一种基于激光点云提取断面数据的方法
2021-10-28 12:59:32张福友
水利规划与设计 2021年11期
张福友
(广东省水利电力勘测设计研究院有限公司,广东 广州 510170)
断面测量是对某一方向剖面的地面起伏进行的测量工作[1]。在水利工程建设中,断面测量是最常见的测量工作之一。断面测量一般有河道断面测量、堤防断面测量、水工建筑物断面测量、跨河桥梁断面测量等。传统的断面测量可采用水准仪、经纬仪、全站仪、GPS等进行测量,此类方法需要投入大量的人力物力,具有劳动强度高、工作效率低、安全系数低等缺点。
随着激光雷达测绘仪器的广泛应用,测绘作业模式发生了翻天覆地的变化。外业采集的海量激光点云数据完全满足断面制作的需求,但从海量点云数据里自动提取有用的信息极其困难。目前行业内有许多软件可以提取,但提取到的数据大部分不是水利行业断面成图所需的,无法快速完成断面数据提取和断面制作。
本文提出一种基于激光点云提取断面数据的方法,通过探索研究从海量点云数据中提取有用的信息,经过数据格式转换、坐标系转换、人机交互操作、数据反算等环节提取断面成图所需要的有效数据。
1 激光雷达
激光雷达 Lidar(Light Detection And Ranging) 是一种主动式的现代光学遥感技术,是传统雷达技术与现代激光技术相结合的产物。激光具有高亮度性、高方向性、高单色性和高相干性等特点。激光雷达具有角分辨率高、距离分辨率高、速度分辨率高、测速范围广、能获得目标的多种图像、抗干扰能力强等优点[2]。激光雷达工作时,由发射单元发射激光束,到达地物后反射回来被接收单元接收,计算发射和接收的时间差,根据光的传播速度算出传播距离,通过IMU/GPS单元的参数改正可以算出地物点的空间位置信息。机载激光雷达测量系统就是利用飞行器作为平台,搭载激光雷达作为测量设备,从空中对地面进行扫描测量,形成海量三维点云数据。激光点云具有数据密度大、数据精度高、植被穿透能力强、不受太阳高度角和阴影影响、隐蔽性好、抗干扰能力强、作业效率高等特点[3]。这些特点使得从点云数据里提取断面数据成为可能。
2 方案设计
2.1 格式转换
隶属于美国摄影测量与遥感学会(ASPRS)的 LIDAR 专业委员会于 2003 年发布激光雷达数据的标准格式LAS[4],本文针对LAS格式数据进行探讨。
LAS基本框架由公共头文件区、变长记录区、点数据记录区组成[5]。为了压缩存储空间,数据是由二进制方式存储的。在读取LAS格式数据时,根据公共头文件区的信息可找到点数据记录区所在位置,再根据不同版本的差异,准确找到坐标值,但该数据并非真实的地物坐标,需结合公共头文件里的比例因子和偏移量进行计算得出地物实际坐标值,计算公式如下:
