多旋翼无人机智能采集诊断系统在库区巡检中的应用探讨
2021-10-27 11:14张曙云曾丽琼刘卓琦
中国水能及电气化 2021年9期
张曙云 曾丽琼 刘卓琦
(1.国网湖南省电力有限公司水电分公司,湖南 长沙 410007;2.国网湖南省电力有限公司长沙供电分公司,湖南 长沙 410007)
近年来,随着无线通信技术、GPS导航定位技术和自动遥感技术的快速发展,无人机在工业生活各个领域中得到广泛快速的应用,在电力线路巡检故障定位、山区防火救灾、工程地形测量等方面,与传统方式相比,在工作效率、安全保障、减少成本上有了很大的提高。国内外对无人机的应用进行了一系列的前沿性研究。文献[1]详细阐述了多旋翼无人机在库区水域环境监测中的应用情况,通过分析固定翼式及旋翼式无人机的优缺点,为不同微型多旋翼无人机系统使用提供典型流程;文献[2]通过对自主研发的大型无人直升机多传感器电力线路全自动巡检系统在广东电网应用及效果分析,验证了巡检结果的可靠性和无人机巡检的优势;文献[3]基于离散动作深度强化学习架构,提出了一种新颖的option-DQN(option-deep Q-learning)算法,实现了高效的无人机数据采集和路径规划,使无人机在执行任务时轨迹能自主学习优化,更清晰、合理并能判断无人机何时应充电。这些研究从理论到实践都对无人机的在电力、库区监控巡检中应用进行了大胆探索,取得了一定的研究成果。文献[4]提出了基于无人机的抽水蓄能电站巡检方案,通过采用互联网+无人机自动化巡检模式来改善巡检工作,具有十分明显的效果,但对于无人机的控制算法选择及数据处理处理方面没有给出明确方案。
本文提出在库区巡检中采用基于深度学习的多旋翼无人机巡检模式,同时通过大数据技术对数据信息进行深度挖掘,构建智能诊断系统,对异常情况开展检测诊断,自动产生实际环境状态诊断和评估结果,最终通过专业人员复查,实现对库区环境的远程监控、数据采集、综合诊断和评估分析,以自动化巡检替代传统人工模式,极大减轻人力工作强度,并保障工作安全。
1 系统总体构成
本文提出的基于深度学习的多旋翼无人机智能采集诊断系统的设计方案,在库区巡检中由基于多旋翼无人机深度学习算法的控制系统,以及多镜头数据图像采集、GPS定位/GPRS数据传输、地面信息站数据处理智能诊断系统等组成(见图1)。

图1 总体系统结构
在总体系统结构中,主要采用以太网网络来接收、控制连接框架内的各个结构。在数据采集方面,由多旋翼无人机搭载的全方位全景超广角摄像头、红外热像仪及激光雷达等数据采集设备,对库区的地形地貌、水位流量、水工建筑物等相应的图形及测量数据进行采集。由于5G通信技术的快速发展应用,采用GPRS无线通信技术快速地将采集信息传输到地面信息站服务器。服务器接收到信息之后将自动进行储存处理,通过建立智能诊断系统,对信息进行加工处理,引入数据挖掘算法,通过对采集的信息与正常状态进行自动比对诊断,生成异常情况分析报告,在Web管理终端能对整个系统数据及异常报告进行查看操作,同时也能操作无人机起飞控制平台对其发出控制指令,无人机接收端设备将接受并执行[5](见图2)。
