基于弹性势能的多模数直齿轮副接触应力分析
2021-10-27 10:15:08朱增宝龚明针王东雨鲍和云朱如鹏
安徽理工大学学报(自然科学版) 2021年3期
朱增宝,龚明针,王东雨,鲍和云,朱如鹏
(1.安徽理工大学机械工程学院,安徽 淮南 232001;2.南京航空航天大学直升机传动技术重点实验室,江苏 南京 210016)
渐开线齿轮广泛应用于航空航天、船舶车辆和工程机械等领域,齿面接触应力是影响其接触疲劳破坏的主要因素,同时也是衡量与评估齿面接触承载能力的重要条件。文献[2-3]使用赫兹接触理论来评估接触应力,假定载荷沿接触线均匀分配,并引入了几种载荷分配影响因素来校正接触应力的计算值。实际上,载荷分布取决于齿轮副接触点的啮合刚度,刚度在任何接触点都不同,这意味着每单位齿宽的载荷在接触线的任何点上也都不同。有许多研究通过理论计算法、实验和有限元分析等多种方法确定了直齿轮副的载荷分配比。
以上研究都是针对主、从动轮模数相等的齿轮副。对于主、从动轮模数不相等,但满足法节相等啮合条件的齿轮副(简称多模数齿轮副)的齿面接触应力研究,目前鲜见相关报道。
基于此,本文根据理论齿侧间隙为零原则,推导了多模数渐开线直齿轮副的啮合角计算公式。引入渐开线齿廓参数,结合赫兹理论模型和基于最小弹性势能的载荷分配模型,推导多模数齿轮副的齿面接触应力公式;分析了模数比对多模数齿轮副接触应力的影响,为多模数啮合齿轮传动设计提供参考。
1 多模数直齿轮副无侧隙啮合方程
1.1 齿轮副正确啮合条件
渐开线直齿轮正确啮合条件
m
cosα
=m
cosα
(1)
式中:m
、m
和α
、α
分别为主、从动轮的模数和压力角。为便于下文描述,把从动轮2的模数m
与主动轮1的模数m
之比称为模数比δ
,计为δ
=m
/m
。1.2 齿轮副无侧隙啮合方程
在无侧隙啮合情况下,主动轮沿节圆的齿厚s
等于从动轮沿节圆的齿槽宽度w
。同样的,对于满足正确啮合条件的多模数渐开线直齿轮副而言,亦有s
=w
(2)
式(2)中,s
和w
按下式计算
(3)
式(3)中:α
为将要计算的多模数渐开线齿轮副啮合角;z
、z
分别为主、从动轮齿数;x
、x
分别为主从动轮的变位系数;r
1、r
2分别为主、从动轮的节圆半径,mm,计算公式由文献[13]得
(4)
将式(4)代入式(3)再代入式(2)整理并化简得多模数渐开线直齿轮副无侧隙啮合方程为