(1)
式中,X0、Y0、Z0—偏移因子;XS、YS、ZS—比例因子;Xr、Yr、Zr—坐标记录值。获取所有点记录的实际坐标后将其输出为文档格式文件,如南方CASS的DAT格式文件、XYZ格式文件或COO格式文件等。
2.2 提取设计
首先将断面线布置好,在实际采点过程中,要求测点偏离该线的距离在一定范围内才符合要求。根据该要求,在提取范围的设计方面可以以断面线为中轴线,两边各偏移允许值得到两条平行线,将这两条平行线首尾相连形成封闭矩形,即提取范围,如图1 所示。
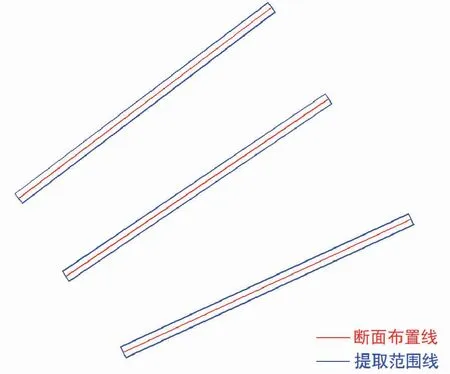
图1 提取范围设计示意图
假设断面布置线起点坐标为P1(X1,Y1),终点坐标为P2(X2,Y2),则经过该两点的直线方程表达式[6]为公式(2)和公式(3):
(2)
X=X1或X=X2(X1=X2)
(3)
假设偏移距离为L,则可以推导出该矩形四个角点A(XA,YA)、B(XB,YB)、C(XC,YC)、D(XD,YD)的坐标分别为:
(4)
(5)
(6)
(7)
然后,需将在范围线内的点导出以完成提取任务。判断点是否在范围线内,进行判断可用“射线法”[7],即从P点作一条水平射线,如P点在范围线内部,则该射线与范围线的交点必为奇数,如P点在范围线外部,则交点个数必为偶数(0也在内),如图2所示。该法也存在特殊情况:如水平射线经过其中某节点、水平射线与某条边重合或P点在某条边上等情况,此类特殊情况也可通过设置一些额外判断条件加以分析识别出来,在此不详细展开论述,该方法适用于凸多边形、凹多边形、自交多边形等各种情况。

图2 点与多边形位置判断示意图
2.3 垂直偏移
提取出来的点云是三维空间里的离散点集合,为了将点云转换为剖面坐标系,需要将所提取的点云偏移至同一个平面上,严格来讲是一个竖直面,这就需要将所有点垂直偏移至断面线上,假设点P的原始坐标为P0(X0,Y0),偏移后的坐标为PM(XM,YM),则有:
(8)
根据式(8),将所有矩形范围内的离散点经过偏移转换,所有点均被移至断面线上,如图3所示:
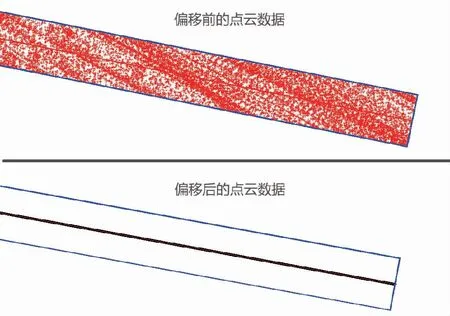
图3 偏移前后的点云数据示意图
2.4 坐标系转换
