基于Virtuoso3D 的大面积弱纹理区域空三计算研究
2021-10-27 05:52:04曹建军
城市道桥与防洪 2021年9期
曹建军
[上海市政工程设计研究总院(集团)有限公司,上海市 200092]
0 引言
近年来,随着无人机倾斜影像测量硬件设备和内业数据处理平台的发展,实景三维模型建模在测绘领域、CIM、GIS 领域得到了广泛的应用。国内外学者对倾斜摄影多视角影像进行实景三维模型重建做了大量的研究工作。李卉[1]利用无人机搭载非量测数码相机,采用一整套设计方案,为基于多旋翼无人机进行倾斜摄影测量构建三维模型的方法提供了验证,表明此方案的可行性。还原了建筑物侧面纹理,构建三维模型。曲林等人[2]利用无人机自制镜头获取倾斜摄影数据,应用Inpho、Pix4Dmapper、街景工厂等软件进行实景三维建模的方法。除总结研究成果外,还对无人机实景三维建模的应用领域进行了探讨,为智慧城市的三维系统建设提供新的解决方案。王丙涛等[3]在总结了三维建模技术流程的基础上,提出倾斜摄影三维建模成果的精度与质量水平检测方法,在一定程度上为倾斜摄影三维建模技术规范和模型数据标准提供了参考与借鉴。周小杰等[4]利用无人机倾斜摄影技术实现免调绘的大比例尺地形图测绘方法。
空中三角测量(简称空三测量)作为倾斜摄影测量过程的重要环节,其成果质量直接决定着最终产品的数学精度,目前对于空三测量的优化尚缺乏深入研究。作为空三加密中的重要内容,相对定向精度对空三成果质量至关重要。当前数字摄影测量中对地面目标的自动识别与提取主要依赖于对影像结构与纹理的分析[5],在雄安新区植被、防尘网密集,弱纹理区的空中三角测量精度难以控制,严重影响了空三测量加密和实景三维模型构建的精度。现根据实际项目经验,以Virtuoso3D 倾斜摄影三维建模系统为基础,介绍空三测量加密的操作方法,分析弱纹理区域空三测量中的常见问题并提出相应的解决方案,提高弱纹理区域空三测量精度,提高弱纹理区域实景三维模型构建精度和效率。
1 空三测量
1.1 空三测量原理
在无人机倾斜摄影测量内业数据处理过程中,空三测量是指利用五镜头相机连续拍摄的具有一定重叠度的航摄像片,根据像片曝光时的外方位元素和一定数量的野外实际测量像控点,以数据后处理方法解算获取加密点的平面坐标和高程。
在Virtuoso3D 中,空三测量是自动完成的。软件广泛采用机器视觉普适性算法搜索相似影像,配合基于摄影测量的严密解算方式,在减少匹配次数的同时充分提升空三成功率和精度,有效解决空三连接点分布不均、断裂、分层等问题,自由网之后的精转点遵循由粗到精的原则分层迭代获得可靠的空三成果,以供后续实景三维模型重建使用。
空中三角测量是实景三维模型构建过程中的一个重要环节,通过空三加密计算出大量的连接点,利用这些连接点构建不规则三角网TIN,生成实景三维模型的基本框架,将三维模型白膜和表面的纹理信息进行自动映射,从而获取具有真实、自然纹理的高分辨率实景三维模型[6]。
1.2 Virtuos o3D 空三测量操作步骤
Virtuoso3D 空三测量包括以下步骤:
(1)外业数据整理。根据测区范围选择影像、POS数据、像控点数据。
