
复杂环境下无人机智能巡检轨迹规划方法研究
2021-10-29 12:18田小壮刘家辛常雪婷
电子设计工程 2021年20期
田小壮,石 辉,刘家辛,曹 飞,常雪婷
(1.国网新疆检修公司,新疆乌鲁木齐 830000;2.北京中飞艾维航空科技有限公司,北京 100176)
目前,变电站巡检主要依赖于人工巡检,对于高度较高的输变电设备,需要检测人员爬上输变电设备或通过望远镜、红外检测仪等辅助设备进行检测[1-5]。人工巡检过程需要花费巨大的人力资源,且巡检危险性高、准确度低,容易因巡检人员的主观印象、不规范操作等问题造成检测结果出错[6-9]。
随着物联网技术的高速发展,无人机逐渐应用于变电站巡检。通过搭载的摄像头或红外检测仪采集输变电数据,结合大数据分析技术实现变电站的智能巡检[10-11],其具有巡检效率高、准确度高与成本低的优点[12-15]。
因此文中开展无人机智能巡检关键技术研究,基于三维激光点云数据,实现变电站复杂环境的仿真建模,解决在750 kV 及以上电压等级变电站的复杂环境下无人机智能巡检轨迹规划问题[16]。
1 基于RTK的无人机定位方法
实时动态差分法(Real-Time Kinematic,RTK)是常用的GPS 定位方法,通过载波相位差分技术实现厘米级精度的实时定位。该文采用RTK 技术,实现无人机的精准定位。
1.1 载波相位观测模型
假设卫星在ti时刻发射载波信号,其初始相位为φ(ti);观测站T1在tj时刻接收到载波信号,其相位为φ(tj),则卫星发出与观测站接收到的载波信号相位延迟为:

式中,N为相位延迟的周期整倍数部分,ΔN为相位延迟的整数部分。
由于卫星与观测站的时钟和系统时钟存在差别,因此有:

式中,Ti与Tj分别为卫星发出和观测站接收到载波信号的时间;δti与δtj分别为卫星和观测站与系统的时间偏差。
载波信号的相位与频率存在线性关系:

结合式(1)~(3)可得:
式中,δρ1和δρ2分别为电离层与对流层对载波信号传输延迟的影响,ρ为卫星与观测站的距离。
由此得到,观测站对卫星的载波相位观测模型为:

1.2 载波相位观测单差分模型
