
基于雷达干扰方程的电子攻防突破策略分析
2021-10-29 12:18孙吉良梁洁赵成斌申江江
电子设计工程 2021年20期
孙吉良,梁洁,赵成斌,申江江
(中国人民解放军91206 部队教研部,山东青岛 216108)
现代战争是电子攻防的对抗战,采用电子干扰等重要手段压制敌防空系统,是现代突防常用的战术措施[1-4]。其中,利用干扰机为己方突防飞机提供干扰掩护是十分重要的环节。在使用不同雷达部署、不同干扰方式的情况下,分析进攻策略,将有助于己方飞机突防,提高行动成功率[5-8]。
1 雷达干扰方程及模型简化
干扰效果的好坏在实际使用中通常用最小干扰距离来衡量[9]。雷达干扰方程如式(1)所示:
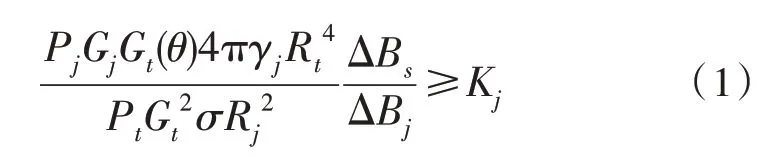
其中,Pt为雷达发射功率,Gt为雷达天线增益,σ为目标的有效反射面积,Pj为干扰功率,Gj为干扰天线增益,Gt(θ) 为雷达天线在干扰机方向的增益,γj为干扰信号与雷达信号的极化失配系数(一般取γj=0.5),ΔBs为雷达信号有效频谱宽度,ΔBj为干扰信号频谱带宽,Kj为在雷达接收机输入端有效干扰的压制系数(一般取15 dB)。对式(1)进行整理,可得到干扰机的有效干扰空间,如下所示:

有效干扰空间是Rt4和Gt(θ)的乘积,当目标、雷达、干扰机同方向时,θ=0、Gt(θ)=Gt、Rt最小,可得式(3):
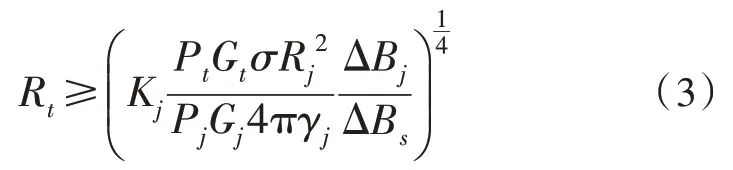
其中,PjGj为干扰机对雷达的有效干扰功率,ΔBs为雷达在自有工作模式下的等效带宽,ΔBj为干扰机干扰信号频谱带宽。由式(3)可得雷达最小干扰距离
2 对雷达组网系统的有效干扰