(2)影像导入。在新建工程导入影像数据,并添加POS。
(3)提交自由网空三测量任务。影像、POS 数据导入完成并检查无误后,进行自由网空三测量任务提交。
(4)刺像控点。自由网解算通过后,将野外实际测量的像控点坐标,按照实际位置刺到像片上。
(5)提交控制网空三测量任务。控制点刺点完成并检查无误后,进行控制网空三测量任务提交。
2 弱纹理区域空三测量优化实例分析
2.1 航摄区域概况
航测区域位于容东片区,测区面积约7 km2,地形起伏落差较小,测区房屋密度小、楼层低,拆迁与施工场地较多,植被与防尘网等弱纹理区域面积比重大,见图1 所示。
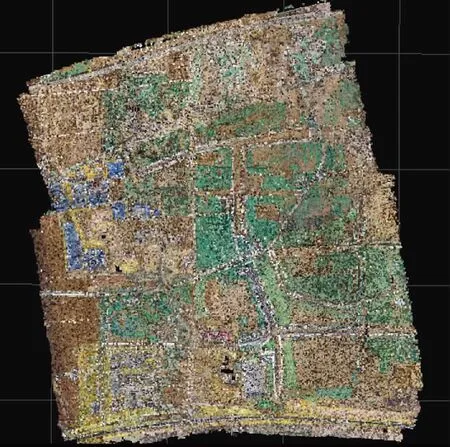
图1 航摄区域植被、防尘网概况之图示
2.2 数据采集
容东片区使用科威泰六悬翼无人机搭载睿博五镜头倾斜相机进行数据采集,共进行了20 架次航高为80 m,航向重叠度为85%,旁向重叠度80%,获取像片165 000 张,影像分辨率1.5 cm。测区内共布设像控点110 个,坐标系统为CGCS2000,分布见图2所示。
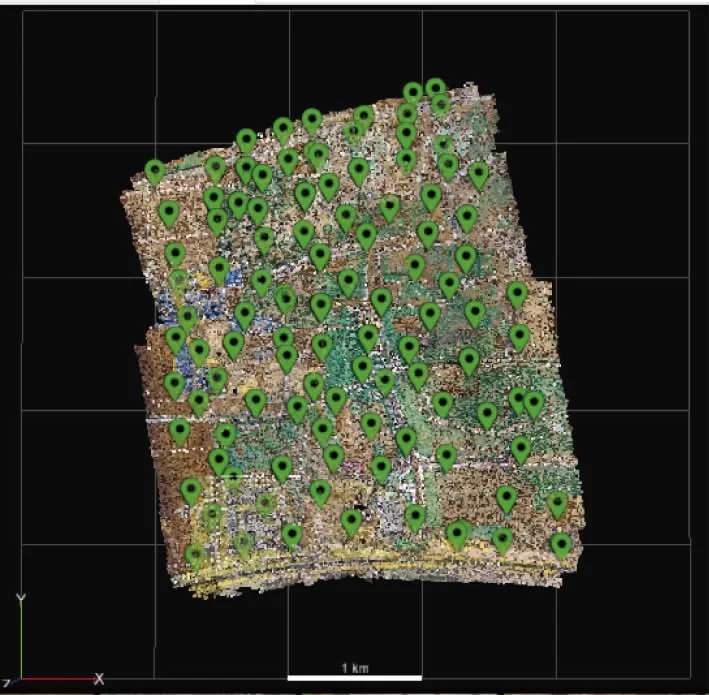
图2 航摄区域像控点分布之图示
2.3 优化方法
空三测量是实景三维建模构建的基础,其精度直接影响后续三维建模成果的质量,因此对大面积弱纹理区域空三测量进行质量控制尤为重要。影响空中三角测量加密精度的因素有多种,现主要针对影像与POS 质量、像控点布设、内业刺点精度、空三测量算法等影响因素,提出关于弱纹理区域空三测量质量控制的方法。
2.3.1 影像与P OS 质量
影像与POS 数据的质量直接影响空三测量加密的精度。影像清晰、色调一致、层次鲜明、色彩反差合理、色调柔和;影像无缺陷、错位、重影、不清晰和位置偏移等情况;像控点标志所在的影像清晰;影像无阴影、大范围反光、不清晰点等突出问题。POS 数据正确,记录完整,与影像数据一一对应。
2.3.2 像控点布设
像控点通常选择在明显、易于识别、位置固定且便于量测的地方。根据测区弱纹理区域面积大的实景情况,采用的像控点样式为白色和红色两个顶角相对的直角等腰三角形,大小以100 cm×100 cm的正方形,如图1 所示。像控点之间的布设间隔为200 m~300 m,布设方案如图2 所示。
2.3.3 刺点准确度
不同内业工作人员的刺点准确度存在差异,为保证刺点精度,该项目采用一人刺点模式。刺点过程中尽量选取像控点位置相对居中、无变形且无遮挡的影像进行刺点,减少影像畸变带来的影响。
2.3.4 空三测量算法
大面积植被、防尘网等弱纹理区域在航拍过程中会出现在多张连续影像中,存在特征点不明显或者缺失现象。因此,Smart 3D、Context Capture 等基于多视影像进行大量特征点计算提取,对获取的特征点采用多基线多特征匹配技术自动匹配同名点,然后采用光束法区域网平差方法进行整体平差计算的软件在空三计算过程中容易出现连续弱纹理像片不参与运算的问题。
该项目采用Virtuoso3D 进行空三计算,软件采用机器视觉普适性算法,配合基于摄影测量的严密解算方式,在减少匹配次数的同时充分提升空三成功率和精度,有效解决空三连接点分布不均、断裂、分层等问题,自由网之后的精转点遵循由粗到精的原则分层迭代获得可靠的空三成果。
