基于ATML的舰艇装备多状态测试系统设计
2021-11-01 13:15刘政,陈晨,张赛
计算机测量与控制 2021年10期
刘 政,陈 晨,张 赛
(1.中国船舶工业系统工程研究院, 北京 100094;2.南京航空航天大学 金城学院,南京 211156)
0 引言
近年来,我国的经济实力和武装实力有了飞跃式的进步,舰船装备在海上作战、任务执行、领土维护等任务执行过程中是必不可少的协作工具,另外舰艇也被广泛地应用于海上运输、医疗、侦察等多个领域,提高了海上的经济收益。为提高舰艇装备性能检测的精准度,本文提出基于ATML的舰艇装备多状态测试系统,根据舰艇装备的工作状态,判断舰艇的工作性能情况,对于性能不达标的舰艇,给予停用或者检修处理,提高舰艇领域整体的工作效益[1-2]。
舰艇又称为海军舰艇,是为数不多的具有武器装备的运输工作,舰艇是一款体积较大,成本高的军用多技术融合设备,舰艇的工作一旦出现微小的偏差,就会使得工作结果不具有意义。舰艇结构复杂,很容易出现隐性故障,为了可以及时地将工作性能达不到要求的舰艇停用处理,文章分别从硬件区域和软件区域两方面出发,设计基于ATML的舰艇装备多状态测试系统,以便达到本文预期的设计目的。最后通过对比试验测试,证明了此测试系统具有实用性。
1 基于ATML的舰艇装备多状态测试系统硬件设计
本文设计的舰艇装备多状态测试系统硬件由处理器、驱动器、传感器、监测器组成,系统硬件结构如图1所示。
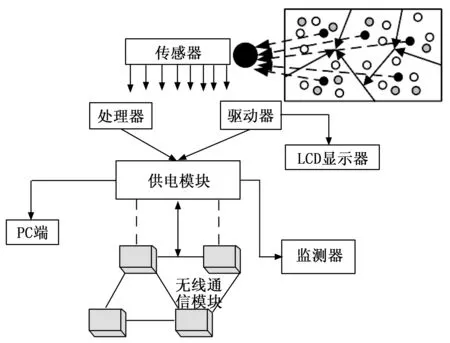
图1 基于ATML的舰艇装备多状态测试系统硬件结构
1.1 处理器设计
处理器是基于ATML技术的舰艇装备多状态测试系统硬件区域的核心器件,也被称为中央处理器,处理器的工作是处理系统内部的数据信息,并且监督执行系统内部各个器件的运行指令。处理器性能的强弱直接影响到系统性能的极限,本文为了保证测试系统的工作效率,选择麒麟990系列的处理器[3-4]。器件不仅在硬件功能上得到升级,而且对于系统的音段进行均衡处理,性价比极高。处理器采用6核心12进程的模式,器件的运行睿频最高可以达到4.3 GHz,最低为34 GHz,突破传统的处理器,内部设置了多个进程缓冲空间,降低处理器内部的负载,有利于提高处理器的运行速度[5]。
处理器结构如图2所示。

图2 处理器结构
由图2可知,处理器的热功耗为65 W,支持DDR4双通道的内存卡,采用400系列的主板,主板和处理器芯片不是相关联的,降低处理器的维修成本[6-7]。
1.2 驱动器设计
基于ATML技术的舰艇装备多状态测试系统硬件区域驱动器的工作任务是,识别到需要测试的舰艇设备时,快速调用系统内部的处理器,与之协作,快速驱动测试系统硬件区域内部所有器件,提高测试系统的响应速度。为了使得驱动器具有以上叙述的功能,本文选择HDJ-8交流驱动器,此驱动器体积大,成本低,功能强,是目前驱动器领域器件最佳的选择[8-9]。HDJ-8交流驱动器结构如图3所示。