雷达组网系统是指将不同体制、不同频段、不同程式以及不同极化方式的雷达或者无源侦察装备适当布站,借助通信手段链接成网,由中心站统一调配而形成的一个整体。针对雷达系统的电子攻防战即为干扰机与雷达组网系统之间的对抗。
干扰机采取的干扰方式通常有两种:远距离支援干扰与随队支援干扰。
远距离支援干扰[10-12]是对敌方远程预警雷达、目标指示雷达等实施的干扰,兼顾对制导雷达实施干扰。远距离支援干扰机通常处于敌火力圈之外,沿跑道(或近似跑道)航线巡航,通过侧向释放大功率干扰信号形成有效干扰。
随队支援干扰[13-14]主要对制导雷达进行干扰,干扰能量从雷达主瓣进入雷达接收机。干扰飞机通常以战斗机为载体,可随突防飞机进入敌方火力范围,采用电子假目标欺骗干扰方式。在一定的区域内,电子假目标可以被组网雷达识别成“真目标”,从而构成电子假目标干扰的掩护区域,如图1 所示。
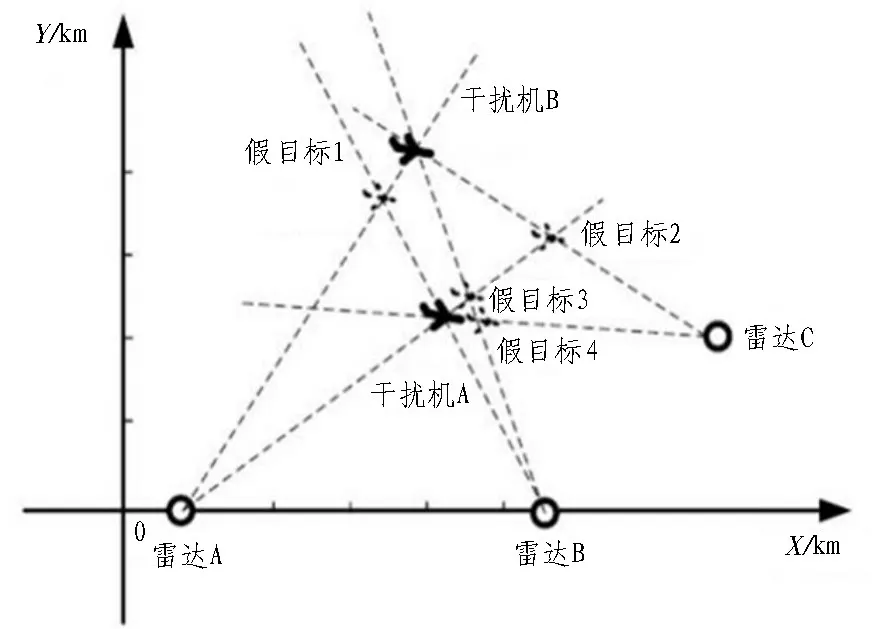
图1 两架干扰机分别干扰不同雷达时假目标形成示意图
由此可分析得到,干扰机对雷达形成有效干扰的条件如下:
1)干扰机与雷达的天线可以对准,即干扰机与雷达距离的连线中间没有障碍物;
2)满足雷达干扰方程,即干扰机与雷达之间的距离大于最小干扰距离。
在多部雷达共同组成的雷达组网系统中,有效发现可以定义为被两部以上的组网制导雷达发现并满足同源检验条件,或者被一部警戒雷达发现;而有效保护则指真目标存在于假目标被组网雷达识别成真目标形成的干扰掩护区域内。
3 攻防模拟中的边界问题
在雷达组网的电子攻防中涉及的边界问题主要有两类,一类是由最小干扰距离限制形成的干扰扇形边界;另一类则是由于遮蔽区形成的空间边界[15-16]。