3 空三计算精度分析
对容东片区外业采集数据先后采用Context Capture 与Virtuoso3D 进行空三计算处理。
在Context Capture 中,由于算法和设备性能局限,空三计算的区块按像控点分布情况和像片数量划分。各区块之间采用公共像控点进行连接,单个区块像片在15 000 张左右,共划分为9 个空三计算区块。经过多次空三计算,人工加入连接点,但仍有6个区块的空三计算结果出现多幅影像不参与运算、分层、像控点平差精度超限等问题,无法完整构建航摄区域实景三维模型(见图3、图4 所示)。

图3 弱纹理影像空三计算分层之图示
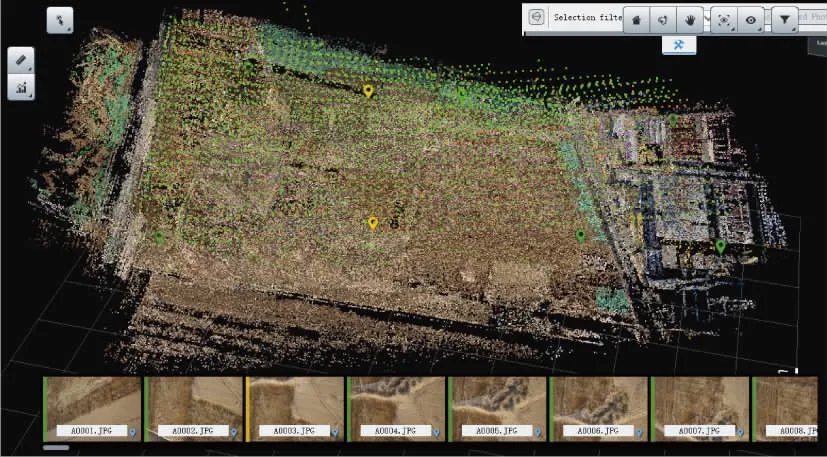
图4 弱纹理区块空三计算结果不达标之图示
在Virtuoso3D 中,为了最后建模合区时不会出现空洞,分区的时候需要考虑区域间影像有所重叠,因此按飞行架次分区。航摄区域共划分为6 个空三计算区块,全部区块自由网空三计算一次通过,控制网空三计算一次通过。将控制网空三结果导入到Context Capture 中进行合并。空三区块计算结果合并情况如图1 所示,文章截取了部分像控点的精度分析报告,见图5 所示。
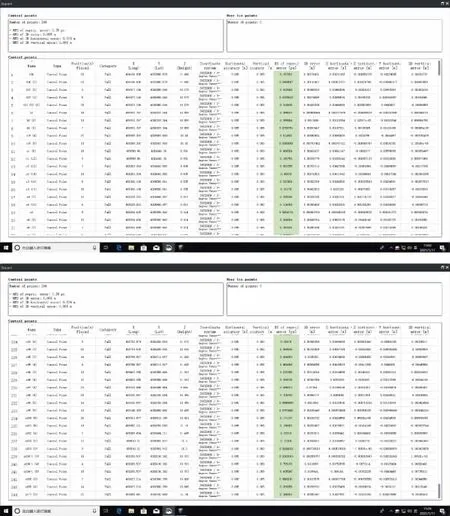
图5 部分像控点精度分析报告之图示
经过Virtuoso3D 处理过后,出现少量弱纹理影像未参与计算的情况,空三计算结果未出现分层,像控点投影误差均在一个像素内,精度符合要求。实践结果表明,Virtuoso3D 的影像匹配效果更好,航带间相邻影像都匹配上同名点,在未进行人工选取同名点的情况下,Virtuoso3D 同样能更好地匹配同名点,能大大提高计算机自动连接点效率,提高空三计算的通过率,节约空三计算时间。
4 结语
空中三角测量是无人机倾斜摄影测量内业数据处理过程中的一道重要工序,是决定最终建模成果精度的关键因素。在空三计算常规操作过程中,严把质量关,避免误差积累,并针对大面积弱纹理区域空三计算难的问题采取有效的解决措施,才能保证空三测量的精度和质量。本文以容东片区的无人机倾斜影像测量数据为例,针对大面积植被、防尘网等弱纹理区域,特征地物点少,常规影像匹配效果不理想,存在诸多错点,严重影响空三加密的精度。利用Virtuoso3D 软件进行空三测量计算,从像控点精度结果可以看出,此套方法能有效提高空三测量精度和效率。在廉价航空摄影条件下,在各类客观条件不利的情况下,摸索出适合此类大面积弱纹理地区空三加密的方法。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
西部论丛(2019年9期)2019-03-20 05:18:04
戏剧之家(2018年27期)2018-12-10 11:21:56
文艺生活·中旬刊(2018年7期)2018-09-28 10:24:16
企业科技与发展(2018年5期)2018-09-10 00:20:39
中文信息(2017年6期)2017-06-30 08:25:36