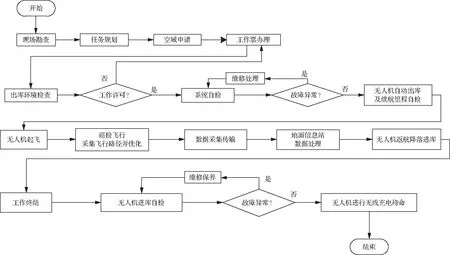
图2 系统巡检流程
通过方案实施能使工作人员对库区自然地形环境及水电厂附近水工建筑物的状态有一个直观、清晰的了解,可快速监测到异常情况及突发灾害的地点,提升整体的巡检效率和结果的可靠性。
2 基于深度学习的旋翼无人机巡检模式
2.1 多旋翼无人机设备原理
在应用无人机开展巡检工作时,为确保无人机能够顺利完成相关的巡检任务,要求无人机具备完善的功能和优良的性能,这直接关系到无人机的类型选择。多旋翼无人机成本低,便于维护,机体小,在巡航过程中飞行控制灵活;常见的多旋翼无人机有四旋翼、六旋翼、八旋翼,其最大特点就是具有多对旋翼,每对旋翼的转向相反,用来抵消彼此的反扭力矩,使控制更加精准,采集数据针对性更强,同时飞行比一般无人机稳定,在抗扰动和安全性方面更好。所以在库区这种山区环境中应用更具优势。
2.2 基于深度学习的多旋翼无人机
深度学习的概念由Hinton在2006年提出,深度学习是通过模拟人的神经网络,使其具备像人一样的学习能力,对目标进行不断的优化学习。目前深度学习算法已广泛应用于人工智能、模式识别和智能检测等领域,在多旋翼无人机飞行巡航定位路径选择过程中,需要综合大量数据信息,如天气情况、三维空间数据、风速等,这些数据结构复杂,综合处理分析难度大。深度学习能通过学习深层次非线性网络结构,来表征用户的海量数据,具有强大的从多旋翼无人机飞行数据信息库中学习数据信息本质特征的能力,从而进行深层次特征表示,通过自动特征学习,将不同数据映射到同一个隐空间中,以获得数据的统一表征。相对于传统的机器学习算法,深度学习突出从海量数据中进行学习,解决传统机器学习算法难以处理海量数据中存在的高维、冗杂以及高噪等的问题,使挖掘数据潜在特征更加方便快捷,能高效完成对多旋翼无人机采集到的数据的处理。
深度学习常用的算法有卷积神经网络(CNN)、循环神经网络(RNN)、生成对抗网络(GAN),见表1。

表1 三种算法的对比
由表1可知,采用深度学习中卷积神经网络算法,无人机能更好地实现自动规划路线,自动寻找目的地,并能在飞行过程中识别航行过程中长期不变的物体,通过采集定位、航线数据等信息,经过多次训练,实现高效的无人机数据采集和路径规划,使无人机能够进行自主巡航。
3 智能诊断系统的构建
3.1 系统架构