图3 HDJ-8交流驱动器结构
由图3可知,HDJ-8交流驱动器会根据系统面对的不同型号的测试对象进行不同电压等级的驱动,分别为2.7 kV、5.7 kW、10 kV三个级别,额度工作电压为380 V,有效的输出功率为2.7 W,额定转速为1 500。驱动器内部采用24 V共阴连接方法,为了提高驱动器的适用性,内部额外增加了增量式编码器,将不同格式的器件文件进行转化。驱动器的电源采用三相AC220V模型,由于测试系统内部结构复杂,驱动器设置了多种不同类型的接口,常见的接口为usb接口、CN引脚、SIGN引脚、无线接口[10-12]。驱动器接口如图4所示。

图4 驱动器接口
1.3 传感器设计
传感器直接影响到基于ATML技术的舰艇装备多状态测试系统的测试效果,因为传感器的工作是将需要测试舰艇设备的信号、数据信息进行有效地传输,一旦传感器出现问题,传递的信息就会出现格式错误、数据源丢失、数据错误等问题,使舰艇装备多状态测试系统的测试结果存在偏差。本文选择的传感器是HDU传感器,此传感器虽然成本高,但是功能齐全,传感器的频率为10~1 000 Hz的范围之间,对于舰艇设备的自振频率为10 Hz,舰艇的速度量测量范围为0~100 mm/s,舰艇的位移的测试范围为0~1 000 μm。传感器的输出阻抗小于500 Ω,输出的有效电流为4~20 mA,有效电压为10 V,为了提高传感器的灵敏度,传感器选用固态面振激光雷达,可以排除海上信号的干扰[13-15]。HDU传感器具有独特的850 nm的红外发射波长,与其他器件相连接时,可以选用LAN接口、RS32接口。
1.4 监测器设计
监测器在本文设计的具体装备多状态测试系统硬件区内的作用一方面是在系统测试前,监测器进行初步的测试如果设备存在明显类型的故障,系统在状态测试过程中具有正确的测试方向,简化测试流程。另一方面监测器的作用是实时监测测试系统的运行,一旦出现意外,立刻停止具体的运行,防止形成更加恶劣的影响。监测器内部具有无线通信功能,监测器选用骁龙芯片,内置存储空间为64 G,并且设置多个内存卡槽[16-18]。
2 基于ATML的舰艇装备多状态测试系统软件设计
舰艇装备的内部结构复杂,根据舰艇装备的多个工作状态将设备分为动力结构、主船体结构、上层建筑控制结构3部分,本文通过对舰艇装备3个结构的运行状态进行分析,通过ATML(自动测试标记语言)技术分别进行状态分量建模,最后集成各个结构的分状态模型,完成舰艇装备多状态复杂系统的建模。
舰艇的动力供给结构的运行状态分量主要为动力供给超标状态、动力供给不足状态以及动力供给平衡状态3个分量,3个分量程度通过向量的间断值进行分辨。舰艇装备动力供给状态的特殊性在于,瞬时的动力供给量存在一定的偏差,但是一段时间内的动力供给量是可自由传递的,会出现供给修复和失效两种情况,因此对于舰艇装备动力供给多状态分量的状态建模,本文借鉴一个变量跃迁系数,以便平衡舰艇装备动力供给状态测试的误差,具体状态建模模型如下所示:
