,再到GPS/北斗混合定位,定位精度越来越高。并且北斗卫星导航系统自带的短报文通信方式通信成功率可以达到95%,并且在海事领域,已经得到了很好的应用,同时北斗卫星导航系统在水文监测,灾害监测等方便使用广泛[5-7]。在同类研究中,为了减小功耗,增加系统的工作时间,多使用5 W的北斗模块和卡切换方式来提高通信频度的设计方案。但是,这样的设计在较为复杂的工作环境中存在一定的缺陷。一旦处于复杂的环境中,通信的成功率将变得很小。较之前的方案设计,文章设计的定位系统,采用双北斗模块轮流工作的方式来提高通信频度,并使用10 W的PA功率放大器,使得整个系统在更加复杂的环境中都可以正常工作。即使出现单一模块损坏,另一个模块也能够继续正常工作,给飞行器和船舶等大型机械充足的定位通信提供安全保障。
1 系统结构及原理
1.1 定位系统整体结构
如图1所示,该定位系统由信标机和地面接收设备两部分组成。信标机内部的通信定位模块集成了RDSS和RNSS,安装于飞行器和航海机械上。信标机通过RNSS以双模定位技术实现定位[8-11],之后将位置信息通过RDSS以短报文的形式发送至地面接收设备,地面接收设备将短报文解算之后再传送至PC端处理、显示,最后实现飞行器和航海机械的定位[12-14]。信标机由主控单元、通信定位模块和电源模块组成,电源模块由锂电池充电模块、断电模块、供电模块三部分组成;地面接收设备由两台北斗短报文接收机和电脑组成。定位系统主要实现定位和通信两大功能。