如图1 所示,通过两个观测站T1与T2同时对卫星m发射的载波信号进行接收,分别建立T1和T2的载波相位观测模型,模型中的数值关系如式(7)所示。
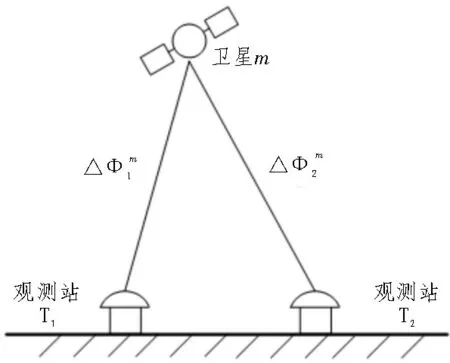
图1 载波相位观测单差分模型
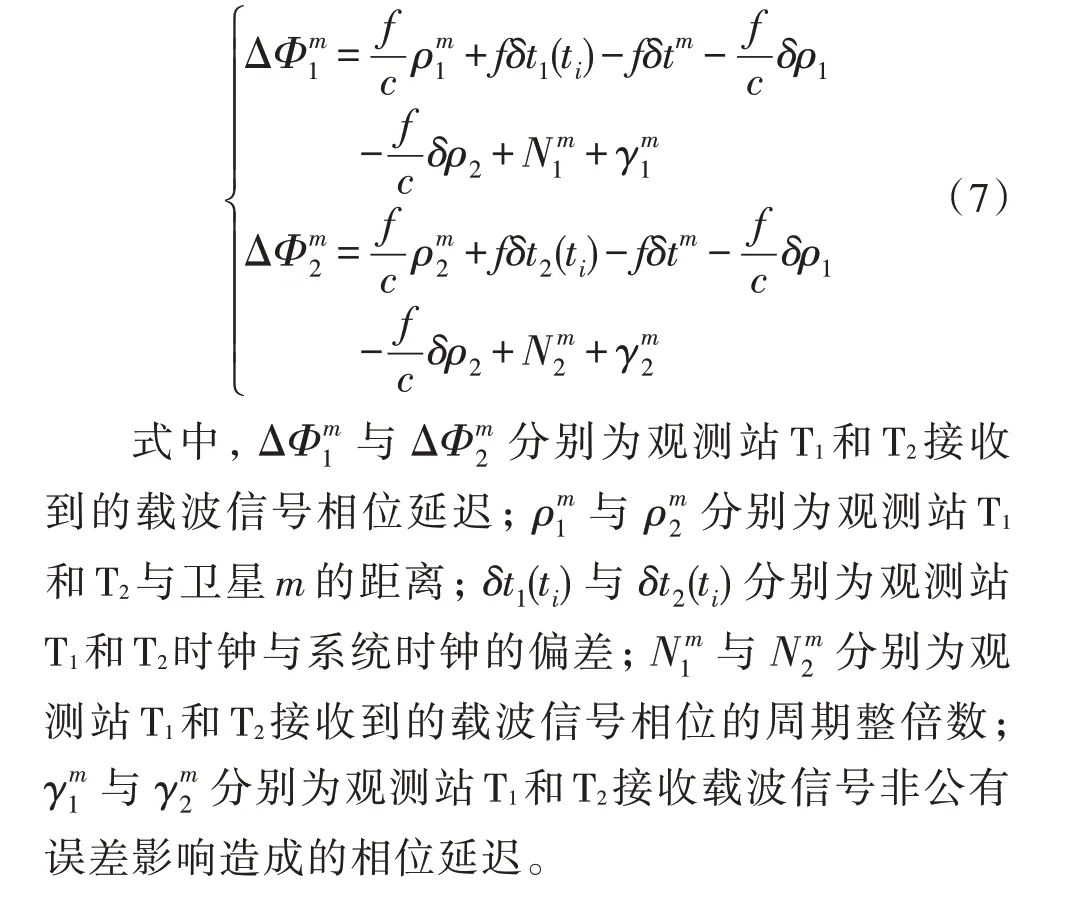
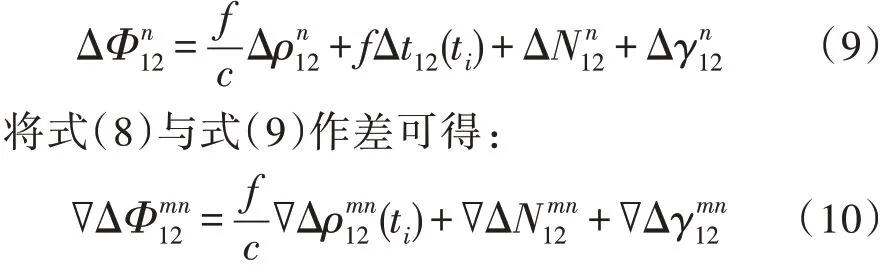
通过差分计算消除公有误差的影响,得到载波相位观测单差分模型:
1.3 载波相位观测双差分模型
设两颗卫星m与n由观测站T1、T2对其展开载波相位观测,如图2所示。建立单差分观测模型,如下:
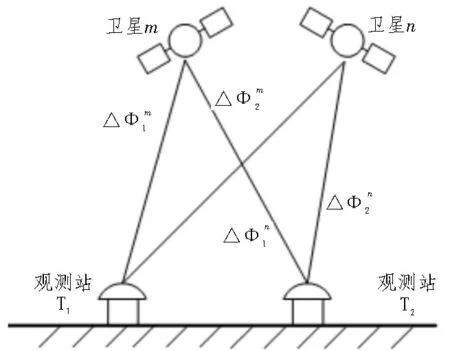
图2 载波相位观测双差分模型
卫星m的坐标为(xm,ym,zm),观测站T1的坐标为(x1,y1,z1),则二者的距离如下:

2 无人机智能巡检轨迹规划方法
2.1 变电站无人机智能巡检系统
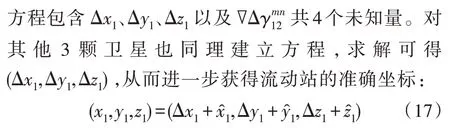
变电站无人机智能巡检系统架构,如图3 所示,其主要分为机载系统与地面系统两部分。
图3 变电站无人机智能巡检系统架构
机载系统包括飞行控制系统与任务系统,实现无人机飞行智能控制,完成图像等数据的测量采集任务;地面系统包括监控系统与数据处理系统,实现对无人机巡检过程的监控以及对回传的巡检数据处理分析,从而发现变电站存在的安全风险隐患[17-18]。
2.2 基于改进RRT算法的巡检轨迹规划
1)复杂环境三维空间建模
750 kV 及以上电压等级的变电站,在电塔高度、设备种类、电气接线等方面更加复杂。利用无人机进行智能巡检需要更全面的考虑复杂环境的影响,主要障碍物是电气设备与电塔。
点云数据是常用的一种数据结构,该数据包含了丰富的目标物体表面及细节信息。但每组点云数据之间的联系却较为模糊,因此有必要通过建立相应的拓扑关系网络,明晰数据之间的关系,从而实现有效信息的快速获取。
