无人机复垦区植被覆盖度提取方法优选
2021-10-27 10:12徐云飞张世文
安徽理工大学学报(自然科学版) 2021年3期
徐云飞 ,张世文,夏 可,周 际,程 琦
(1.安徽理工大学空间信息与测绘工程学院,安徽 淮南 232001;2.安徽理工大学地球与环境学院,安徽 淮南 232001;3.自然资源部国土整治中心,北京 100035)
矿产资源是国家经济发展的物资基础,是社会发展的重要推动力。各类矿山开采带给国民经济利益的同时,也给生态环境造成极大影响,如:长期开采造成地面塌陷、局部地区积水、土地荒芜、水土流失等问题,因此需对开采后的矿区进行生态修复。据相关资料统计,我国近几年的复垦率不到30%,而国外复垦率高达65%,对于中国这个人均资源相对匮乏的国家,仍需加强复垦工作,以达到保护生态环境、促进社会和谐的目的。
矿区生态修复常用手段为充填复垦,即改良土壤基层后种植植被,是最方便、成果最直观的方法,其复垦结果评价可以选用植被覆盖度作为一种定量指标。植被覆盖度(Fractional vegetation cover,FVC ) 通常定义为统计范围内植被(包括叶茎)垂直投影面积所占的百分比,它是描述地表植被分布的重要参数,在评价区域生态环境、揭示地表植被变化、监测植被长势等方面具有重要意义。植被覆盖度获取方法主要有目估法、人工采样法和光学仪器测量法,前两种方法受人为因素干扰较大,其结果不确定性大,利用光学仪器测量主要是光度量计和数字相片,需要人工地面采集,耗损大量的人力、物力、财力。在新时代发展背景下,无人机因其机动、灵活的特性,在低成本的基础上实现了空间和时间的辩证统一,缓解了高空间分辨率和时间分辨率的矛盾,而被应用于各个领域。因此作为一种新兴手段,可以考虑将其应用于植被覆盖度的提取,进而为矿山生态环境修复评价提供一种快速、有效的技术手段。文献[5]针对煤炭资源开发过程中形成的采煤沉陷、露天采场、固体废弃物堆积等损毁对象,以及由此产生的耕地损失、环境恶化、空气污染、矿-地冲突等矿区生态环境与社会问题,改变原有的“末端治理”理念,提出了煤矿生态环境“边开采边修复”理念以及实现路径;文献[6]以单一污染指数、内梅罗多因素指数和潜在生态风险指数为基础,评估了我国华南某锰矿周围5个矿区营养状况及污染水平;文献[7]通过对6种典型地物在无人机影像可见光波段的光谱特性分析,提出了超绿红蓝差分指数(excess