图1 总体方案示意图
信标机通过GPS/BD双模定位技术实现对当前位置信息的获取[15],可以实现快速精准定位。为防止由于外界干扰或信号较弱等因素降低通信的成功率,系统采用了双北斗模块轮流通信的设计,两个北斗模块独立工作,互不干扰。
此外,该定位系统选用的北斗模块内部含有10 W功率放大模块,用以短报文发送,相较于市场上的5 W的模块,该模块更加适用于飞行器、船舶等工作环境较为复杂的大型机械。在同等条件下,该模块在通信质量上更加出色。
该系统的技术特点和优势主要有4个:1)通信频度高,在北斗民用SIM卡一分钟内最大的通信频率为1次/min的前提下,系统通信频率提升至2次/min,提高了信标机通信成功率;2)定位精度高,在采用GPS/BD2组合定位方法基础上,对两个模块的定位信息进行处理,减小误差,在四周无明显遮挡的环境下,定位精度可以优于5 m;3)通信时,短报文经过10 W的功放模块进行功率放大,增加了通信的可靠性,可以适用于更加复杂的环境;4)系统使用双模块进行通信,比使用双卡切换的设计要更具安全性,双模块提供双份的保障。
1.2 定位原理
北斗二号导航卫星定位方式不再采用北斗一号所使用的主动式双向测距的定位方式,改用与GPS相同的单向测距三维导航。GPS系统较北斗系统在北和高程方向上表现要好,北斗导航系统则是在东西方向上由于GPS,因此,本系统采用北斗和GPS组合定位的方法降低定位误差,提高定位效果。
信标机采用GPS和北斗双模定位,有两种工作模式,分别是单模工作模式和组合工作模式。在单模工作模式下,系统单独由北斗或者GPS进行定位;在组合工作模式下,由北斗和GPS共同实现定位。在组合工作模式中,又分为两种工作模式,分别是单模定位结果融合和伪距融合。两种融合方式在位置解算和定位精度上存在很大的不同。
如图2所示,定位结果融合是将两个系统独立计算出得结果通过加权处理组合得到最终结果,但是由于两个系统的定位精度不同,对于权重很难确定,因此对于加权得到结果,其精度难以保证的。
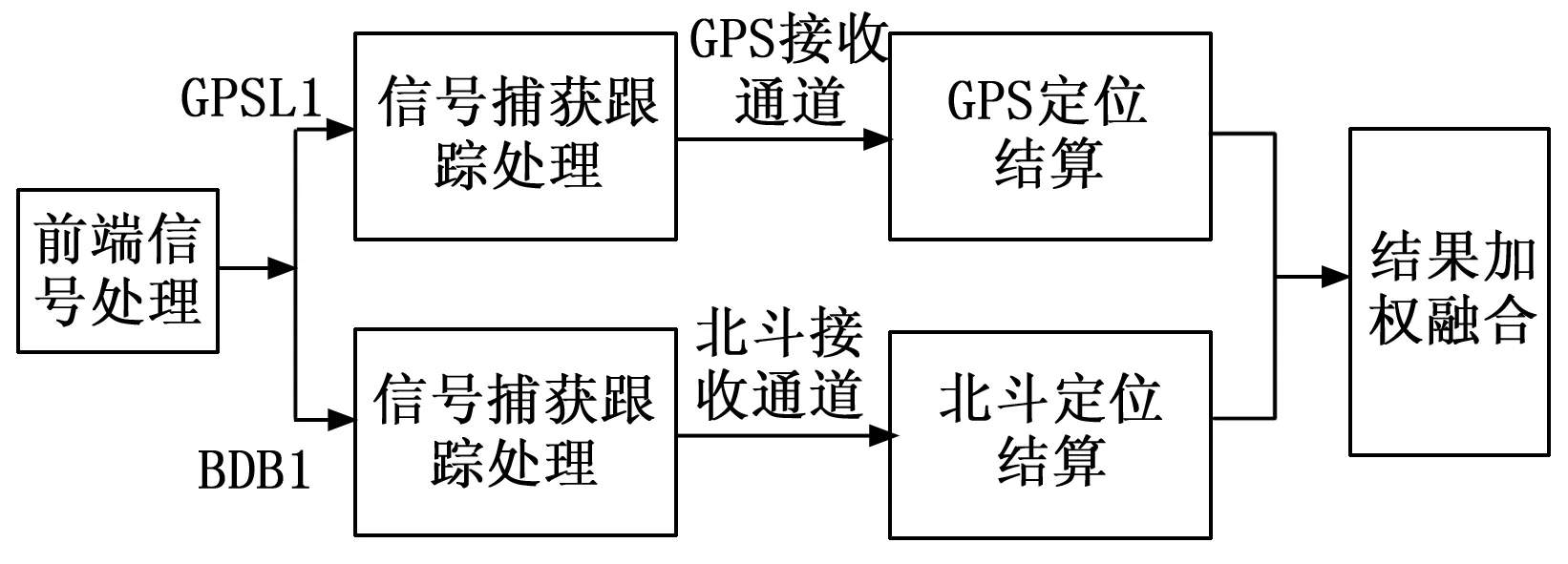
图2 结果融合
如图3所示,伪距融合是将北斗和GPS的伪距进行联合观测,同时,将两个系统的时间差纳入,组成联合方程组。通过解算两者联合后的方程组就可以得到信标机精确的位置结果。

