
基于姿态库的危险品检测机械臂远程控制
2021-10-26 05:54郑育祥董二宝李阳鸿
机械与电子 2021年10期
郑育祥,许 旻,董二宝,李阳鸿
(中国科学技术大学工程科学学院精密机械与精密仪器系,安徽 合肥 230027)
0 引言
随着近现代工业技术的高速发展,很多探索工作和高危作业环境,人力往往无法直接到达,需要机器人代替人力进行远程作业。几十年来,国内外学者针对机器人的远程控制进行了广泛研究。
目前,主流的远程控制技术分为3类:主从式遥操作机器人方案,操作者通过操作主端机器人来控制从端机器人进行探索和作业任务[1-3];人机遥操作方案,通过环境感知设备感知人体姿态变化来控制机器人[4];远程上位机方案,上位机(遥控箱、遥控手柄、手机和平板等)在无线网络下与机器人实时通信控制[5-6]。
然而针对恐怖事件现场的危险品检测作业时,存在野外环境干扰以及远程操作的便携性,主从式遥操作和人机遥操作方案显然不适用于该场景;而远程上位机方案相比其他2种方案来说,其对于控制多自由度机械臂灵活性不高。而且在危险品检测作业中,往往需要针对危险品的特殊性,采用专门的姿态去采样,所以提出了一种基于姿态库的远程控制方法,压缩了操作时间,能更高效地完成检测作业。
1 机械臂远程控制系统构成
危险品检测机器人机械臂远程控制系统由六轮移动平台、机械臂、控制系统和末端检测装置等组成,如图1所示。

图1 面向警用无人平台的机械臂远程控制系统
六轮移动平台通过采用空心杯跨步驱动电机,集成扭杆悬架实现驱动悬架一体化,采用轮毂电机集成转向电机和盘式制动器实现轮边驱动、转向与制动一体化,联合轮步结合多自由度协调驱动控制方法,实现六轮驱动、全轮转向和轮步行走等功能。
机械臂安装在六轮移动平台顶面。通过MATLAB仿真优化设计连杆尺寸,采用机电一体化旋转关节模组设计协作型机械臂,能满足1.3 m的特殊作业工作空间需求及10 kg的负载需求。