green-red-blue difference index,EGRBDI),其研究结果表明该指数提取精度受地物类型差异影响的波动性较小,能较好地削弱影像中阴影等因素的影响;文献[8]利用逻辑回归算法,对具有复杂背景棉田冠层图像进行自适应阈值分割,其结果表明逻辑回归算法可为棉田自然复杂环境下机器视觉技术监测棉花覆盖度提供一种有效途径;文献[9]利用阈值分割算法提取出具有阴影图像的油菜籽植株,用定量评价标准对普通RGB植被指数进行了客观的分割,其研究结果表明COM指数效果最优;文献[10]利用可见光植被指数对喀斯特高原峡谷火龙果植株进行识别,将OTSU算法与直方图峰谷法对比,其研究结果表明VDVI是火龙果识别的最佳分割算法。
目前众多专家学者致力于无人机影像植被指数构建、图像阈值分割算法研究及分割算法改进等方面,鲜有人考虑将已有植被指数与多种阈值分割算法结合应用于矿区生态修复效果评价方面,此外前人所开展的矿区研究大多集中于采后生态环境变化监测,而对于具有人为扰动条件下的复垦区生态恢复评价方面的监测研究尚少。综上,本文选取四川古蔺某硫磺矿为研究区,综合利用植被指数阈值分割算法中基本全局阈值法与直方图峰谷法的优势,分析4种可见光植被指数在人为扰动土壤下和自然土壤下的植被生长状况,探究适宜用作复垦区植被覆盖度提取的分类方法,所得成果以期为矿区生态修复评价和方案决策提供理论基础和方法支持。
1 材料与方法
1.1 研究区概况
研究区位于四川省古蔺县某硫磺矿复垦区,介于27°41′00″~28°20′00″N,105°34′00″~106°20′00″E,属于亚热带季风性湿润气候,区内平均气温在12.4~18.6℃,全县年平均无霜期为260d。复垦区土地利用类型以耕地为主,林地集中分布于东南角,另有三处煤矸石填充地分别位于研究区北部、西部、及西南部地区。复垦区主要有两种不同区域,人为扰动区内地物类型规整,各地物界限分明,耕地呈梯状分布,且相对集中,如图1(a)所示;自然生长区内地物类型交错重叠、耕地斑块不规则,耕地边界与灌木杂草叠掩,如图1(b)所示。
