
多旋翼无人机动力系统性能测试实验设计与分析
2021-10-25 02:28:32吴金宇杨蕊姣
电子测试 2021年19期
吴金宇,杨蕊姣
(中电科芜湖通用航空产业技术研究院限公司,安徽芜湖,241000)
0 引言
螺旋桨、电机、电调和锂电池构成了电动多旋翼无人机的动力系统,通过控制电机转速来实现无人机的六种飞行状态变化[1]。今年来发生无人机坠毁事件频繁发生,主要是由于对无人机的飞行性能不够了解,在使用时超出飞行时各项安全性能指标。故为了确定多旋翼无人机的安全飞行使用范围,需要在安装试飞前对进行特性测试与计算,以便使无人机能够进行安全高效率的飞行。目前,针对多旋翼无人机动力系统的研究内容较少,且测试方法简便,文献[2-4]中均通过电子秤或专用的显示仪器分别来测量无人机螺旋桨的转速、拉力和扭矩值,所测量数据需要手动记录,操作起来比较繁琐且效率过低。因此,设计开发完整的无人机动力系统特性测试实验系统具有一定的应用价值。本文所设计的实验系统可对螺旋桨的转速、拉力、扭矩、温度、电压、电流和PWM 等值进行同时测量,实现数据采集和保存,并根据测试数据计算出无人机的飞行性能。
1 多旋翼动力学模型
本文以四旋翼无人机为例建立其动力学模型,其结构模型如图1 所示,当无人机电机转速发生改变时螺旋桨升力和扭矩也随之发生改变。
对于X型无人机四个旋翼产生的拉力与无人机动力关系模型如下:
Ti为第i 个旋翼所产生的拉力(i=1、2、3、4)(N),FT为四个旋翼产生的拉力总和,Mφ、Mθ、Mψ分别代表无人机的滚转力矩、俯仰力矩和偏航力矩(N·m);l 为旋翼到无人机重心的水平距离即臂长(m)。根据叶素理论可得出螺旋桨拉力、扭矩与转速之间的关系式[5]:

其中ρ 为空气密度(Kg/m3),r 为螺旋桨的直径(m),CT和CM分别为螺旋桨拉力系数和扭矩系数,由于以上参数均为定值,故对两式进行简化得:
KT和KM分别代表螺旋桨拉力总系数和扭矩总系数,故将式(1)表示为:
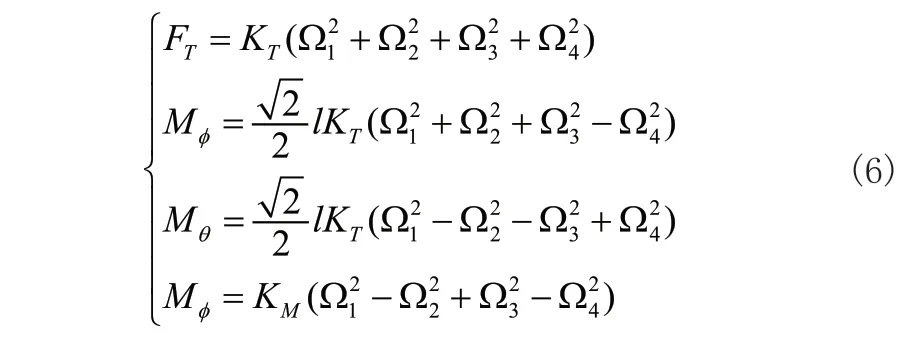
综上可知四旋翼动力学模型中的主要参数分别为总拉力系数KT(N.s2/rad2)和总扭矩系数KM(N.m.s2/rad2) 。
在控制无人机飞行前,需要对动力学模型中的参数进行测量。
(1)最大起飞重量与载重