现有一批作战飞机对敌方某重要目标实施突击。敌方的重要目标O(X轴坐标原点)、机群飞行起点、机群攻击线T 和障碍区S 等相对位置如图2 所示。作战机群飞抵攻击线T 后对重要目标O(坐标原点)实施攻击,在从起点至攻击线T的飞行过程中,攻防双方展开电子战。
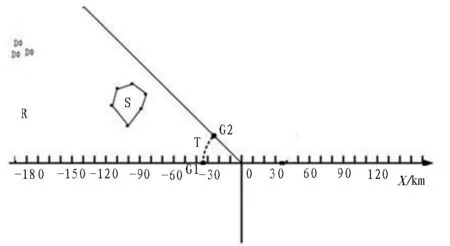
图2 电子攻防示意图
假设所有飞机都无法通过障碍区S,雷达信号也无法穿越障碍区S,则障碍区将对作战飞机形成遮蔽区域。随队支援干扰机对作战飞机形成电子假目标掩护,远距离支援干扰机对作战飞机实施窄带压制掩护。
3.1 电子假目标随队支援掩护
在电子假目标干扰模式下,只要突击机群目标在假目标干扰扇形角度θ内,即可认为目标处于掩护区域内,可以安全执行突击任务。根据干扰原理,只要雷达天线与干扰机天线能对准(即可以连成一直线),便能形成角度θ的扇面,因此,只要雷达与干扰机中线能直线连接,即可形成假目标。如图3 所示,在障碍区S的右下方遮蔽区域内,S2S3S4P 组成的阴影部分形成假目标扇面。图中,P、N、K、M 点布设组网雷达。假目标扇面如图3中S2点所示,其他点以此类推。
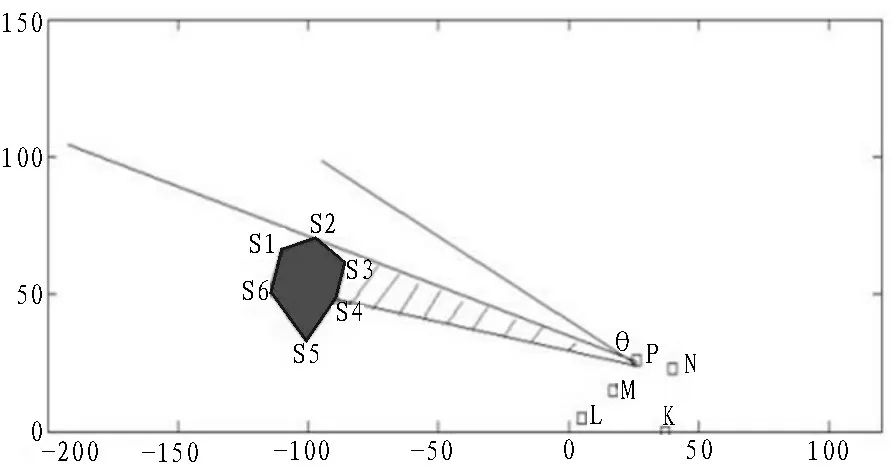
图3 遮蔽区内假目标掩护扇形区域
3.2 远距离支援干扰机
远距离支援干扰机处于敌火力圈之外,通常距离干扰目标数百公里,沿跑道形航线巡航,转弯半径可忽略不计。图4 中H 为其巡航路线。
当不考虑障碍区时,雷达是否处于远距离支援干扰机的干扰波束覆盖范围之内与两者的相对位置有关,假设远距离支援干扰机的干扰波速覆盖范围为飞行方向侧向±50°,则可推得干扰飞机在巡航过程中各个时刻的干扰覆盖范围,如图4 所示。