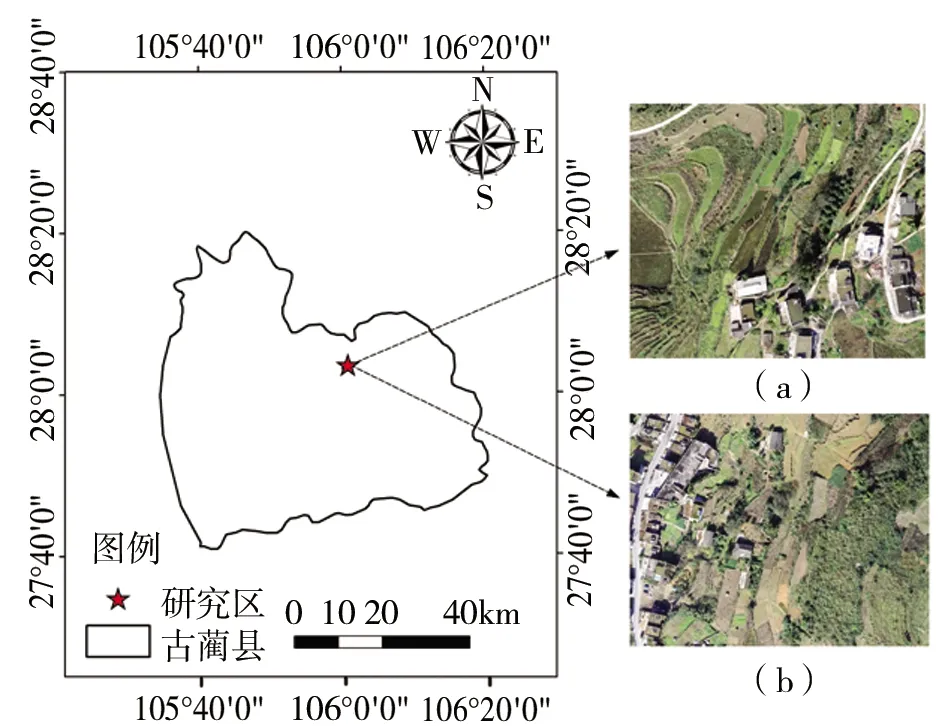
图1 研究区概况图
1.2 数据获取
本次实验数据获取采用中测新图公司自主研发的ZC-6监测型无人机遥感系统,遥感设备选用SonyA7R型微单数码相机,传感器尺寸为36mm× 24mm,分辨率为3 600万像素。依据《低空数字航空摄影规范》( CH /Z 3005—2010) 及研究区地形特征,航向重叠设计为75%,旁向重叠设计为45%,无人机采集图像时的飞行分辨率为5cm,相对航高为178.29m,飞行监测范围为11.44km,最终获取影像数目为72 992张。利用Pix4DMapper软件拼接所得图像,获取复垦区正射影像图。
1.3 研究方法
1)植被指数选取 植被指数是对地表植被状况简单、有效的度量。遍览文献[11-13]众多学者成果,对于植被覆盖度较低、地物交错,且由人为干预土壤下生长的植被,并未明确指出使用何种植被指数提取的效果较好,因此本文选择应用较为广泛、效果较佳的4种植被指数作为分类器的依据,其分别为归一化红绿差异指数(normalized green-red difference index, NGRDI)、归一化绿蓝差异指数(normalized green-blue difference index, NGBDI)、过绿指数(excess green, EXG)和可见光波段差异植被指数(visible-band difference vegetation index, VDVI),具体指数计算公式如下
(1)
(2)
EXG=2G-R-B
(3)
(4)
式中: R、 G、 B分别代表红、 绿、 蓝三个波段的像元值或反射率,r
、g
、b
分别表示归一化后的红、绿、蓝波段像素值,r
=R/(R+GB),g
=G/(R+GB),b