如图2所示,整个控制系统采用上位机和下位机实时监控,上位机端采用的是PS2遥控手柄,应用2.4 GHz无线技术与下位机实时通信。下位机安装在六轮移动平台内部,主要由STM32核心板、EtherCAT通信模块、无线通信模块和电源稳压模块组成。其主要功能是解析上位机发送指令、机械臂正逆解运算、EtherCAT总线信息交互、姿态库控制、控制末端检测装置的固体和液体采集以及相关功能指令。
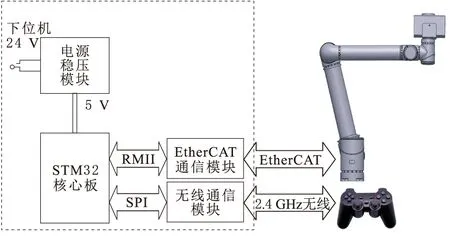
图2 下位机控制器模块连接关系
末端检测装置采用的是安徽芯核防务公司的模块化危险品检测设备,能实现固体和液体采集功能,安装于机械臂的末端工具法兰上。
2 机械臂运动学建模
考虑到姿态库控制中针对不同作业场景下的不同姿态,需要对其机械臂做正解和逆解控制。
首先,采用改进后D-H法建立机械臂模型,D-H参数如表1所示。
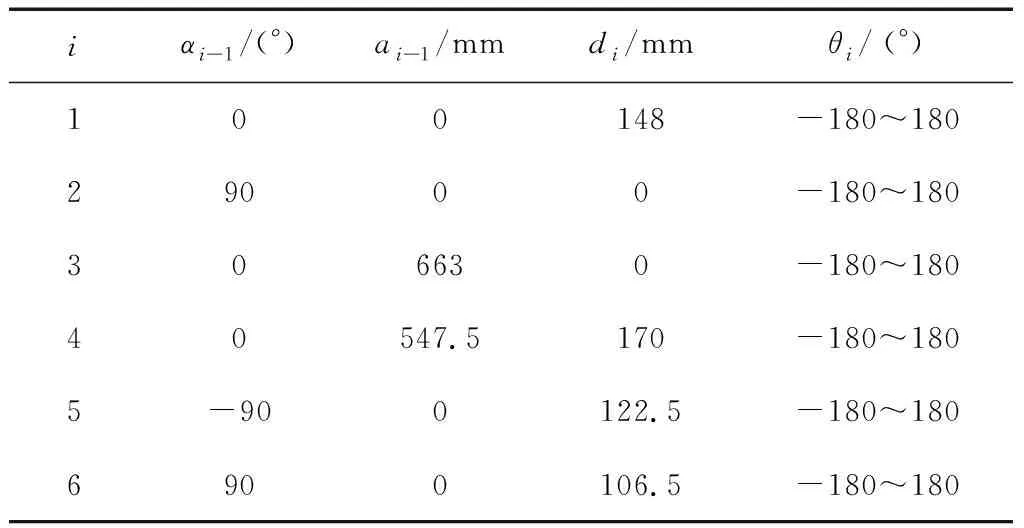
表1 机械臂D-H参数
2.1 运动学正解
应用改进的D-H模型可以得到机械臂连杆变换公式为
(1)
此模块实现教师信息的管理功能,此模块包括查询、新增、更新教师信息等功能操作。教师信息包含教师编号、教师姓名、学历、参加工作时间、职称、职务、资格证书、所属系部、专业领域、科研情况等相关信息。
(2)

2.2 运动学逆解
根据式(1)和式(2),限定条件为机械臂各个关节的运动范围为[-π,π],通过解析法,可以依次推导出各个关节角度的解[7]:
θ1=arctan(0P5y,0P5x)±
(3)
(4)
(5)

(6)
(7)
(8)

由此可以发现,对于机械臂工作空间中某一位姿,可能存在的逆解个数为
2θ1×2θ5×1θ6×2θ3×1θ2×1θ4=8
(9)
考虑机械臂碰撞和角度限制问题,通常选取基关节[θ1θ2θ3]角度空间最近点作为最优解,所以需要对求得的8组解比较角度空间距离,即
di=‖Φi-Φ0‖