(5)
2 载荷分配模型
2.1 齿廓参数
文献[7]详细介绍了最小弹性势能的载荷分配模型。弹性势能是根据弹性理论和齿轮齿形参数计算得出,单位载荷和单位齿宽的势能(单位势u
)取决于接触点,主动轮齿廓上的接触点齿廓参数ξ
为
(6)
式中:z
为主动轮齿数;r
1为主动轮基圆半径,mm;r
1为主动轮在接触点处的半径,mm。该参数具有物理意义:它是接触点处的曲率半径与基圆齿距之比,也是接触点的滚动角与齿距圆心角2π/z
之比。2.2 载荷分配
在考虑同时接触的所有成对齿的情况下计算弹性势能,其中作用在每对齿上的负载计算公式由文献[7]得
(7)
式中:F
(ξ
)和v
(ξ
)为某对齿i
发生接触时的齿廓参数ξ
对应的负载和逆单位势,F
是传递的总载荷,n
为啮合齿对数。据此,载荷分配率R
(ξ
),即所考虑的一对齿i
所承受的负载比率为
(8)
于是,对于渐开线直齿轮,沿齿廓方向接触点处的单位齿宽长度的载荷f
(ξ
)为
(9)
式(9)中b
为齿宽,mm。式(8)中,v
(ξ
)由文献[7]中的方程表示,即ν
(ξ
)=cos[b
(ξ
-ξ
)](10)
式(10)中
ξ
=ξ
+ε
/
2(11)
(12)
关于逆单位势v
(ξ
)作如下说明:一是式(11)中ξ
为啮合起始点的齿廓参数,此处要求从动轮齿顶与主动轮齿根的啮合点必须处于啮合区间之内,即不存在轮齿变形或加工而产生的线外啮合情况;二是ε
为多模数齿轮副重合度,计算公式由文献[14]得
(13)
式中:α
1、α
2分别为主、从动轮的齿顶圆压力角。将式(10)代入式(8),可得到各齿廓接触点所承受的载荷比例,该比例沿齿廓接触点呈线性关系,单齿啮合区间和双齿啮合区间所承受的载荷比例表达为式(14)的形式,即
(14)
(15)
式(15)中:ξ
为啮合终点的齿廓参数,r
1为主动轮的齿顶圆半径,mm。其中,[ξ
,ξ
-1]和[ξ
+1,ξ
]表示双齿啮合区间;[ξ
-1,ξ
+1]表示单齿啮合区间。此外,区间下限ξ
-1表示单齿啮合内点齿廓参数,区间上限ξ
+1表示单齿啮合外点齿廓参数。3 多模数直齿轮接触应力计算公式推导
3.1 赫兹公式
由文献[13]知赫兹理论公式
(16)
式中:σ
为齿面接触应力,MPa;F
为齿轮名义法向载荷,N;L
为接触线长度,mm,且与重合度有关;Z
、ρ
为式(17)~(18)。
(17)
(18)