=B/(R+GB),NGRDI、NGBDI、VDVI值的范围均在[-1,1]间,EXG的值区域范围比较大,理论上为[-255,255],为了使得各分类器具有对比性,将EXG指数值除以255,使其归一化为[-1,1]。2)阈值法确定 图像分割算法种类众多,其中阈值分割算法由于其运算速率快、提取效果佳而被众多学者应用于农作物种植面积提取。为得到分类速度快、提取精度高的复垦区植被覆盖度提取算法,以上述4种植被指数所得灰度图为基础,选取直方图峰谷法与基本全局阈值法提取研究区植被。直方图峰谷法(Histogram peak-valley method,HPVM)认为图像由前景和背景组成,其灰度直方图有两个波峰,分别对应于图像的背景和前景,其最佳阈值在波谷处取得。基本全局阈值法(Basic Global Thresholding,BGT)以迭代法为基本思想,预先设定迭代结束条件及初始阈值,通过多次迭代计算,求得最佳分割值,其具体步骤如下。
①计算出图像区域的最大灰度值Z
和最小灰度值Z
,将初始阈值T
={T
|k
=0}定义为
(5)
②根据阈值T
将图像分割成目标和背景两部分,计算出两部分的平均灰度值Z
和Z
(6)
(7)
式中:Z
(i
,j
)为图像中(i
,j
)处的灰度值,N
(i
,j
)为(i
,j
)点的权重系数,一般取N
(i
,j
)=1。③计算出新的阈值T
+1
(8)
④重复步骤②和③,直到T
与T
+1之差小于事先定义的参数量或为0时跳出循环,从而得到最佳分割阈值T
+1。3)FVC提取与精度评价
①FVC提取 植被覆盖度在影像中表现为植被像元数占整个研究区域像元数的百分比,可依据此原理构建如下植被覆盖度计算公式
(9)
②精度评价 传统FVC精度评价方法主要通过实地调查验证,精度虽高但工作量大,耗费大量人力、财力。随着无人机遥感技术和分类算法的发展,文献[17-18]学者以监督分类结果作为植被覆盖度真实值,在FVC提取精度评价方面取得良好效果。将无人机获取的复垦区影像的监督分类结果作为地面植被覆盖度真实值,对植被指数阈值法获得的结果进行精度评价。选用FVC绝对误差(E
)和FVC提取误差(E
)构造如下评价公式E
=|F
-F
|(10)
(11)
式中:F
为监督分类获取的植被覆盖度,F
为植被指数阈值法获取的植被覆盖度。2 结果与分析
2.1 复垦区不同条件下植被指数计算
为研究植被指数算法在自然条件下的植被提取与人为扰动下条件下植被提取规律,就复垦区内选取地物类型相近的两处区域(见图1),分别进行如下实验。