经过垂直偏移至断面线上的点云均处在一个垂面上,只需将该垂面转为平面(断面坐标系),即可非常直观地查看断面线上所有点云的横截面分布情况。为此,需要经过两次旋转,首先将点云的俯视图绕Z轴旋转至断面线成为一条水平线,如图4到图5的变换。然后以断面线为轴(断面线高程为0),绕该轴逆时针旋转90°即可,如图5到图6的变换。在此定义高程递增的方向(原Z轴)作为Y轴方向,断面线起点指向终点的方向作为X轴方向,断面线的起点为原点O,该坐标系即为断面坐标系。

图4 点云俯视示意图
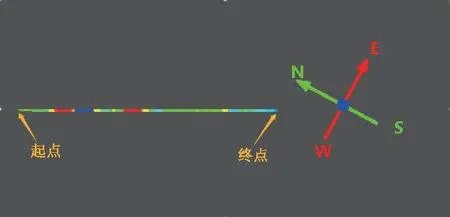
图5 绕Z轴旋转后示意图
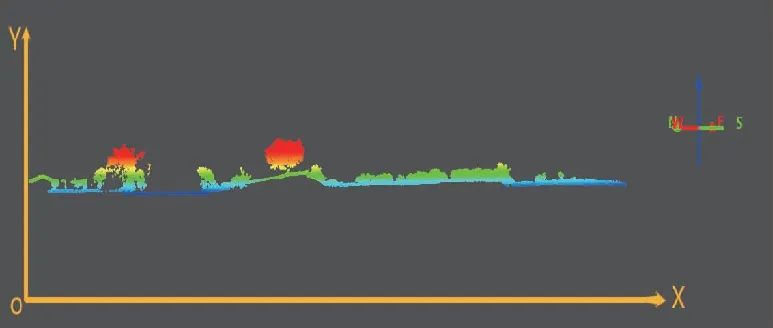
图6 绕断面线旋转后示意图
假设断面线上的某点Pd的三维坐标为(Xd,Yd,Hd),则推导转换后该点在断面坐标系上的坐标值为Pd′(Xd′,Yd′),计算公式如式(9):
(9)
2.5 人机交互
水利行业中的断面是某一地形沿某一条线段高低起伏变化状态的折线表示形式,所有数据准备就绪后便可进行人机交互操作,根据点云的横断面图绘制断面线[9]。在绘制断面时应避开建筑物、高压线、植被等地物点,贴着地表从起点开始到终点结束,按照比例尺要求进行综合与取舍[10]。如图7所示,上图为点云转换坐标系后的展点示意图,中图是根据点云的横截面图依照一定的规则绘制出的地形的断面线,下图是绘制后的断面线展示图。
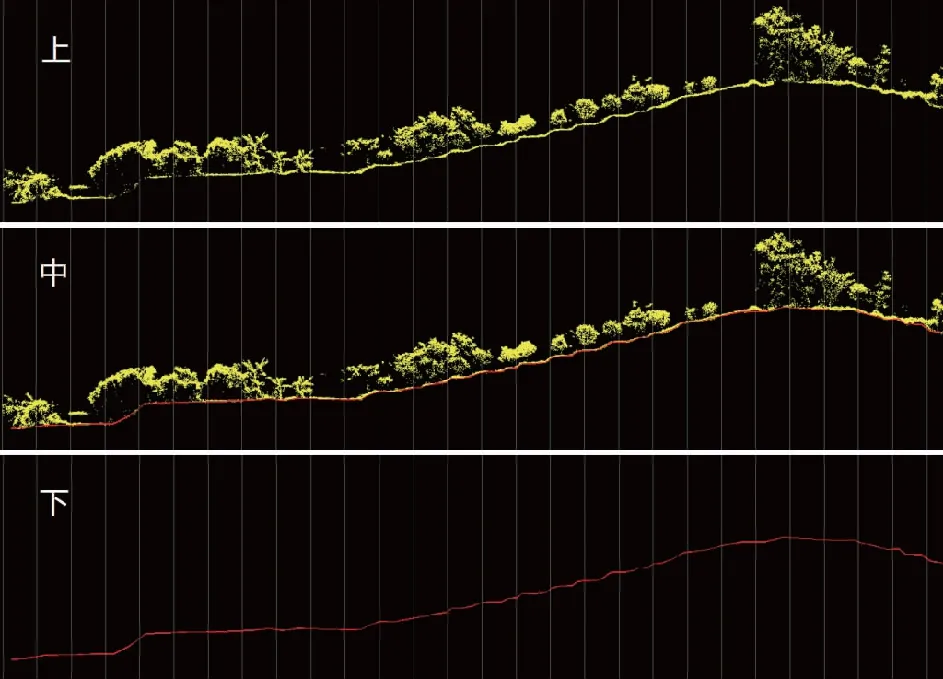
图7 断面线绘制示意图
2.6 数据反算
根据绘制好的断面线反算出所有断面点的实际坐标。断面线是多段线,每个节点代表一个断面点,推导从断面坐标转换为实际坐标的式(10)如下:
(10)
3 实例检验
广东省西江干流治理工程是列入《珠江流域防洪规划》、《珠江流域综合规划(2012—2030年)》和《全国水利改革发展“十三五”规划》的重大水利项目,也是纳入2020—2022年拟开工的重大水利工程建设清单项目。该工程治理范围为西江桂粤省界至思贤滘段,整治堤段总长65.2km,重建(加固)涵闸63座,工程估算总投资24.66亿元。工程任务是在现有防洪工程基础上,通过堤防加固、险工险段治理、穿堤涵闸建设等措施,提高西江干流两岸防洪能力,保障居民生命财产安全和经济社会的可持续发展。
为检验方法的可行性,采用该方法对广东省西江干流治理工程中某一堤围的激光点云数据进行处理并绘制断面线,将该断面线与工程中采用GNSS-RTK技术测的断面线进行对比。此次共检验21条断面,断面长度从100—450m不等,将生成的断面放置同一个坐标系上进行对比发现,大部分用该方法制作的断面和常规方法制作的断面基本重合,特别是植被、房屋较少区域,如图8所示。