(10)
Φ0=[θ10θ20θ30]为当前机械臂基关节角度向量;Φi=[θ1iθ2iθ3i]为第i组解基关节角度向量;di为第i组解的角度空间距离。
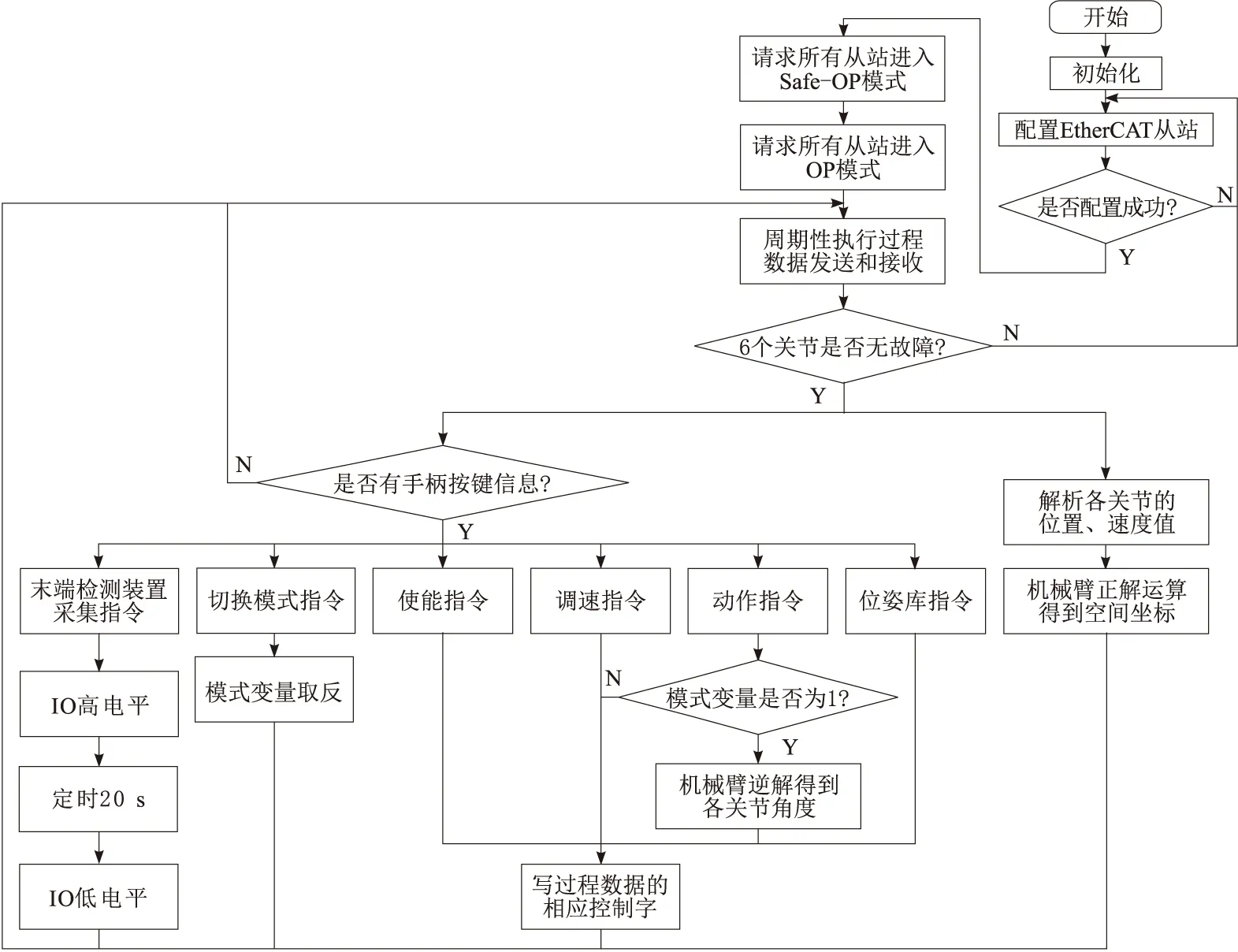
图3 下位机控制器程序流程
3 姿态库控制
针对危险品的特殊性,需要采用专门的姿态去采样,依据机械臂在移动平台的安装位置选取了几个常用的采样姿态,组成姿态库,如图4所示。

图4 姿态库
图4a为原点姿态:机械臂不工作时的姿态。保证其整体是收拢的,避免在移动平台行走时与其他物体碰撞。在每次完成作业时,需要机械臂回到原点姿态,即复位动作。
图4b为初始姿态:原点姿态与其他几个常用姿态的中间过渡姿态。保证其各姿态切换时的轨迹的安全性。
图4c ~图4g为方位姿态(左侧方、右侧方、正前方、上前方和下前方姿态):针对采样目标在移动平台相应方位时设置的姿态。
预先示教好上述的各姿态,将多组姿态数据组成姿态库存储在下位机控制器里。在远程上位机只需要相应按键即可调用姿态库中相应姿态动作,当机械臂到达期望的方位姿态后,如果末端检测装置距离检测目标还存在着一段距离,可以通过上位机操作基坐标方向微动动作指令,到达期望的目标位置。具体操作流程如图5所示。
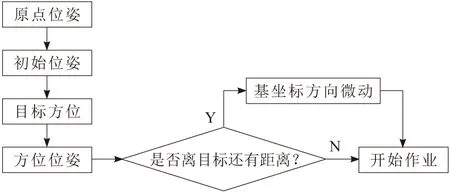
图5 检测操作流程
4 实验
实验分为无线通信实验和有无姿态库对比实验。
4.1 无线通信实验
在无线通信实验中,无线通信的有效距离定义为:从六轮移动平台的前端前进,当无线手柄和接收器的连接灯开始闪烁时,即表示通信断开,记录当前位置与下位机控制器之间的距离。
经过多次测试发现,在室内环境下当离下位机控制器10 m范围内,信号较强,通信实时性较高;而在室外环境下受干扰较多,在距离8 m范围内,能保持正常通信。无线遥控的距离取决于无线信号的覆盖范围,在实际应用中可采用远距离无线网桥的方案增加遥控距离。