1)人为扰动条件下植被指数结果 对复垦区人为扰动条件下的区域计算EXG、VDVI、NGBDI及NGRDI这4种植被指数,复垦区植被指数计算结果如图3所示。由植被指数分类结果可知,EXG、VDVI及NGBDI植被指数对不同地物边缘分割较为清晰,而NGRDI指数对于植被覆盖度低的区域识别不明显;NGBDI指数相较于前两种其细节信息模糊,对于道路、房屋与植被交错的区域识别度不高。
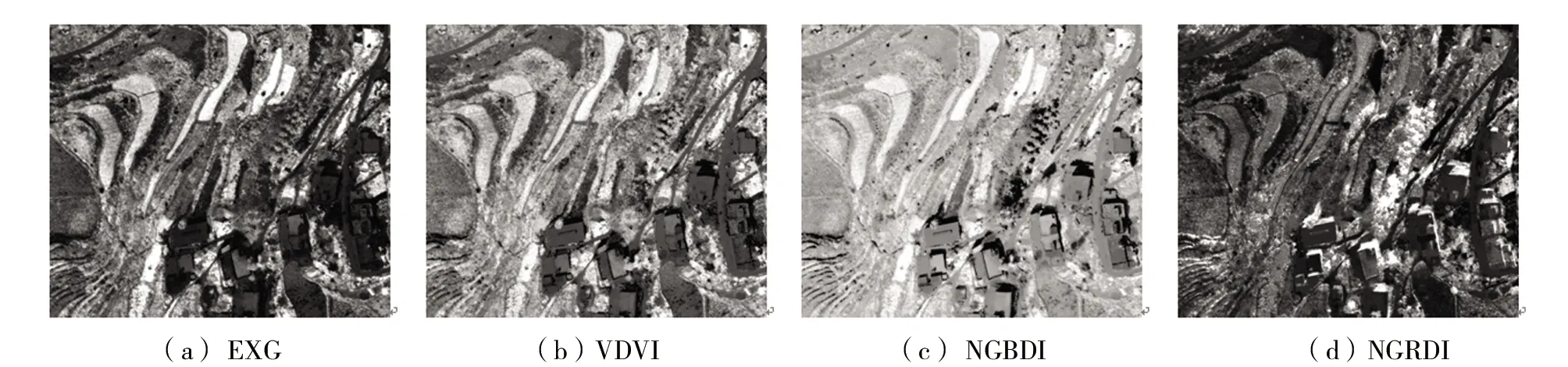
图2 人为扰动区植被指数分类结果图
2)自然生长条件下植被指数结果 为对比复垦区不同条件下植被恢复情况,对研究区自然生长条件下的无人机遥感影像计算EXG、VDVI、NGBDI及NGRDI4种可见光波段植被指数,计算结果如图3所示。从图3可以看出,EXG和VDVI两种植被指数结果相对较好,对不同地物表现清晰、准确;而NGBDI及NGRDI这两种植被指数对不同地物灰度划分不明显,地物边缘不明确。
2.2 基于不同阈值法图像分割
1)植被指数直方图峰谷法阈值分割 为寻找复垦区无人机遥感影像分割的最佳阈值,使得植被与非植被分类结果更加精确。本文选用了直方图峰谷法和基本全局阈值法对研究区不同植被指数求取最佳阈值,以达到分离植被的目的。由图2、图3所得植被指数通过统计不同植被指数值出现频率,可以得到其灰度直方图结果(见图4)。由图4可知EXG算法所得植被指数直方图呈明显的多峰现象;而其余3种算法所得植被指数呈双峰时不明显、呈多峰现象时表现为锯齿状,因此无法依据直方图峰谷法基本原理求得最佳分割阈值。
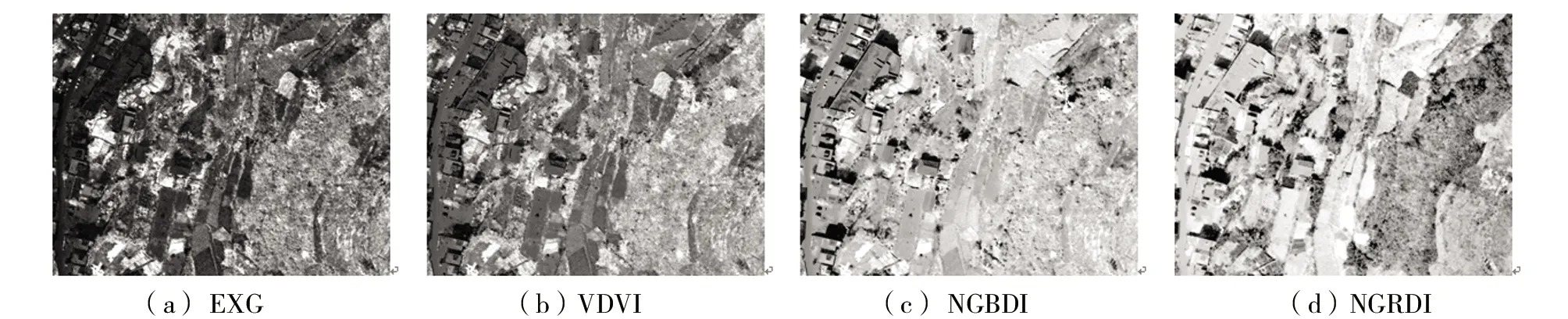
图3 自然生长区植被指数分类结果图
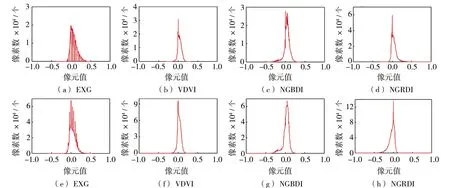
注:(a)~(d)代表人为扰动条件下植被指数灰度直方图;(e)~(h)代表自然条件下植被指数灰度直方图图4 复垦区植被指数直方图