无人机的最大起飞重量为四个旋翼产生最大拉力时,即PWM 信号给到最大时:
其中n 为旋翼数,Gfman 为无人机最大起飞重量(N),Tmax 为一个旋翼的最大拉力值(N)。以上为理论的计算值,而在实际的四旋翼飞行时,由于飞行中会遇到不确定的因素,例如风向的阻碍、拉力最大值的不一致等原因会对飞行造成一定的影响,故旋翼产生的总拉力应略大于重力,占空比一般取0.8~0.9 左右,从而给无人机控制的一定裕度,确保无人机可以进行稳定的安全飞行。四旋翼无人机在使用时通常要搭载机载设备,例如摄像头、农药箱的机载设备:
其中Gz为四旋翼无人机的总重量(N),Gmaxload 为无人机机载最大载重质量(N)。
(2)最大悬停时间
在四旋翼无人机进行空载悬停时,需要旋翼产生的总拉力与无人机所受到的总重力相等,则有:

无人机在悬停的状态下,输出的电流为固定值,故通过计算此时拉力所需要的电流Ih值大小(mA),而可以求出无人机的最长悬停时间thmax为:
(3)最大飞行速度与飞行距离
四旋翼无人机在进行平飞时,会发生姿态的改变,使旋翼产生沿水平方向的分力从而实现其无人机的平飞运动。旋翼旋转时所产生的拉力沿竖直方向的分力与重力相等,沿水平方向的力与空气阻力相等。当旋翼拉力达到最大时,机身的倾角也达到最大,此时平飞速度达到最快,如图2 所示。
最大俯仰角为:
无人机所受的阻力与飞行速度的关系为:
其中V 为无人机的平飞速度(m/s),CD为无人机在机身为θmax的角度下所受到的阻力系数(N·s2/m2),代入公式中可以求出对应的电池放电电流,通过计算出放电时间进而求出无人机的航程。

当θ=θmax时,Z(θmax)为最远飞行距离为(m);
2 实验系统设计方案
本实验系统基于STM32F407ZGT6 单片机对红外光电反射光耦计数传感器的数据进行实时采集计算转速并为电机提供PWM 信号值;通过8port RS485/422 采集设备对BSLS-2S型拉压力传感器、JNNT-2型双法兰静态扭矩传感器、电压电流传感器和CK-01A 红外温度传感器输出的数据进行采集;最后通过串口通信传输给PC 机中,采用LabVIEW 软件对采集的数据进行实时显示、绘制波形曲线并保存[6],系统结构框图如图3 所示。

图3 实验测量结构框图