式中:Z
为弹性影响系数,MPa;ρ
为综合曲率半径,mm;μ
、μ
分比为主、从动轮材料的泊松比;E
、E
分别为主、从动轮材料的弹性模量,GPa;ρ
、ρ
分别为主、从动轮在接触点的曲率半径,mm。3.2 多模数直齿轮副接触应力公式推导
以赫兹公式为基础推导适应多模数渐开线直齿轮副啮合特点的齿面接触应力计算公式,过程如下。
由文献[14]知主、从动轮在啮合节点的曲率半径之和d
为
(19)
于是根据齿廓参数的物理意义和式(19)得到多模数齿轮副齿廓参数之和λ,即

(20)
式中:ξ
为从动轮在与主动轮相接触时对应的齿廓参数。根据齿廓参数物理意义得多模数齿轮副的主、从动轮的曲率半径ρ
(ξ
)和ρ
(ξ
)分别为
(21)
将式(21)代入式(18)得到以齿廓参数为变量的综合曲率半径函数ρ
(ξ
)
(22)
考虑到重合度ε
的影响时,由文献[4]得齿向接触线长度L
为
(23)
式中:Z
为重合度系数,由文献[4]得
(24)
某对齿法向载荷F
为FR
(ξ
),则某对齿单位接触线长度上的法向载荷F
/L
为
(25)
将式(22)和式(25)代入式(16)并整理得到多模数渐开线直齿轮齿面接触应力计算公式,见下式

(26)
4 多模数齿轮副齿面接触应力分析
4.1 算例参数设置
本文渐开线齿轮材料:齿轮的材料为20CrMnTi,表面渗碳淬火处理,齿面硬度HRC 57~63,弹性模量E
为206GPa,泊松比ν
为0.3。齿轮副基本参数设置如表 1所示。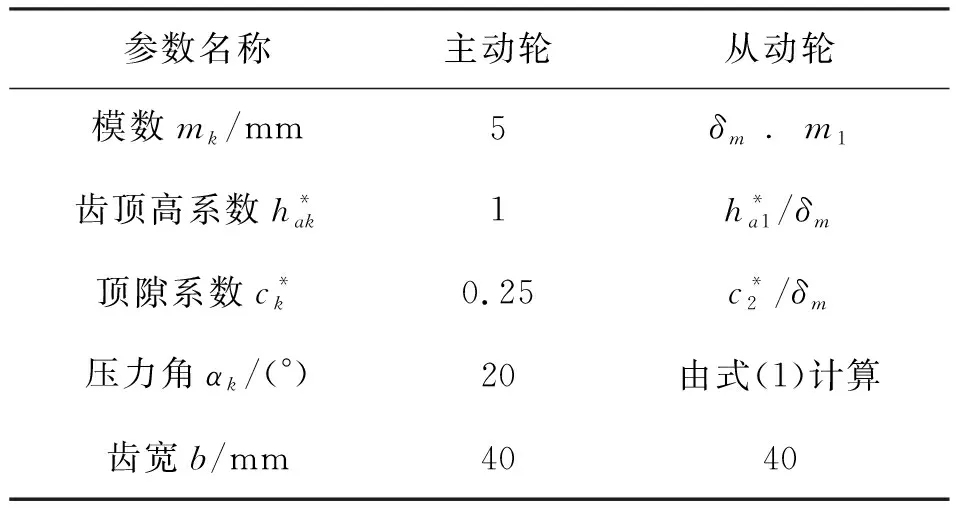
表1 齿轮副相关参数
由式(1)易知,从动轮的分度圆压力角α
随着模数比的增大而增大,易出现齿顶变薄、加载时容易断齿的现象。根据文献[16]可知,工程实际应用齿厚通常要大于0.25~0.4倍的模数,本文中取模数比时均以0.25倍模数为最小齿厚限制,因此本文模数比上限可取到1.08~1.1。为使从动轮的分度圆压力角不小于20°,本文中模数比下限取为1.0。4.2 主动轮齿数较少时齿面接触应力分析
现以主动轮转数为4 000r/min, 传输功率为150kW, 主动轮齿数为17, 从动轮齿数为52的齿轮副带入式(26)取模数比分别为1.0、1.02、1.04、1.06、1.08进行齿面接触应力计算,得到各模数比的齿面接触应力情况如图1所示。