系统采用SOA(Service-Oriented Architecture,面向服务的架构)技术架构,基本架构主要由异常指标专家库、实时监测与智能诊断和Web应用三部分组成[6](见图3)。

图3 系统功能构架
智能诊断系统的功能实现通过两个步骤:第一,通过对无人巡航采集传输回地面信息站中的图像数据等信息进行存储并实时分析,将信息展示到Web管理终端,供工作人员对现场环境的在线监控;第二,将实时采集到的数据信息与数据库中原有的数据信息进行对比,反映环境状态的变化,通过事先设置的判别标准,进行自动诊断并得出环境状态评价结果。
3.2 智能诊断分析流程
通过对无人机采集到的图形数据等信息进行大数据挖掘分析,将日常巡检中的异常情况处理方法和水库库区环境状态参数正常变化情况建立在专家数据库系统中,通过将采集到信息与数据库中所设定的标准参数进行比较,对存在的异常情况进行快速判断和分析(见图4)。
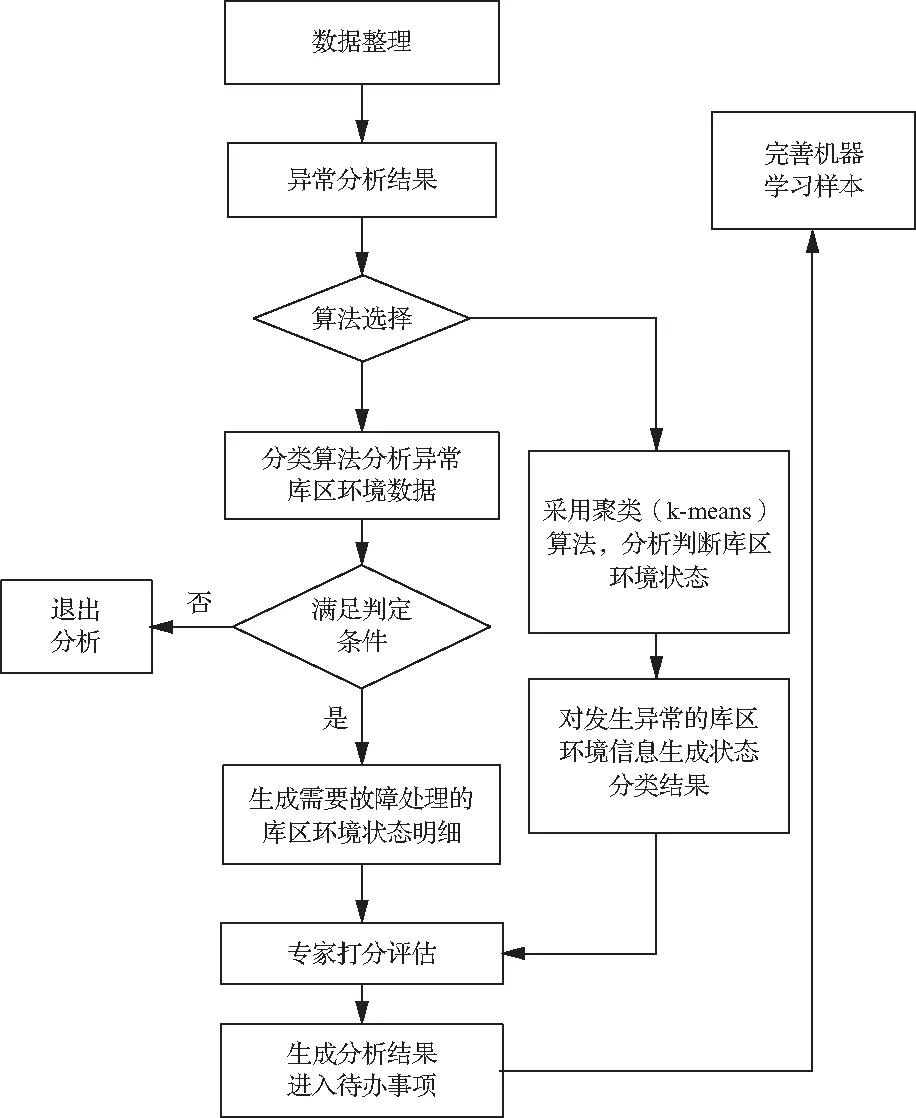
图4 智能诊断分析流程
将专家数据库系统中数据信息作为机器学习样本,采集系统的统计数据进行机器学习,创建库区环境状态评估、异常情况定位、采集异常等分析诊断模型,并由分析诊断模型对采集数据进行验证,快速锁定异常区域,并得到库区环境整体状态诊断评价结果。通过其中的算法取得分析结果,根据库区环境良好状态下的图像数据信息设定专家打分评估规则表,从而实现根据采集的数据信息判断出库区环境的整体状态,并对其进行分析和评价打分。
4 结 语
无人机在军事、民用、工业、农和服务行业等各领域得到了广泛的应用,通过对无人机进行深入的研究与分析,提出了一种基于深度学习的多旋翼无人机智能采集诊断系统设计方案,从基于深度学习的多旋翼无人机巡检模式和智能诊断系统构建两个方面对方案进行了详细分析和叙述,并对多旋翼无人机应用优势进行了详细介绍,通过对深度学习中的基本算法进行对比分析,选择出了更适合的控制算法,并构建出相应的系统控制设计流程与架构,为实际应用提供参考,与采用传统的人工巡检方式相对比,任务完成效率高,能实现智能化巡检,在恶劣环境中有更强的适应能力,具有广阔的推广应用价值。fffff4
猜你喜欢
当代水产(2022年8期)2022-09-20
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
铁道通信信号(2019年8期)2019-10-10
电子制作(2019年9期)2019-05-30
测控技术(2018年9期)2018-11-25
北京航空航天大学学报(2016年8期)2016-11-16
现代语文(2016年21期)2016-05-25
新疆钢铁(2015年2期)2015-11-07
大众考古(2015年7期)2015-06-26