图3 伪距融合
联合后的伪距方程会引入新的时间系统差未知因子,组合后的方程将含有5个未知参数。伪距融合能够将北斗系统和GPS系统的优势结合起立,实现更加精确的定位。联合后的方程如式(1)所示:
(1)
1.3 短报文通信原理
北斗短报文通信系统由空间系统、地面系统和用户系统3部分组成,如图4所示。
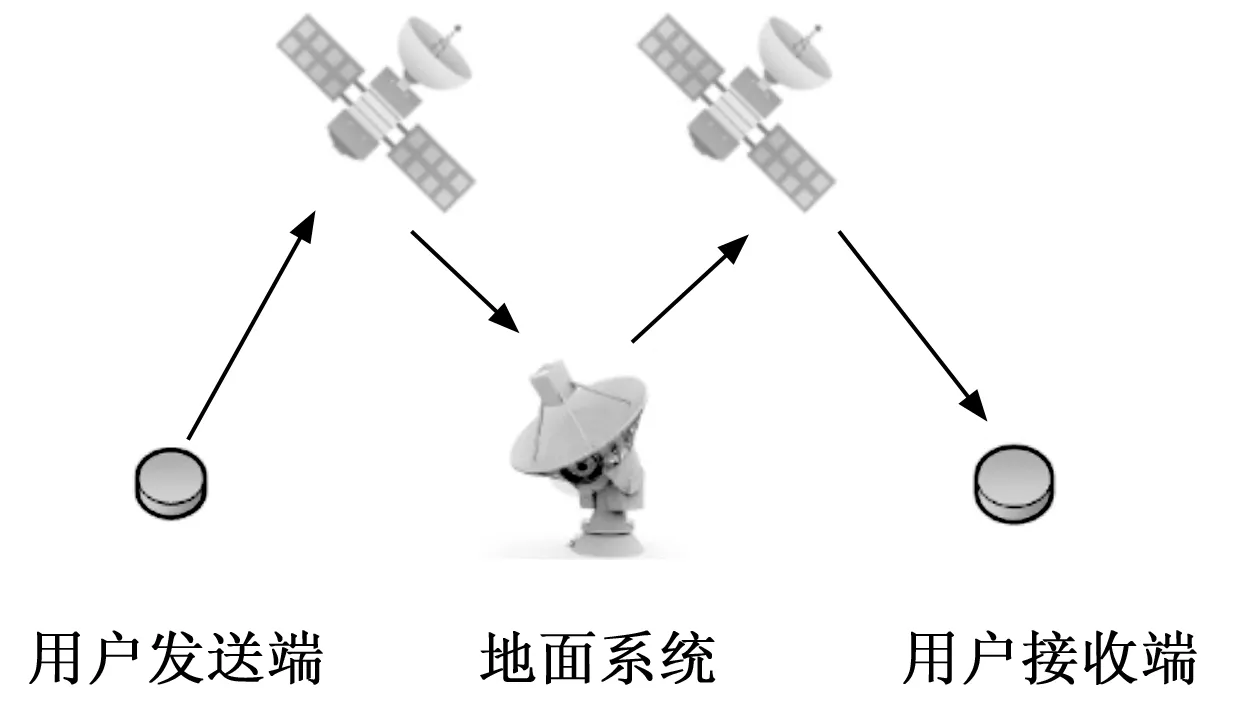
图4 短报文传输流程
发送端将短报文加密后发送至卫星,卫星收到短报文后根据接收端的地址进行广播,经广播进入地面中心,地面中心脱密再加密后再次转发给卫星,该卫星再次进行广播,接收端收到广播的短报文消息后,进行解密,完成一次通讯。北斗可以实现双向通信功能,即用户与用户、用户与中心控制系统间可实现双向简短数字报文通信,GPS只有单向的,这是北斗的优势。
2 硬件设计
2.1 主控模块设计
主控模块选用ST公司的STM32F0系列低功耗单片机,主要负责与定位通信的模块的通信以及信息处理和供电控制。该单片机拥有6路UART,满足总体方案所需要的4路UART,通过与北斗模块通信,将RNSS的定位信息进行提取、编帧,随后通过RDSS发送至地面短报文接收机。
2.2 定位通信模块硬件设计
定位通信模块内部包括两个北斗模块,该北斗模块选用北斗星通公司开发的一款集成了RDSS和RNSS功能的双模模块。模块内部集成了高性能RDSS射频接收芯片、10 W输出功率的功放模块、北斗专用RDSS基带电路,以及一款国产BD2 B1/GPS L1小型化导航定位模块,可实现RDSS定位、通信功能和RNSS导航定位等功能。该模块集成度高、功耗低、对外接口非常简单,且与常见模块接口兼容,在使用上非常方便。模块使用12 V和5 V供电,接口以及周围电路如图5所示。

图5 定位通信模块接口及周围电路
短报文发送时,单片机将已编帧信息通过串口发送至基带处理部分并转化成RDSS基带数据,经过信号调制、变频等操作处理后,将数据信息调制为L频段信号,最后在10 W功率放大器作用下对信号进行放大,通过外置无源天线TX端对信号进行发送。短报文发送模式为突发模式。北斗模块RDSS原理如图6所示。