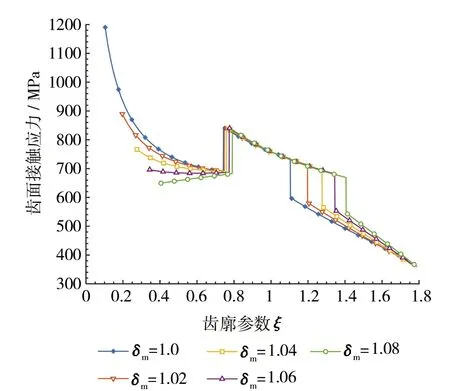
图1 主动轮齿数较少时齿面接触应力
由图1,当齿轮副齿数比较大且主动轮轮齿较少时,齿面接触应力的最大值并没有出现在单齿啮合内点附近,而是出现在啮合起始点。因此,并不能将单齿啮合内点的齿面接触应力计为最大值,而应比较单齿啮合内点和啮合起始点处应力值的大小。
对于啮合起始点附近的齿面接触应力会异常大的现象,本文从综合曲率半径的角度来说明。由式(22)可知,当齿廓参数值ξ
非常小时综合曲率半径ρ
(ξ
)值较小,从而通过计算得到的齿面接触应力较大。从图1可以看到,模数比的改变正是增大了ξ
才使得小齿数齿轮啮合起始点的齿面接触应力减小。因此,采取多模数啮合形式用于齿轮副齿数比较大且主动轮轮齿较少的情况可以有效的减小啮合起始点的应力。4.3 主动轮齿数较大时齿面接触应力分析
现以主动轮转数为4 500r/min,传输功率为450kW,主动轮齿数为29, 从动轮齿数为101的齿轮副带入式(26)取模数比分别为1.0、 1.02、 1.04、1.06、1.08、1.1进行齿面接触应力计算,得到各模数比的齿面接触应力情况如图2所示。
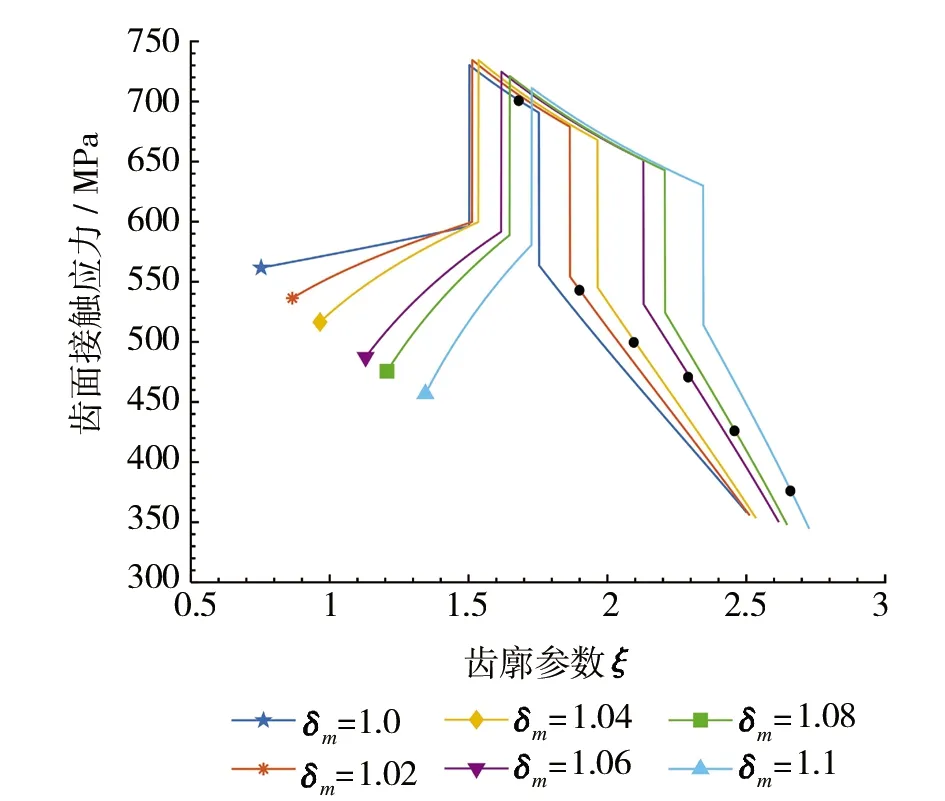
图2 主动轮齿数较大时齿面接触应力
对比主动轮齿数较少时的情况可以发现:当主动轮齿数较多时,齿面接触应力较大的点出现在单齿啮合内点;随着模数比的增大,啮合起始点的接触应力有较大幅度的降低,这也要得益于增大了模数比的缘故。因为,模数比的增大使得啮合起始点齿廓参数值ξ
增大,增大了该点的综合曲率半径,从而降低了齿面接触应力。4.4 节点的接触位置和接触应力分析
通过对主动轮节圆半径的计算,利用式(6)很容易得到节点在接触线上的位置,也很容易计算节点所在位置的接触应力。本文发现,当模数比处于某一范围时,多模数齿轮副节点会处于双齿啮合区,如图2圆点标示。通过计算单齿啮合区外点齿廓参数ξ
和节点齿廓参数ξ
,可以发现,当模数比δ
≥1.014 3时有ξ
≥ξ
=ξ
+1,也就是说节点已经处于双齿啮合区了。齿轮副参数(如齿数)会影响多模数齿轮副节点位于双齿啮合区的临界模数比值,例如主动轮齿数为17,从动轮齿数为52时,在没有变位的条件下,只有当δ
≥1.068 7时,节点才能处于双齿啮合区。如图2圆点标示,当模数比δ