2)基本全局阈值法阈值分割 针对植被指数直方图峰谷法无法确定图像的最佳分割阈值的情况,采用基本全局阈值法进一步探究植被指数阈值法提取矿区植被覆盖度的可行性。将基本全局阈值法思想利用MATLAB软件实现,以上述所选4种植被指数为灰度图,求得不同植被指数的最佳分割阈值(见表1)及复垦区植被与非植被分离结果(见图5)。
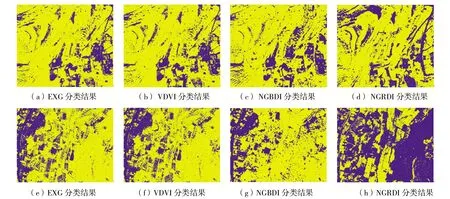
注:(a)~(d)代表人为扰动条件下求得的阈值;(e)~(h)代表自然生长条件下求得的阈值图5 基本全局阈值法分割结果
由基本全局阈值法所得分割结果可知,将BGT算法应用于复垦区植被覆盖度提取时出现低估现象,在人为扰动条件下,EXG、VDVI、NGBDI及NGRDI覆盖度依次为34.59%、43.83%、15.10%及27.63,而人为扰动条件下FVC真值为58.00%;在自然生长区EXG、VDVI、NGBDI及NGRDI覆盖度依次为39.19%、44.53%、15.10%和27.63%,而自然生长条件下FVC真值为52.70%。利用BGT算法所得结果与真值相差较大,基于单一全局阈值法无法实现复垦区植被覆盖度的准确提取,其具体精度评价结果如表2所示。

表1 研究区各植被指数阈值统计表
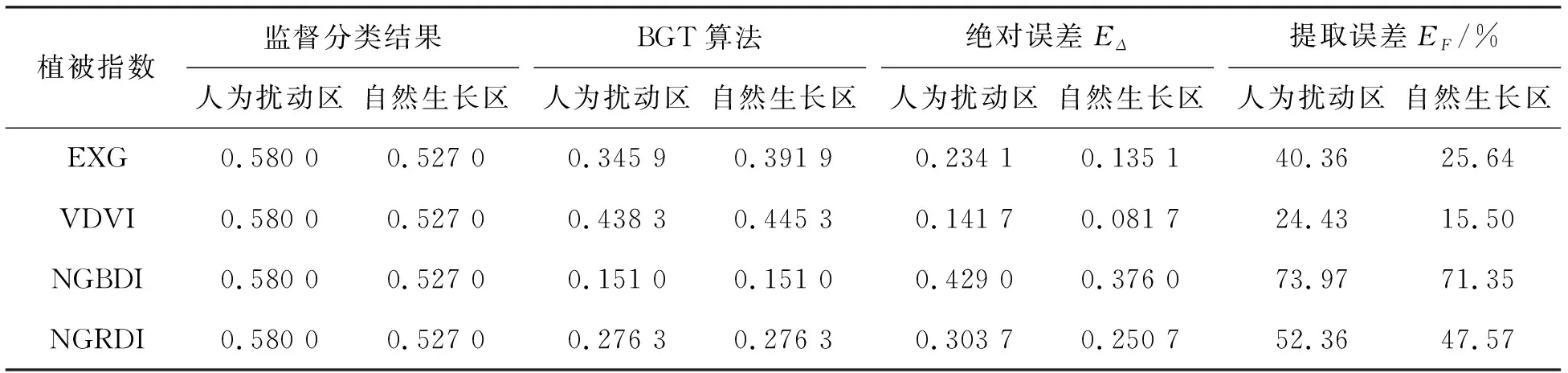
表2 植被覆盖度提取精度
3)基本全局阈值法与直方图峰谷法融合算法 由于直方图峰谷法在本研究中无法确定最佳分割阈值,而利用基本全局阈值法图像分割效果不理想,综上考虑将两种方法融合,最终得到如下分割结果(见图6~7)。为进一步验证本文方法的精度,将研究区RGB影像利用MATLAB直接转化为灰度图,利用融合算法进行图像分割,其结果见图6(b)、图7(b)。由图6可知,EXG和VDVI这两种植被指数运用B-H分割算法所得效果最好,典型地物区分度高、边界明显;而植被指数NGBDI对于房屋识别度高、轮廓明显,对于其余地物特别是中部耕地所得效果不理想;直接灰度法与NGRDI方法相较于NGBDI方法效果略好,对于植被覆盖度低的部分错分现象严重。
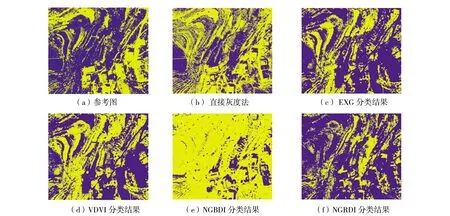
图6 人为扰动区植被分离图