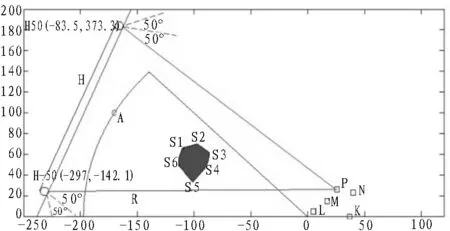
图4 飞机干扰波束角度覆盖范围限制条件
考虑障碍区S 覆盖的范围可知,当远程支援干扰机行至H 中虚线段时,无法对雷达P 进行干扰,满足使P 雷达处于远距离支援干扰机的假目标干扰范围内,如图5 所示。其他各雷达以此类推。
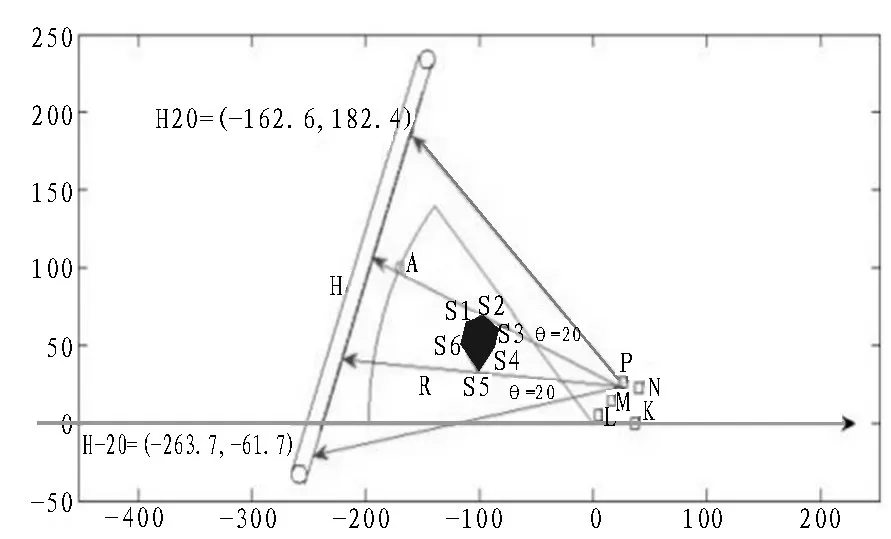
图5 飞机干扰波束扇面覆盖范围限制条件
4 案例分析
在图3的基础上,确定几个点的坐标,分别为K(37,0)、L(5,5)、M(17,15)、N(40,23)、P(26,26)、S1(-110,66)、S2(-97,70)、S3(-86,61)、S4(-89,48)、S5(-101,33)、S6(-115,51)、G1(-35,0)、G2(-24.7,24.7),远距离支援干扰机侧向干扰范围为100°,随队支援干扰机正向干扰假目标扇面为±20°。在干扰机掩护下,规划机群从A 点安全到达攻击线T的干扰策略。
由于飞机与干扰信号都无法通过障碍区S,因此,为了充分利用障碍区所形成的隐蔽区域,将机群突防区域R 进行分区分析。将各个雷达与障碍区最外侧切点连线,即分别将L、M、N、K、P 与S2(经计算,S2 与S3 相比,S2 为所有雷达点的最外侧)、S5 连线,可得到各雷达与障碍区边界的关系。
各连线和突防区域R 边界的交点如表1 所示。
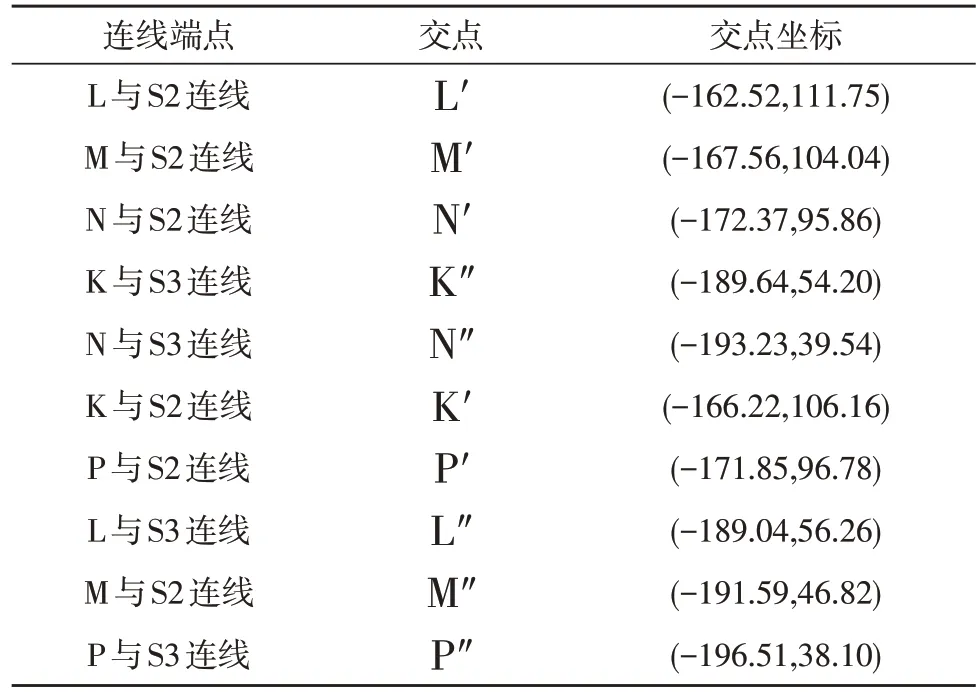
表1 各连线与突防区域R边界交点数据
4.1 区域T1