文中采用八叉树模型构建变电站三维激光点云仿真模型,其核心思路是将变电站三维空间划分成8个立方体子空间,然后继续合并或分割这些子空间,当达到最大递归层次或子空间个数为空时,循环结束。其流程如图4 所示。
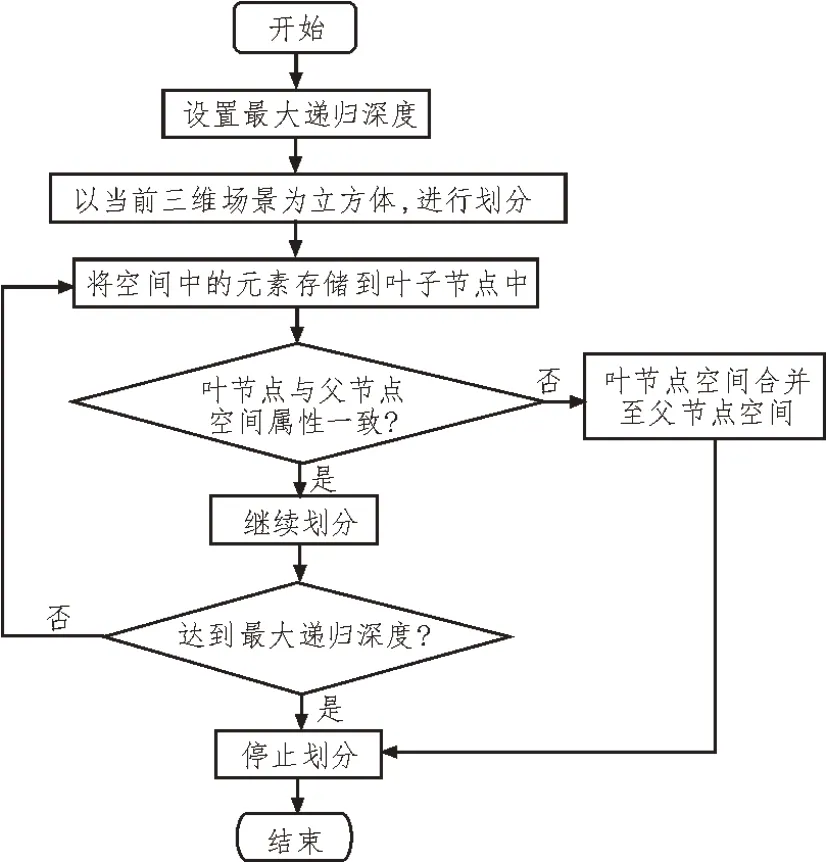
图4 基于八叉树的变电站三维点云建模流程
2)基于改进RRT 算法的智能巡检轨迹规划方法
快速拓展随机树(Rapidly-exploring Random Tree,RRT)算法是解决轨迹规划问题的常见方法,在可行空间中进行随机选点。通过碰撞检测确定路径,能够适应复杂环境下无人机的轨迹规划。但由于RRT 算法搜索的随机性,生成的路径通常不是最优的且存在众多冗余节点。因此,文中提出一种去冗余节点的改进方法。
图5(a)为RRT 算法的搜索示意图;图5(b)为去冗余节点的改进方法示意图,基于改进RRT 算法的轨迹规划过程包括以下步骤:
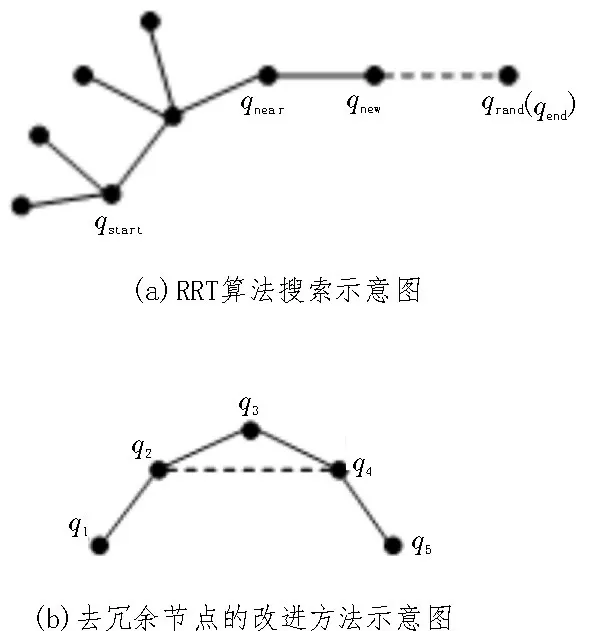
图5 基于MRRT算法的无人机智能巡检轨迹规划
①以起始节点qstart作为随机树起始根节点。
②随机节点qrand是目标节点qend的概率为p,是巡检空间中任意点的概率为(1-p)。
③从已有随机树的叶节点中选取距离随机节点qrand最近的点,称为临近节点qnear。
④从临近节点qnear出发,往随机节点qrand的方向延伸步长λ的距离,得到新节点qnew。
⑤判断临近节点qnear与新节点qnew间的路径上是否存在障碍物。若是,则返回步骤②;否则,将新节点qnew加入随机树,进行下一步。
⑥判断当前随机树是否包含目标节点qend。若是,则进行下一步;否则,返回步骤②。
⑦在当前随机树,从目标节点qend出发向起始节点qstart进行逆向搜索,确定巡检轨迹。
⑧对巡检轨迹进行去冗余节点操作,若巡检轨迹中两点之间的路径未有障碍物,则删除中间节点。
3 算例分析
将该文所提方法应用于某750 kV 变电站的无人机智能巡检过程进行仿真分析,验证所提方法的有效性与正确性[19-21]。
3.1 基于RTK的无人机定位精度分析