同理将B-H融合算法应用于自然生长区,其结果如图7所示。EXG和VDVI植被指数分类结果较为理想,对于植被覆盖度低的区域提取效果理想、耕地边缘表示明显,而对于灌木杂草混杂生长的区域识别度差、部分灰绿色植被错分为裸地;直接灰度法、NGRDI及NGBDI这三种分割算法对于房屋阴影敏感,且NGRDI及NGBDI对道路、房屋这类规整地物其轮廓清晰,而直接灰度法所得结果略优于NGBDI及NGRDI两种方法。
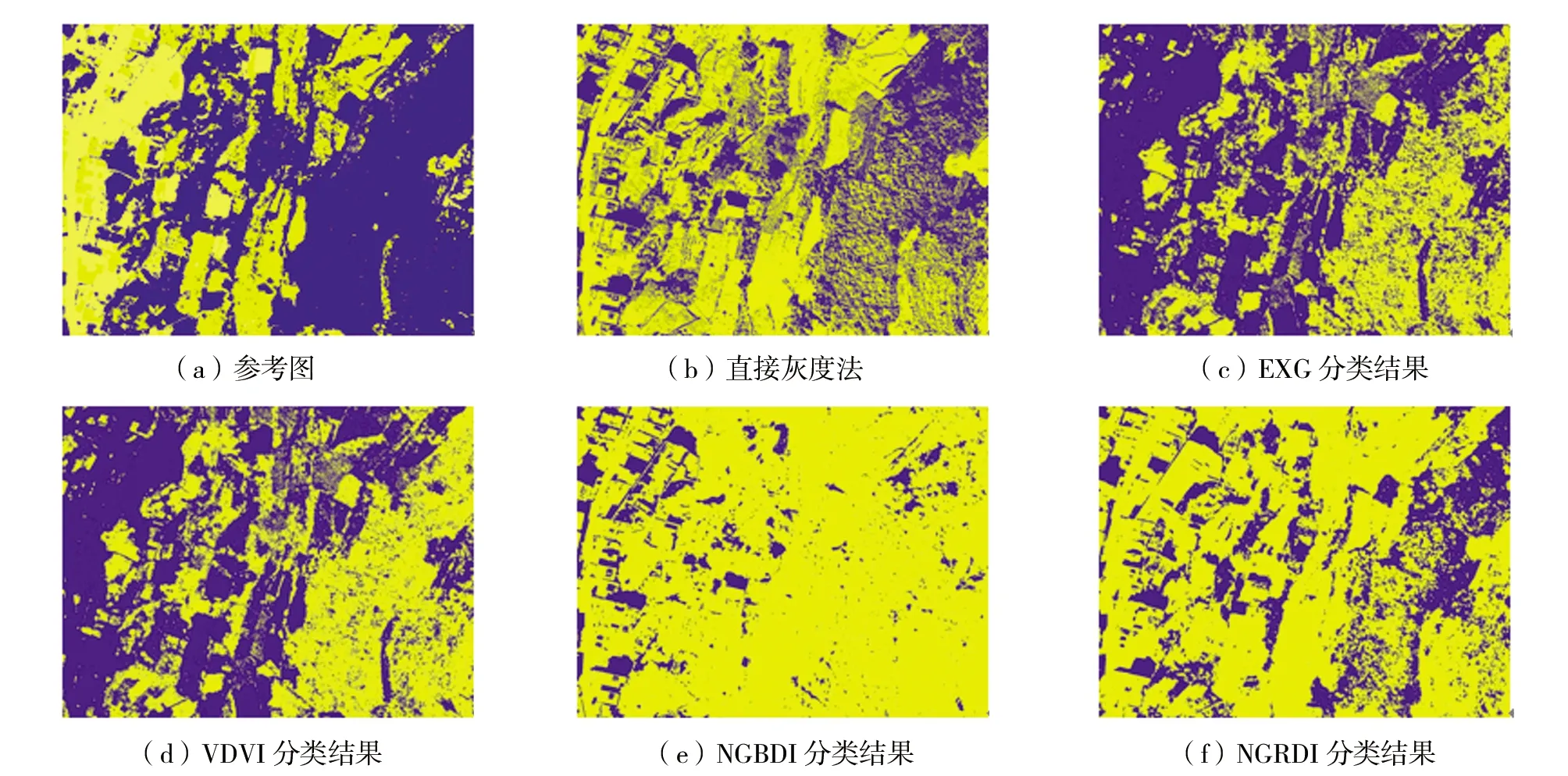
图7 自然生长区植被分离图
2.3 复垦区植被覆盖度提取结果与分析
为分析B-H算法的提取精度,按式(9)统计植被覆盖度结果,利用式(10)~(11)精度分析方法,以监督分类结果为实测值,对基于的无人机遥感可见光波段影像与植被阈值法的矿区植被覆盖度进行精度计算(见表3)。由表3可知,EXG分类阈值结果在人为扰动区与自然生长区绝对误差分别为0.053 3和0.036 6,VDVI分类阈值结果在人为扰动区与自然生长区绝对误差分别为0.040 9和0.026 0,这两种方法提取精度最高;而NGBDI及NGRDI运用融合算法后,其覆盖度提取精度较单一基本全局阈值法提高了7%~10%;而运用直接灰度法提取植被覆盖度时其绝对误差相对较大,说明基于植被指数的阈值提取算法可以提高矿区植被覆盖度提取精度。
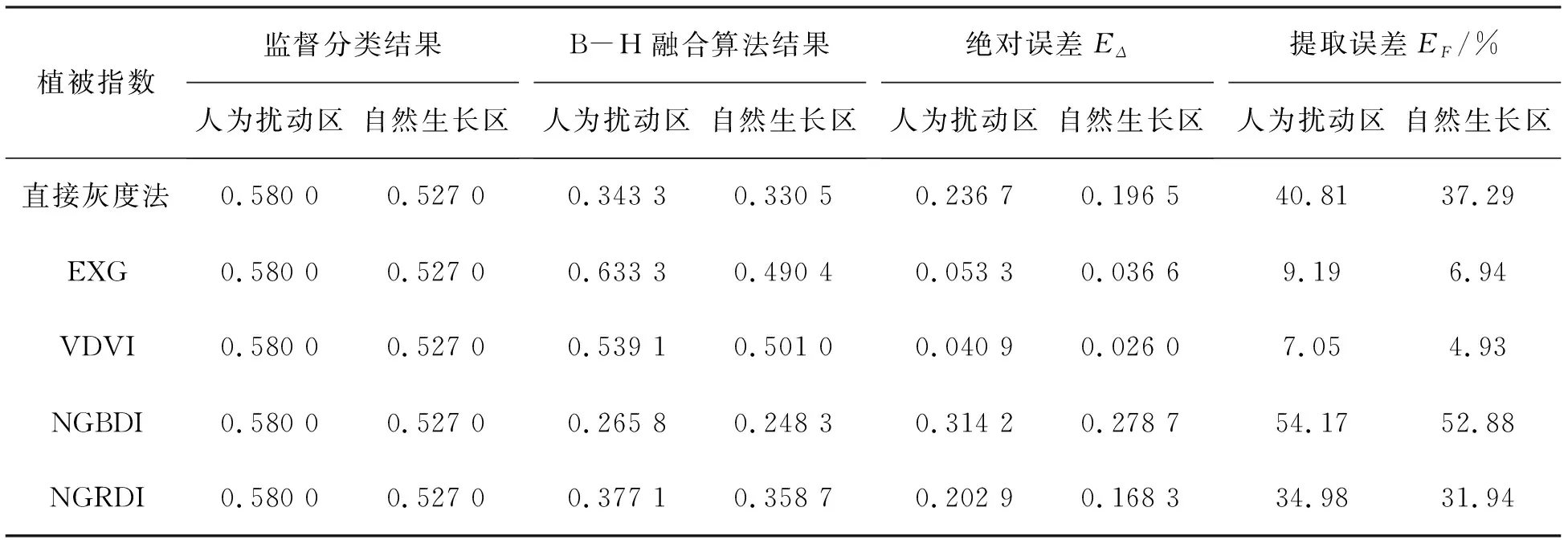
表3 植被覆盖度提取精度
3 讨论
矿区生态修复对于缓解人地矛盾、改善矿区生态环境具有重要意义,传统矿区生态恢复评价手段以人工实地调查为主,耗费较多人力、物力、财力,而无人机以其获取影像快速、成本低廉、精度相对较高而受到众多专家学者青睐。无人机可见光波段不仅处理简单,而且辅以指数计算、纹理分析等手段可实现植被覆盖度提取、农作物面积估算及农作物分类等信息的获取,在推广应用上具有获取数据简单、影像处理方便等特点,文献[19]等诸多学者将可见光波段应用于作物覆盖度提取时获得较高精度,而可见光波段在矿区复垦效果评价方面的应用有待于深入挖掘。