根据前文有效发现的定义(见第2 节),只有组网雷达系统中两部以上雷达获取的目标信息满足“同源检验”条件,该目标信息才会被确认为是“真目标”,因此,只有一部制导雷达能够照射到的区域同样是安全的。障碍区S 屏蔽所形成的安全区域T1 如图6 所。区域T1 为S2、P′、K′、S5、S6、S1 所围成的区域,当突防飞机进入T1 区域后,不存在突防风险。
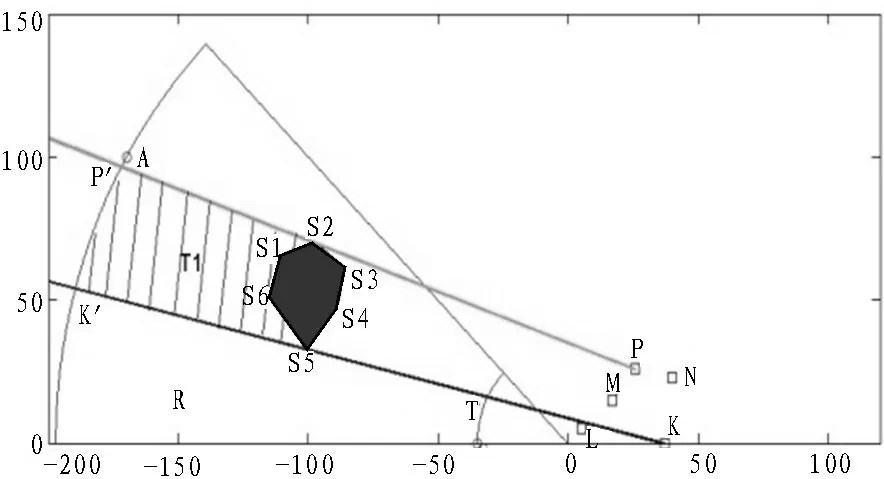
图6 T1区域示意图
4.2 雷达监视区域T2
当己方机群处在T2 区域时,如图7 中S5、K″与P″所围成的区域所示,机群进入多部制导雷达监视区域。此时,机群处于警戒雷达P的盲区内,根据需要开启若干干扰机对地方制导雷达进行压制,满足题设条件即可正常通过。
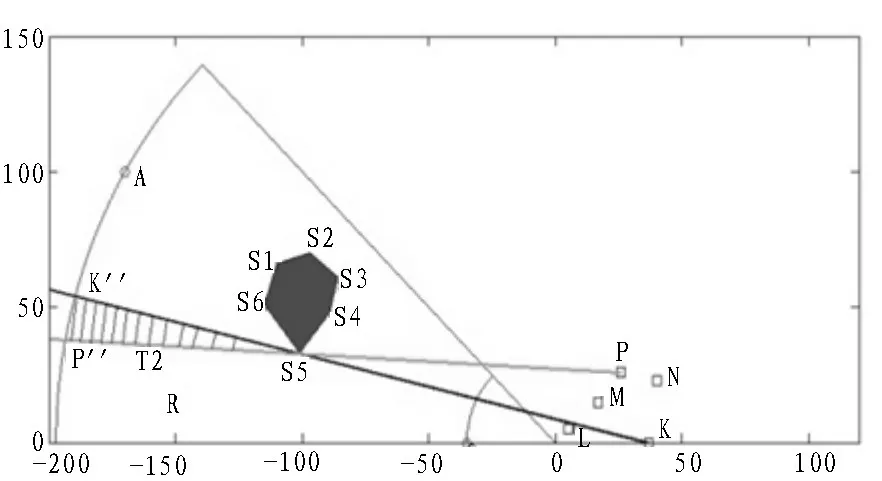
图7 T2区域示意图
4.3 雷达监视区域T3
所有雷达监视区域T3 为PP″与突防区域R 及攻击线T 所围成的区域,如图8 所示。在T3 区域中,突防飞机进入了所有雷达的监视区,进入该区域后,需要专门利用己方远距离支援干扰飞机针对警戒雷达P 进行干扰,并根据需要对敌组网制导雷达进行干扰。
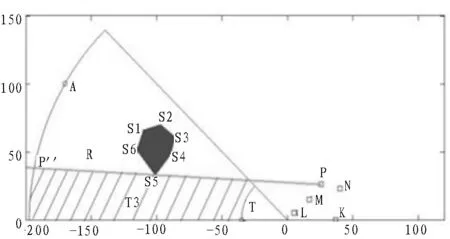
图8 T3区域示意图
考虑到达的安全性要求,突击机群在飞行的所有时刻均受到有效的干扰保护。即同时满足条件预警雷达和组网制导雷达在任意时刻均无法发现突击机群。
为了绕开障碍区域S,规划机群的飞行路线有两个方向:
1)从S 区域下方绕行;
2)从S 区域上方绕行。
方案一:区域下方绕行
绕行障碍区S 下方,需要经历3 个区域,分为3个不同的阶段进行考虑。
Step1:突防机群迅速进入T1 区域