4.2 有无姿态库对比实验
随机给定一个机械臂工作空间内的指定目标,用常规关节控制和姿态库控制2种方式控制机械臂到达指定目标位置,用电子秒表记录每次从原点位置到检测目标位置所用的时间。每组多次记录,取平均值。
本实验在空间中随机选取了10个点进行对比实验。实验控制过程如图6所示,在一块固定板上贴合了一个圆柱状红色标记物,作为目标点,可通过移动固定板和调整其高度,重新选取目标点。其中,箭头指向为指定目标点,每张图右下角为开始记录到当前的时间点。
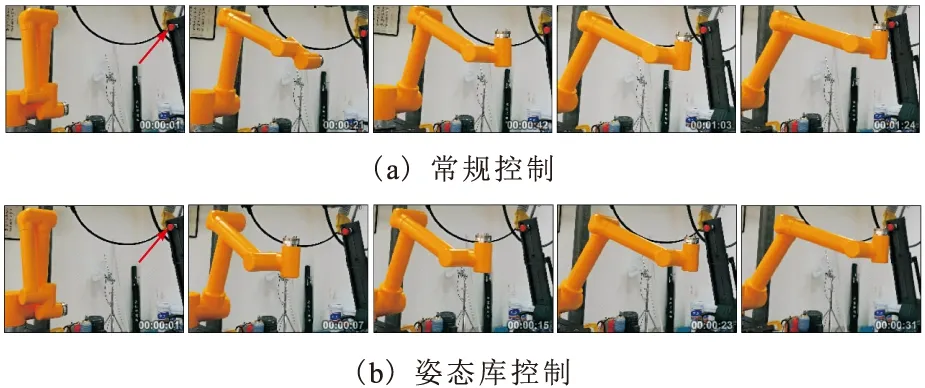
图6 第1组连续抓拍
本实验的10组数据对比结果如图7所示。根据10组记录的时间结果对比发现,采用姿态库控制所用时间远小于常规关节控制所用的时间,可以验证基于姿态库的优异性,能减少远程控制机械臂到达目标的时间,提高效率。
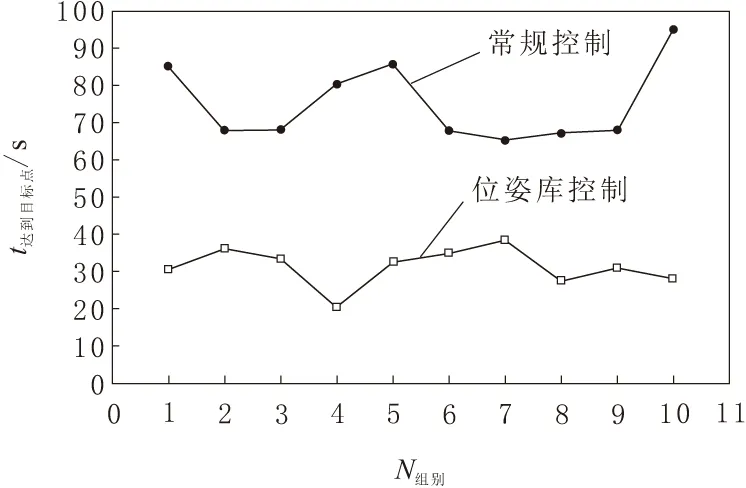
图7 10组随机点2种控制所用时间对比
5 结束语
提出了一种基于姿态库的危险品检测机器人机械臂远程控制方法,设计了机械臂远程控制系统的整体架构方案,通过分析机械臂运动学,在下位机控制器建立机械臂正逆解模型;分析采样作业的几种常用姿态,建立了姿态库,实现了远程一键调用。通过实验发现,无线通信距离基本满足作业要求,但受室外干扰,通信距离影响较大。增加姿态库控制,可适用于危险品检测作业场景,可以降低无线通信被干扰的影响,有效地减少作业时间,验证本文方法的有效性。
猜你喜欢
科技与创新(2018年1期)2018-12-23
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
IT时代周刊(2015年9期)2015-11-11
学习月刊(2015年3期)2015-07-09
空间控制技术与应用(2015年2期)2015-06-05
专用汽车(2015年4期)2015-03-01