传统研究方法将单一阈值分割算法与植被指数相结合提取农作物覆盖面积时取得良好结果,本研究以无人机获取的大范围、高分辨率研究区影像为数据源,将4种植被指数作为分类器,应用于矿区生态修复评价时发现,单一阈值算法应用于复垦区植被覆盖度提取时效果不太理想,可能是由于复垦区植被生长复杂、人为扰动大,使得运用单一阈值分割算法精度有所降低,鉴于此,考虑将前人所用算法融合,再对研究区植被覆盖度提取,经研究表明EXG、VDVI是较为稳定的分类器,其分类结果较为准确,对于地物细节信息描述详细,这与其他学者的研究结果一致,基于植被指数阈值法所得植被覆盖度结果较为理想,表明B-H融合算法可作为一种复垦区生态恢复效果评价手段。
矿区生态修复方法众多,不同复垦方式对于植被的长势影响不尽相同,本文以四川古蔺的煤矸石填充矿区为研究区域,提出利用直方图峰谷法与基本全局阈值法融合提取植被覆盖度进而评价复垦效果,而由于矿区复垦方式的复杂性及土体结构的改变等原因,使用植被覆盖度对复杂复垦方式下的复垦效果评价有待于进一步验证。因此如何将阈值分割算法与植被覆盖度提取结合应用于复杂复垦区复垦效果评价是下一步研究工作的重点。
4 结论
本文为探究无人机遥感植被指数阈值法在复垦区生态修复评价中的可行性,通过对矿区人为扰动条件和自然生长条件下的植被覆盖估算,评估了四川古蔺某硫磺矿复垦情况,得出如下主要结论:
(1)根据监督分类结果与植被指数阈值法结果比较,发现植被指数EXG和VDVI在矿区植被覆盖度提取精度较高,可以有效解决人为扰动条件下植被覆盖度低时,提取植被覆盖度效果不理想的问题,能够满足矿区生态修复效果评价的要求;
(2)图像分割阈值划定对FVC的准确提取起到至关重要的作用,利用直方图峰谷法确定最佳阈值时直方图出现了双峰不明显或多峰现象,这给阈值的确定带来了影响;而利用基本全局阈值法确定阈值分割后的图像与原始参考图产生了较大的出入,精度较低;使用B-H融合算法分割后的结果较为准确,此也表明将两种方法融合能弥补单一方法存在的局限性;
(3)与直接灰度转换法相比较,可见光植被指数与B-H融合阈值分割算法相结合确定的阈值结果较为理想,EXG在复垦区自然条件下植被绝对误差和提取误差分别达到0.036 6和6.94%;而对于复垦区人为干扰条件下VDVI对FVC的提取精度最高,绝对误差和提取误差分别达到0.040 9和7.05%。