=1.0时—齿轮副节点位于单齿啮合区—节点附近为单对齿受力,接触应力值约为700MPa。当模数比δ
分别为1.02、1.04、1.06、1.08、1.1时—齿轮副节点位于双齿啮合区—节点附近为两对齿受力;随着模数比的增大节点应力降低得非常明显,当模数比δ
=1.1时,节点接触应力值小到400MPa以下,节点的接触应力变化量为48.6%。对于使用最多的压力角为20° 的渐开线非变位同模数直齿轮副来说,在节圆附近只有一对齿啮合,节点附近的齿面承受了全部载荷。在绝大多数情况下齿轮的点蚀发生在节圆附近的齿面上。因此,若节点位于两对齿啮合区内,减小易产生点蚀部分的载荷,点蚀便不易产生。从这一角度考虑,本文改变齿轮副模数比使节点位于双齿啮合区的啮合传动方法是有益的。
5 模数比对最大齿面接触应力的影响
在实际齿面强度的校核计算中,最关心的还是沿接触线的最大齿面接触应力。为找到模数比对最大齿面接触应力的具体影响,先后对下列两组齿轮副: 第一组:z
=25,z
=40; 第二组:z
=25,z
=85进行不同模数比下的最大齿面接触应力计算,结果如图3所示。需要说明的是图3两组齿轮副的传递功率有所不同,但是这并不影响其变化趋势。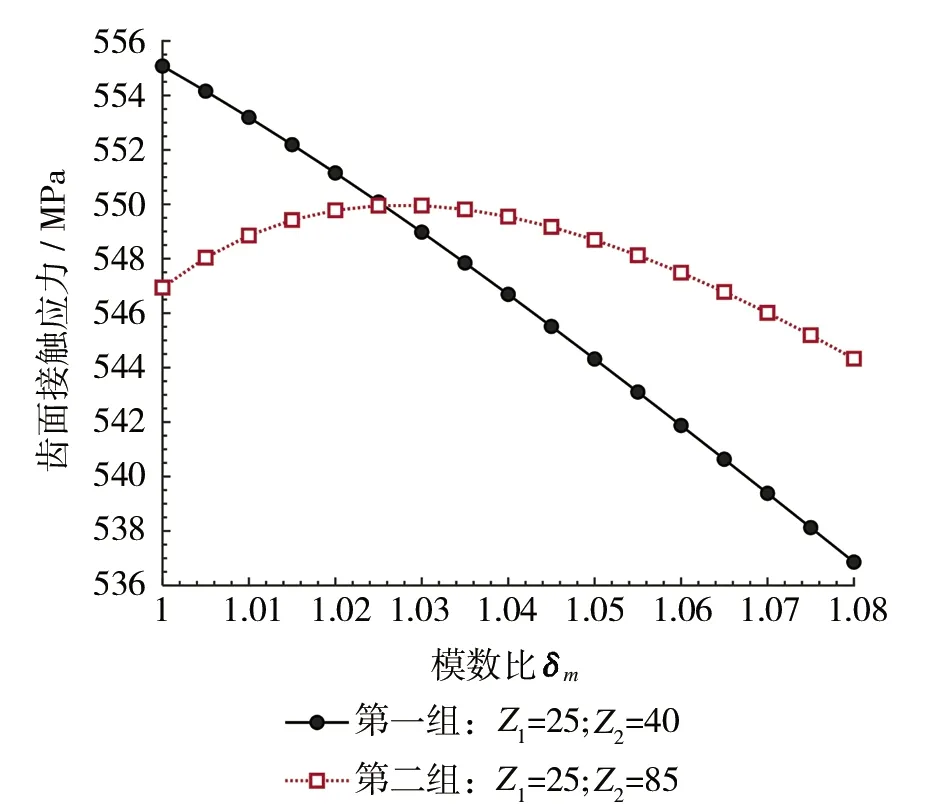
图3 最大齿面接触应力随模数比的变化
由图3可以看出,在第一组齿数条件下,随着模数比的增大,齿轮副最大齿面接触应力有所降低而且是持续降低。在第二组齿数条件下,最大齿面接触应力有一个先增后减的趋势;当模数比δ
=1.03时达到最大,δ
=1.08时达到最小。结合图2和图3可知,模数比改变了齿轮副齿形参数,随之改变的是齿廓参数,从而改善最大齿面接触应力。单从齿面接触应力这一点来说,模数比越大接触应力总体有降低的趋势。6 结论
(1) 渐开线直齿轮齿面接触应力较大的位置不总是出现在单齿啮合内点附近;当齿轮副齿数比较大且主动轮轮齿较少时,齿面接触应力较大的位置便出现在啮合起始点附近。
(2)当齿轮副齿数比较大且主动轮轮齿较少时,主动轮齿根附近的接触应力会异常的大,若采取多模数啮合形式增大啮合起始点综合曲率半径从而减小了该点接触应力。
(3)多模数直齿轮副可以通过改变齿轮副模数比使节点位于双齿啮合区,从而使节点附近承受的接触压力显著降低。
(4)在一定的齿数条件下,齿轮副最大齿面接触应力随着模数比的增大而有所减小。在齿轮系统设计中采取多模数啮合形式可改善接触应力。