图6 北斗模块RDSS原理框图
北斗模块内部通过RNSS进行定位。RNSS包括GPS和北斗两部分,既可以使用二者其一进行定位也可以采用GPS和北斗组合的方式进行定位。外部天线使用双模天线,接收到信号后,先由噪声放大器进行滤波、噪声放大等相关处理后,进行A/D转换为中频信号,接着通过基带信号处理电路输出定位信息。内部原理如图7所示。
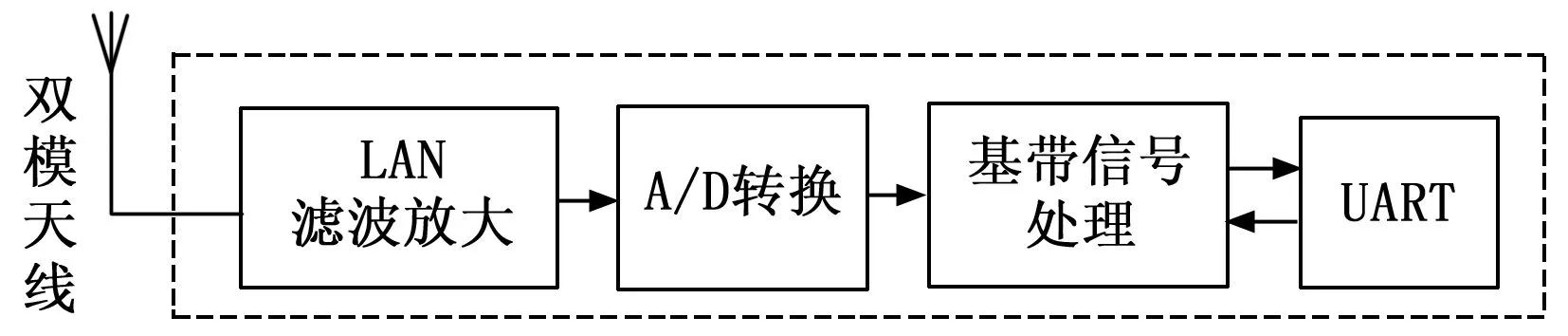
图7 北斗模块内部RNSS原理框图
在频段划分中,北斗B1和GPS的L1信号频谱重叠,两个系统发射信号又都采用右旋圆极化方式,因此可以使用同一根天线,因此,RNSS中的GPS和北斗采用一根双模天线便可以工作。同时,两个系统采用相同的CDMA扩频技术,相关通道也可以兼容的。
北斗模块通过3根高频电缆连接天线,天线选用嘉兴佳利电子股份有限公司开发的A-011&GPS型号天线,该天线由3个高频接口,分别是北斗上行发送接口L,下行接收接口S,以及混合定位所使用的B1L1接口。天线频点和极化形式如表1所示。