传统无人机定位方法与基于RTK 技术的定位方法仿真结果,如表1 所示。可见传统定位方法在Z方向上的定位偏差最大,数值为±0.83 m,相应标准差为0.321 8;而RTK 方法在X、Y与Z方向上的定位偏差均小于传统方法,在Z方向上定位最大偏差仅为±0.22 m,具有更高的定位精度。
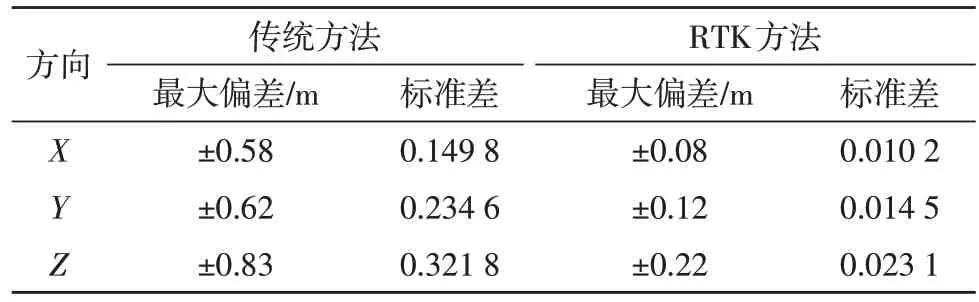
表1 3个方向定位最大偏差和标准差
3.2 巡检轨迹规划结果分析
RRT 算法改进前后的规划结果对比,如图6 所示。可见传统RRT 算法所得巡检轨迹由较多折线连接形成,中间存在38 处转折点,路径总长度为1 232.62 m;改进RRT 算法所得巡检轨迹仅存在5 处转折点,路径长度为875.16 m。由此可见,改进RRT算法能够有效缩减巡检路径长度,达到降低巡检无人机飞行能耗的目的。
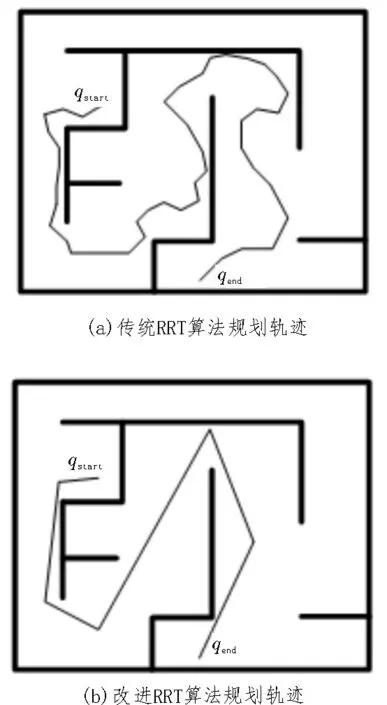
图6 改进RRT与传统RRT算法轨迹规划对比
4 结束语
文中分析RTK 技术的原理,构建了变电站无人机智能巡检系统架构,采用八叉树模型实现变电站三维激光点云仿真建模,进一步提出基于改进RRT的无人机智能巡检轨迹规划方法。通过算例仿真表明,该文所提出的基于RTK的定位方法在X、Y与Z3 个方向上均具有更小的定位偏差和标准差,能够提高无人机定位准确度。所提基于改进RRT 算法的变电站智能巡检轨迹规划方法,能够在保证巡检范围的前提下缩减巡检路径长度,降低巡检成本。
猜你喜欢
舰船电子对抗(2022年6期)2022-12-25
科学导报(2022年39期)2022-07-04
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
现代装饰(2018年5期)2018-05-26
航空学报(2017年5期)2017-11-20
中国三峡(2017年2期)2017-06-09
西部广播电视(2015年10期)2016-01-18
电测与仪表(2014年15期)2014-04-04
华东理工大学学报(自然科学版)(2014年2期)2014-02-27