设H2为点P 和S2的延长线与远程支援干扰机Y 航迹H的交点,HA为点P 和A的延长线与远程支援干扰机Y 航迹H的交点,计算可得H2坐标,攻击机群J 从点P2(P2在直线PS2 上)进入安全区域,其进入时刻为tP2。
远程支援干扰机从HA飞到H2的时刻为tH2,从该时刻起,远程支援干扰机无法对预警雷达P 进行干扰,也就是说,攻击机群需要在该时刻前进入安全区域,设从A 点起飞的时刻为0,则须满足条件:
其中,VJ为攻击机群的飞行速度。
Step2:从T1 区域进入T2 区域,此时,根据情况依照限制条件开启干扰
在该区域内,可以选择多种方式进行干扰,这是一个多选择的弱约束,只需要满足距离和覆盖波束范围约束。
Step3:进入T3 区域,向T 攻击线进攻
设进入点为P5,点H5为点P 和S5的延长线与远程支援干扰机Y 航迹H的近交点,H5′为远交点。
为保证攻击机群不被预警雷达P 发现,则攻击机群J 到达点P(5P5在直线PS5的延长线上)进入该区域时,处于远程支援干扰机的干扰范围内(假目标干扰),如图9 所示,此时远程干扰机Y的位置为Hp,需满足如下条件:和tH5分别为突防飞机到达P5和远距离支援飞机到达H5的时刻点。
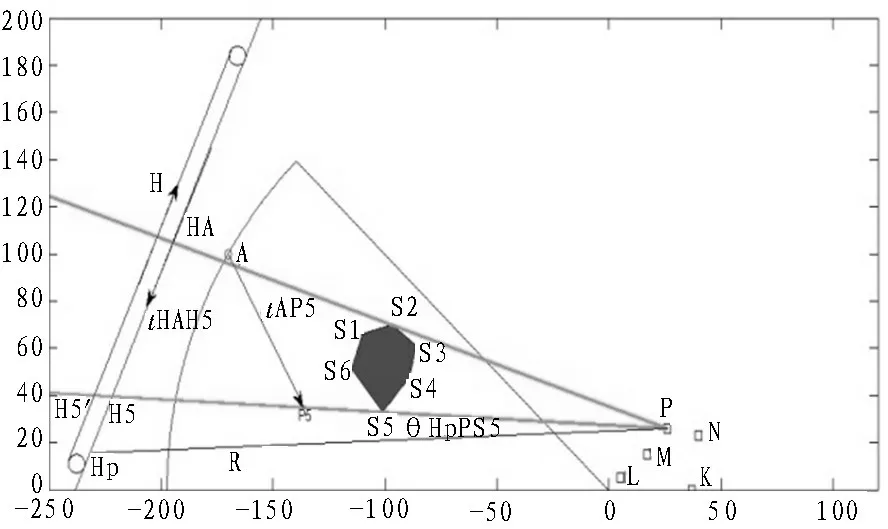
图9 T2区域突击过程示意图

也就是说,远程支援干扰机比攻击飞机先到达预警雷达边界,且不超出扇形角度范围。
从区域下方绕行路线对策:远程干扰机对P 进行假目标干扰,所有雷达在此阶段对组网进行干扰。
远距离支援干扰飞机需要全程对雷达P 进行有效干扰,可以采取两种方式进行:
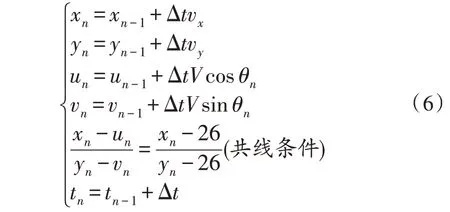