表1 天线频点及极化方式
2.3 供电模块设计
供电模块由两部分电路组成:一是外部供电电路;二是锂电池充电电路。系统供电主要由锂电池供电,在外部供电在测试阶段可以对锂电池进行充电,也可以对系统进行供电。
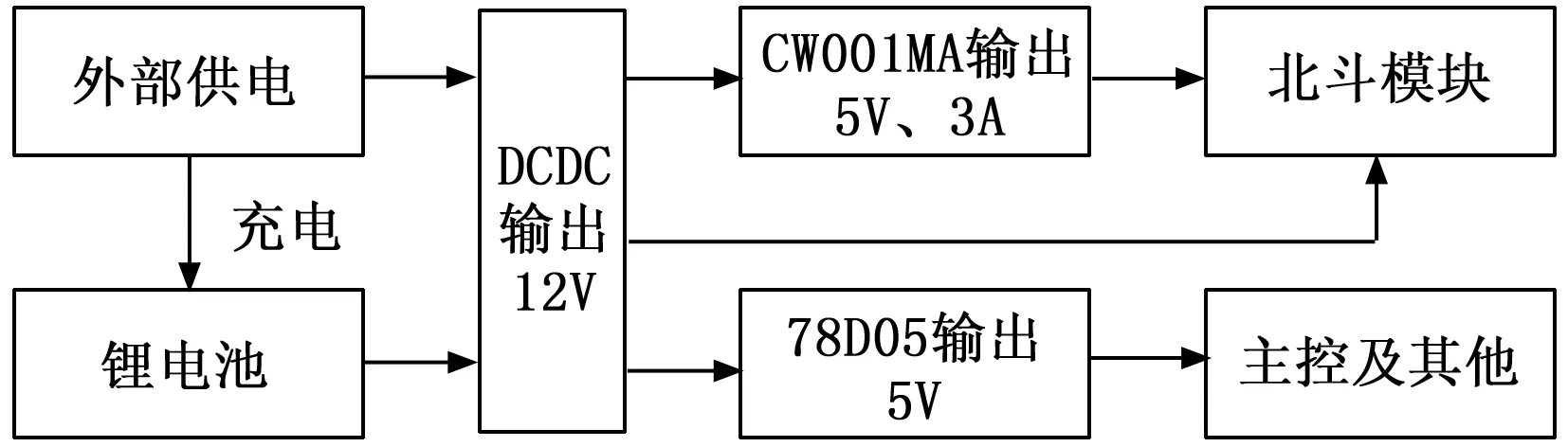
图8 供电模块原理框图
供电原理如8图所示,锂电池和外部供电经过DCDC输出12 V直流电压,然后进行二次电压变换,同时对北斗模块内部PA电路进行供电。采用CW001M芯片单独为北斗模块提供3 A的大电流;采用78D05芯片为其他模块进行供电。设计按需供电,减少功耗,延长系统工作时间。
2.4 充电模块设计
定位装置独立工作的时候采用3.4 Ah的锂电池供电,在锂电池电量耗尽时需要对其进行充电。文章中设计采用BQ24650芯片对锂电池进行充电,输入电压为15 V,芯片输出的最大充电电压为12.6 V。充电电路如图9所示,充电芯片采用恒流恒压分阶段充电的方式对锂电池进行充电。

图9 充电电路原理图
BQ24650是一个高度集成的开关模式电池充电芯片[16-17]。它提供了一个恒频同步PWM控制器,具有高精度的电流和电压调节,可对充电进行预处理、终止和状态监测。它提供输入电压调节,当输入电压低于程序设定的水平时,它降低充电电流。
BQ24650分三阶段给电池充电:预处理阶段、恒流充电阶段、恒压重带你阶段。当电流达到快速充电速率的1/10时,充电终止。充电电压可通过电阻R32和R33的比值进行调节,充电电流可通过调节R_SR的阻值进行设置。
2.5 电池供电控制电路设计
外部供电开关打开后,继电器在主控模块的控制下主动闭合,此时,外部给锂电池充电,且供给设备用电。外部供电断开后,装置独立工作,此时由锂电池供电。此时就需要断电控制电路来控制锂电池断电。
断电控制电路主要通过继电器实现[18-19]。继电器选用宏发继电器HF49FD,该继电器是小型中共旅继电器,拥有5 A触点切换能力、高灵敏度。当继电器闭合时,锂电池供电;反之,则断开锂电池供电。断电信号Lictr由单片机给出,通过一个三极管实现对继电器的控制。电路原理如图10所示。当Lictr为高电平时,三极管导通,此时,D3左右两侧的电压差为5 V,达到继电器闭合条件;反之,继电器则断开。断电时,单片机将Lictr置低,实现锂电池断电。