(1)
其中:ε表示舰艇装备动力供给状态变量跃迁系数;pij表示不通过的状态向量值;zx表示舰艇瞬时的动力供给数值[19-21]。
对于舰艇装备的主船体结构运行状态来说,主要有3种状态,分别是舰艇加速状态、舰艇运行故障状态以及舰艇常态性状态。根据舰艇本身的有效动力输出极限,设定舰艇的运行速度在正常马达的基础上,船体运行速度在正常速度的80%以下,为故障状态。设定舰艇装备船体结构的多状态分量模型如下所示:
(2)
其中:v表示舰艇船体的瞬时运行速度;Δv表示舰艇设备船体和上层建筑的速度差;δ表示模型误差介质。
舰艇装备的上层建筑控制结构的状态分量为无效控制状态和有效控制状态两种,控制状态通过舰艇装备内部的各个器件的调度灵敏度体现,具体的舰艇上层建筑控制状态分量建模如下所示:
(3)
其中:u1(z,t)为舰艇运行接收信号的灵敏度;ρ为模型可用度算子;z为舰艇装备的稳态系数;其他未知数的意义同上。基于ATML的舰艇装备多状态测试系统软件流程如图5所示。

图5 基于ATML的舰艇装备多状态测试系统软件流程
ATML技术是近年来发现的测试组件技术之一 ,技术主要存储自动设备内部器件的交互信息,技术采用传统的IEEE标准进行信息的传递和交流。对于本文设计舰艇装备多状态测试来说,可以精确测试系统对于设备性能参数的描述以及保证测试数据的有效性,ATML技术特殊在于技术内部交流的信息采用XML文档,对于其他格式的文字文件,不具有测试权限。另外ATML技术在接入测试资源的同时,不会更改资源的数据源,干扰自动设备内部各个组件的调用速率,反而会提高舰艇装备多状态测试系统与内部资源的交互性。ATML技术对于测试自动设备内部的虚拟资源以及信号提供专有的数据支持。
如图5所示,采用ATML技术实现参数自检,完成系统调整并对系统进行初始化,保证系统参数的完整、全面及准确性,在此基础上建立状态分量建模,提取舰艇装备多状态数据,输出状态检测结果,完成基于ATML的舰艇装备多状态测试系统软件流程设计。
3 实验分析
为验证基于ATML的舰艇装备多状态测试系统的实用价值,本文进行对比试验测试。为了使试验测试数据具有科学性和可信性,本文选用两个通过专业测试的舰艇装备多状态测试系统作为试验测试的对照系统,分别是基于GPS导航的舰艇装备多状态测试系统和基于STD的舰艇装备多状态测试系统。