①压制干扰:采用微分步进的方式,利用压制通道对其压制,保证飞机Y、突防机群和预警雷达P 基本处于同一直线(压制通道内)。具体方法如下:设P5(xp,yp)为p 时刻突防机群的坐标位置,H5(uh,vh)为h 时刻远距离支援干扰飞机的坐标位置,Δt为一个极小的时间分量,由P5进入T3 区域起,令tn=tn-1+Δt,(x,y)为航迹H 上的点(直线与圆),令
②假目标干扰:需保证P5 到T 攻击线全程干扰机Y 都为有效干扰,即远程干扰机Y 从H5转弯后至的全过程中,始终能有效干扰雷达P,即,且可知当P5与S5重合时,可取得最短距离和时间,该过程示意图如图10 所示。
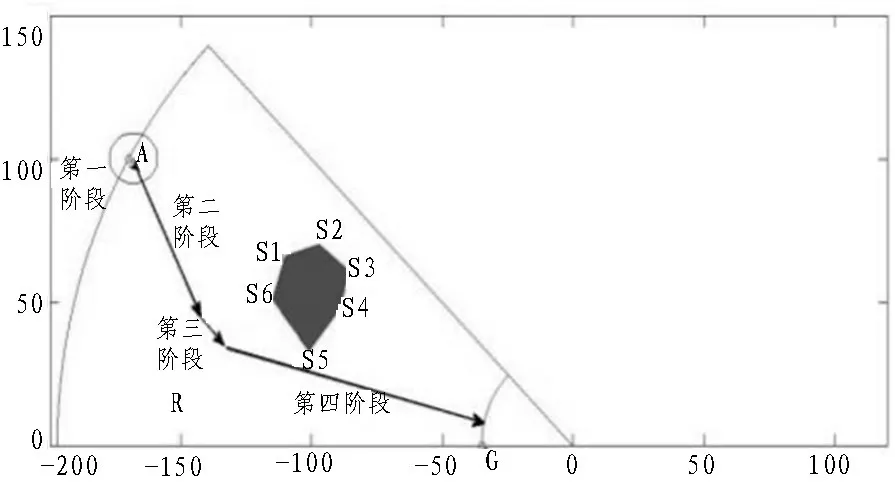
图10 方案一突击策略分段图
此时,满足条件如下:

根据P5T的路程范围,可反推的时间范围,选取一个合适的中间值,令,则可推得Hs在跑道下端的转弯点,Hs1为(-234.4,9.1) 。由式(11)以及Hs的限制条件可推出Hs在上端的转弯点,Hs2为(-162.6,182.4),Hs为近端的转弯点。
方案二:区域上方绕行
从区域S 上方绕行,意味着突防飞机群全程都在预警雷达的监控范围内,即远程支援干扰飞机必须能够全程干扰预警雷达P。
需满足条件如下:
①起点在远程干扰飞机Y的保护范围内;
②从Ps点进入S2PS5区域后,Y 在区域内的假目标扇面越来大,直至完全遮挡(Y 此时为逆时针方向飞行);
③突防飞机最终到达攻击线T 上的点T2,也在远距离支援干扰机Y的假目标扇区内(即满足∠S5PT2≤20°),应满足约束条件:

飞行策略如图11 所示。
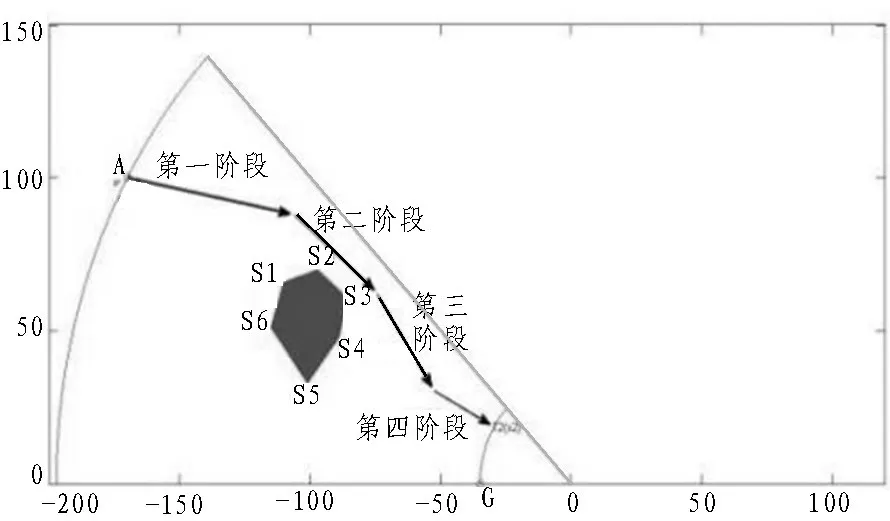
图11 方案二突击策略分段图