图10 断电控制电路
2.6 地面短报文接收终端
地面接收机使用FB-CZ-01通用型10 W北斗二代短报文通信终端,拥有自检、定位、通信功能,待机功耗≤2 W,可使用+12~30 V电压供电,拥有RS232通信接口,默认波特率为115 200。接收到信标机发送的短报文之后,负责解算短报文,并将解算结果通过RS232通信接口传输至PC端的上位机显示。
3 系统软件设计
3.1 信标机软件设计
信标机上电后,单片机开始初始化,使能两个定位通信模块开始工作,随后定位通信模块内部的RNSS开始获取位置信息并将之传输给主控模块。主控对位置信息进行提取、编帧,随后通过模块内部的RDSS以短报文的形式发送至地面北斗短报文接收机,经接收机传输到PC端进行解析、显示。两个北斗模块独立工作,在定位时和与主控通信时互不干扰;使用的北斗通讯卡是60 s卡,一分钟只能发送一次短报文信息。定位系统内部两个北斗模块(A和B)分别装有一张60 s的北斗通讯卡,为了提高短报文的通信频度,因此采用双北斗模块交替发送的通信方式。每次短报文发送间隔35 s,由于地面接收系统内部包含了两个RDSS短报文接收模块(R1和R2),因此采用A-R1,B-R1,A-R2,B-R2的方式实现定位系统和地面接收系统的通信,通信逻辑如图11所示。由于北斗模块是交替发送,因此单个模块发送短报文的时间间隔为70 s,大于北斗通讯卡发送的间隔时间60 s,提高了通信频度。信标工作流程如图12所示。

图11 短报文通信逻辑

图12 信标机工作流程
3.2 定位信息处理
北斗二号导航系统通信输出协议是在NMEA-0183基础上进行扩展的[20-21],其规则定义基本相同,但在输出的命令标识有所区别,GPS/BD2双模定位的命令标识GN。因此在单片机初始化之后,会通过串口配置北斗模块只输出定位信息,且输出标识为GNGGA,数据包含经纬度,高度等信息,且中间用“,”隔开,所以,在提取数据时以“,”为分隔标志对数据进行提取,如图13所示。在单片机提取定位信息后,与其他的信息一同编帧,之后,通过RDSS以短报文的形式将定位信息发送至地面接收。随后上传至PC端的上位机,根据帧结构进行解析后显示定位目标的地址。

图13 GNGGA数据
4 测试结果与分析
对于定位系统而言,最重要的是定位和通信两大功能,所以在试验时,主要针对这两点功能进行测试。在测试时,首先选择一处空旷且无明显遮挡的地方进行测试。将设备的天线放置在朝南的地方,且与水平面的夹角为45°左右,连续长时间不间断测试,测得的数据显示在PC端的上位机软件上。
上位机原始数据如图14所示,从图中可以看出:
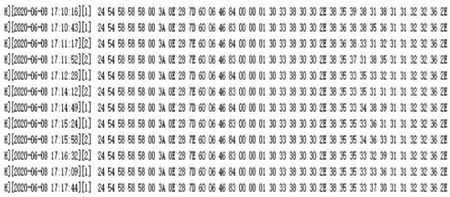
图14 信标机接收原始数据
1)定位系统能够正常工作,即可以实现定位和通信;
2)通信频度在民用SIM卡1次/min的前提下提高至2次/min。
为了检测系统定位结果和精度,在一空旷无遮挡的区域进行多次不间断测试,之后对测试数据进行处理,得到如表2和图15所示的测试结果。据表中数据可以得出:系统总体误差优于5 m,满足系统设计要求。系统单独供电时,工作时长统计如图16所示,根据图16可以得出,系统单独供电时长可以达到3 h,满足系统设计。

图15 充电测试实验结果

图16 定位装置工作时长统计图
5 结束语
文章设计的基于RDSS和RNSS的定位系统,在实际应用中,不仅能够在安全稳定的环境中工作,而且在一些较为复杂的环境中,也能够提供目标精确的位置信息,保证通信质量。此外,该信标机通过采用双模块设计,将通信频度提高至2次/min。避免了由单一模块损坏导致系统无法正常工作的情况发生,提高了通信的可靠性。该定位系统精确度高,适用性强,能够长时间地监测目标的位置。

表2 定位系统实测结果对比
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
软件导刊(2022年3期)2022-03-25
科学家(2021年24期)2021-04-25
科技资讯(2019年11期)2019-07-07
智富时代(2018年3期)2018-06-11
智富时代(2018年3期)2018-06-11
现代电子技术(2017年11期)2017-06-12
科技知识动漫(2017年4期)2017-04-15
发明与创新·大科技(2016年5期)2016-05-17