在对比试验测试前,工作人员需要准备3个计算机、一个数据分析仪以及一台舰艇装备设备,测试工作准备好后,将3个舰艇装备多状态测试系统分别在3个相同型号的计算机内启动,同时将3个系统一端接入舰艇装备设备的控制中心,另一端接入数据分析仪器内,测试环境搭建成功后,开始进行试验测试。根据舰艇装备多状态测试系统的实际应用需求,本文将测试时间、测试结果精准度、系统的稳态性作为实验测试的分析因素。同一时间开始试验后,工作人员不需要进行其他的测试操作,当3个测试系统全部向中心提交舰艇装备多状态测试系统的测试参数后,结束试验,通过数据分析仪分析测试数据,进行试验数据分析。
因为对比测试的流程具有一定的逻辑性和专业性,试验测试结果具有可信性。整理试验测试的数据,得出不同舰艇装备多状态测试系统的间隔时间如表1所示。
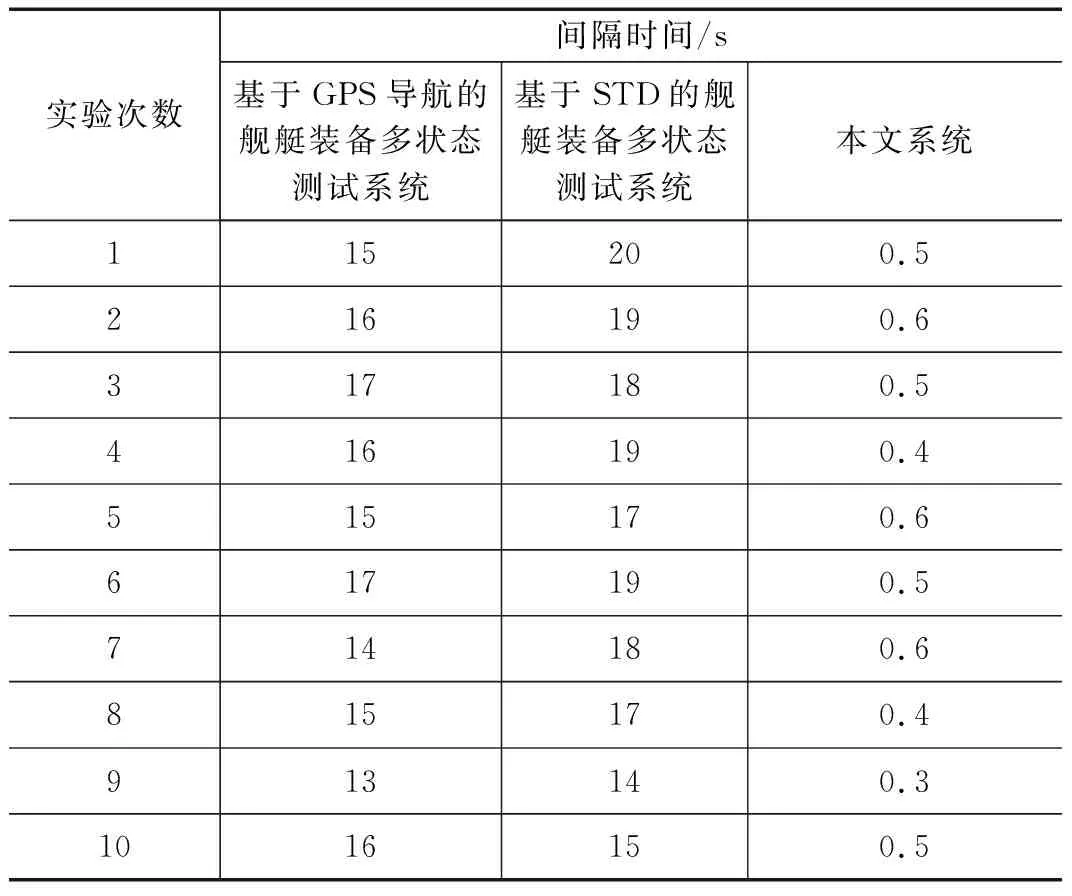
表1 间歇参数实验结果
分析表1实验结果可知,基于GPS导航的舰艇装备多状态测试系统的平均测试间隔时间为15.4 s,基于STD的舰艇装备多状态测试系统的平均测试间隔时间为17.6 s,本文系统的平均测试间隔时间为0.49 s。实验结果表明,本文系统在对舰艇装备设备多个状态共同测试时的间断性较小,测试效果较好。
在此基础上测试不同舰艇装备多状态测试系统的测量误差,即舰艇装备多状态数据的相对误差,通过不同系统对舰艇装备多状态数据的测试结果与实际值对比得出。得到实验对比结果如表2所示。
分析表2可知,基于ATML的舰艇装备多状态测试系统与基于GPS定位的舰艇装备多状态测试结果的误差较大,本文选用舰艇装备实际的性能状态参数的均值误差最小;本文设计的基于ATML的舰艇装备多状态测试系统在传统舰艇基本状态参数测试的基础上,还增加设备瞬态性参数的测试,并且每个状态的各个等级的性能指标都一一对照列出,使得测试结果简单化。

表2 测试系统误差实验结果
综上可以得出,本文设计的测试系统性能比基于GPS定位的舰艇装备多状态测试系统的性能好,具有较高的测试准确度和稳态性,可以进行实际应用。
4 结束语
通过以上的论述,完成了基于ATML的舰艇装备多状态测试系统的研究,因为本文在传统测试系统软件设计的基础上,增加了舰艇多状态复杂系统模型,并且重新梳理了ATML技术测试资源的逻辑性,使得舰艇装备多状态测试系统的反应速度最快,性能达到最佳。将本文设计的测试系统作为研究基础,进一步分析其他海上航行设备的多状态测试系统,以期提高航行设备的工作效果,为促进海上经济发展做出贡献。
猜你喜欢
军事文摘(2022年13期)2022-08-27
凤凰动漫(军事大王)(2022年3期)2022-06-17
电脑爱好者(2020年6期)2020-05-26
电脑爱好者(2019年15期)2019-10-30
兵器知识(2017年10期)2017-10-19
中国信息化周报(2017年4期)2017-03-23
中国计算机报(2009年12期)2009-07-02
微型计算机(2009年17期)2009-05-19
电子设计应用(2004年7期)2004-09-02
电子设计应用(2004年6期)2004-07-27