在∠S5PX2=20°时,可取得最优解如下:
机群到达X2时,干扰机到达H2,机群进入S2 时,对应远程干扰机的位置为Hs2,满足∠S2PHs2=20°。由各点之间的坐标关系可以解得Hs2坐标,从起点HA开始,共飞行了79.8 km,根据对应的速度关系,突击机群对应的飞行距离应为98.13 km,大于|S2X2|的值(|S2X2|为直线飞行距离,其值为85.54 km),由此可见,突击机群在此区域飞行轨迹为曲线。
由以上分析可知,此方案的最优解如下:从A 起点出发,通过S2 点后到达X2,∠S2PX2=20°,X2为攻击线T 上的点,其坐标位置为X2(-23.7,25.9),总飞行距离为164.467 6 km,花费总时间为604.67 s。
5 结论
在电子攻防对抗中,对确定的目标进攻时,是否能够预先获得充分的电子环境情报至关重要。在飞机突防过程中,突防速度是主要因素,而全面而有效的干扰掩护更是安全抵达的重中之重。现代战争不仅仅是武器攻防战,更是电子攻坚战,有效的情报分析、准确的决策战略是作战的制胜法宝。
猜你喜欢
作文小学高年级(2022年4期)2022-05-27
航天电子对抗(2019年4期)2019-12-04
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
中国交通信息化(2018年12期)2018-03-21
北京航空航天大学学报(2017年9期)2017-12-18
科技资讯(2017年18期)2017-07-19
作文周刊·小学二年级版(2016年45期)2017-07-18
军事运筹与系统工程(2016年4期)2016-07-10
现代兵器(2016年6期)2016-06-25