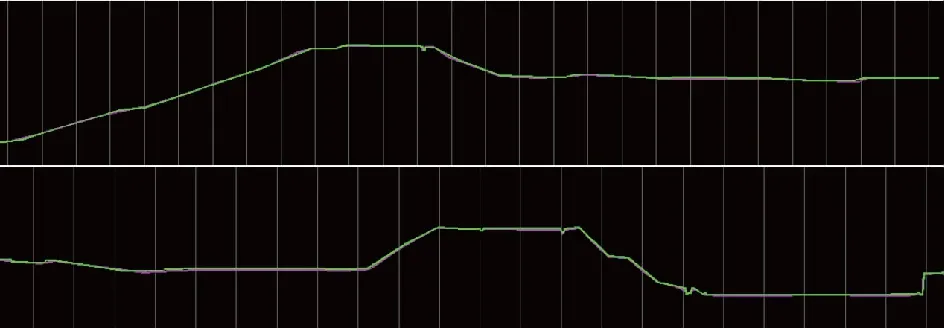
图8 断面对比图
但少部分数据也存在一些问题,如图9所示,某些细节部位会出现点云过少而导致断面细节缺失的情况,总结有四类:在图9(a)中,在高大植被底下,大部分点云被植被遮挡无法穿透而到达地物,该处缺失了加固坎顶等信息[14];在图9(b)中,在连片的灌木丛里,点云被严重遮挡而无法穿透,几乎没有点能到达地表而导致断面绘制有误;在图9(c)中,由于房屋的遮挡,导致在激光扫描的阴面缺失点云而无法还原细节部位;在图9(d)中,由于地物较小(约0.5米的方沟),点云密度不够而导致断面细节无法正确判断。
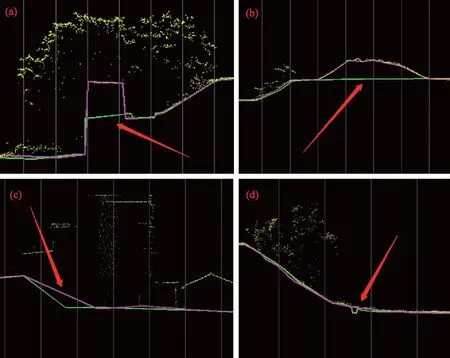
图9 误差较大部位示意图
出现图9中的问题根本原因是激光点云密度[15]不足,导致细节部位点云缺失,从而判断失误而造成断面线失真。为解决该问题,在激光点云采集时增加激光扫描重叠度、缩短航线间隔、降低飞行速度等以增大激光点云的密度,这能在一定程度上能减少此类问题的出现。部分困难区域,激光无法到达的可采用手持或背包式激光扫描仪[16]进行补充扫描,还可使用传统测量手段弥补。
根据该工程的实际情况统计,21条断面采用常规的测量方式外业需花费约3天时间、内业需1天时间。而采用该方法,外业激光点云采集只需半天时间,内业数据整理只需2小时即可。通过对比可看出,采用该方法可明显地提高生产效率,且无需人工采点测量,很大程度上降低劳动强度。
4 结语
本文提出一种基于激光点云提取断面数据的方法,并利用实际工程数据检验了该方法的可行性,分析和总结了该法的优缺点并提出了应对措施,对比分析了该法与常规方法的作业效率,在一定程度上能提高生产效率、减轻劳动强度,具有借鉴意义。
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02 17:36:34
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
数学小灵通(1-2年级)(2020年9期)2020-10-27 03:24:18
当代贵州(2019年41期)2019-12-13 09:28:56
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
童话世界(2018年17期)2018-07-30 01:52:02
中国共青团(2015年7期)2015-12-17 01:24:38
中国卫生(2014年9期)2014-11-12 13:02:00