将待测直流无刷电机和螺旋桨固定到测试平台的杠杆前端,电机左侧安装红外反射光耦计数传感器进行转速测量[7]。在电机下端与扭矩传感器进行连接,拉压力传感器的上端与杠杆的另一端相连。杠杆终端安装红外测温传感器。实验平台的设计图如图4 所示。
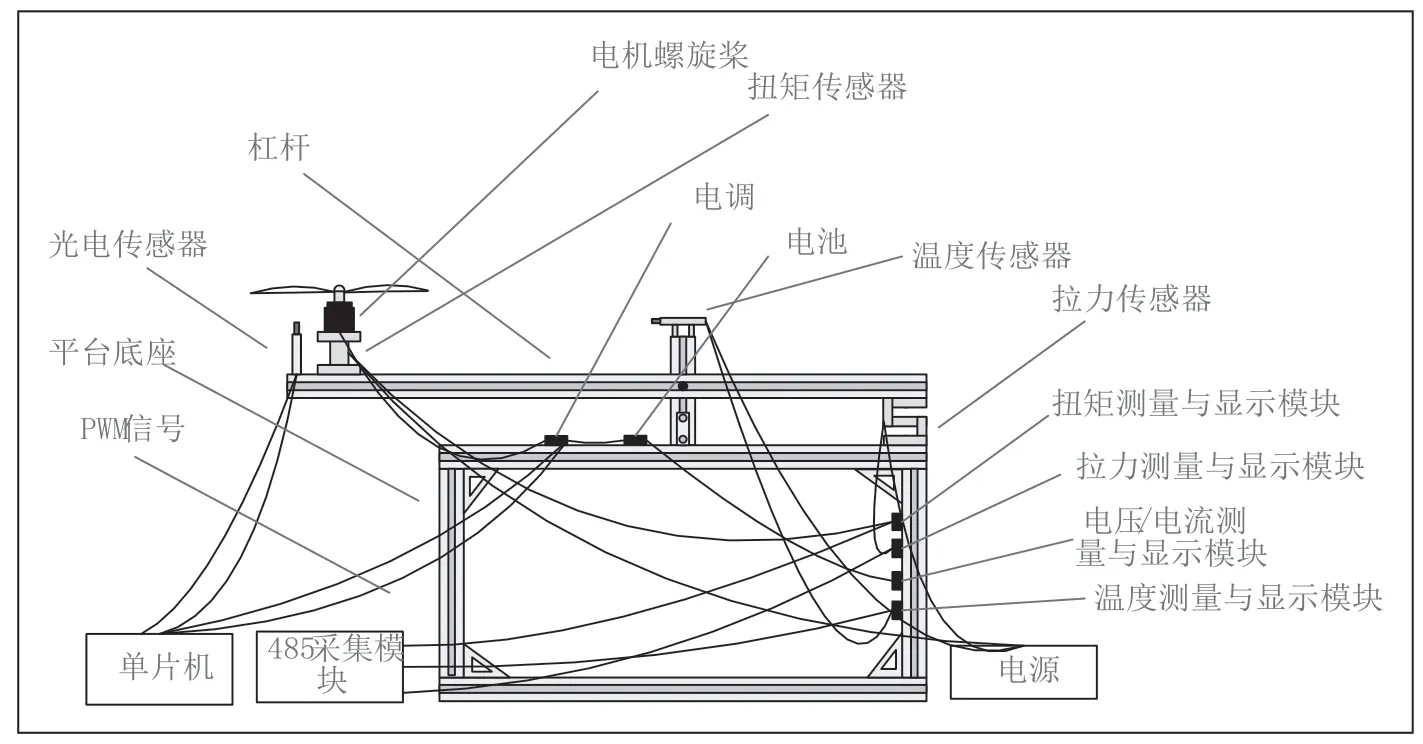
图4 实验测量平台组成
3 实验系统软硬件设计与实现
3.1 下位机系统设计
(1)拉力传感器
选用BSLS-2S型拉压力传感器(本文只用到拉力部分),工作量程为0~20(Kg),输出灵敏度为1~1.5(mv/v)。
(2)扭矩传感器
选用JNNT-2型双法兰静态扭矩传感器,双法兰便于安装且稳定,工作量程为0~5(N·m),输出灵敏度为2.0±0.1(mv/v)。
(3)电压电流传感器
选用双向正负测量电压电流检测485 模块,模块可实时输出当前测量信号的源码数据,通过上位机按照相关格式对采集设备采集到的信号数据进行解析。
(4)温度传感器
温度测量选用红外温度非接触式传感器测温探头,用于实时监测当前电机设备表面温度,工作量程为0~200(℃)。
(5)转速测量
选用漫反射光电开关AYJG-08NO M8 激光传感器红外感应器。具有信号干净、波形好、驱动能力强等特点。激光传感器红外感应器输出的红外信号在遇见遮挡时进行反射输出高电平,无遮挡输出低电平,故当电机旋转时,螺旋桨会对传感器进行遮挡,从而产生脉冲信号。本文中采用T 测速法[8],对电机的周期进行测量,其原理是根据测量两个脉冲之间的时间来计算旋翼的转速值,适用于低转速测量,计算公式如下:
式中Ω 为电机转速(rad/s-1),f 为计数器频率(Hz),p为螺旋桨桨叶数,m 为两个脉冲之间的计数值,当有脉冲扫过时打开计数器开始计数,在下一脉冲到来时关闭计数器根据公式(7)计算出当前的转速值,同时将计数器清零,以便下一脉冲到来时计数[9]。
(6)PWM 信号产生
由于遥控器输出的PWM 信号无法在上位机中显示,本实验通过单片机中的定时器代替无线遥控器输出PWM 信号。其工作原理如图5 所示,图中采用向上计数的方法,其中arr 为预装载值,可控制输出的频率;ccrx 为设定的比较值,可控制脉冲的宽度,当cnt的值大于ccrx时输出高电平,小于ccrx 时为低电平,有效电平可根据程序进行设置。而在一个周期内有效电平所占的时间与整个时间的比值称为占空比σ[10]。
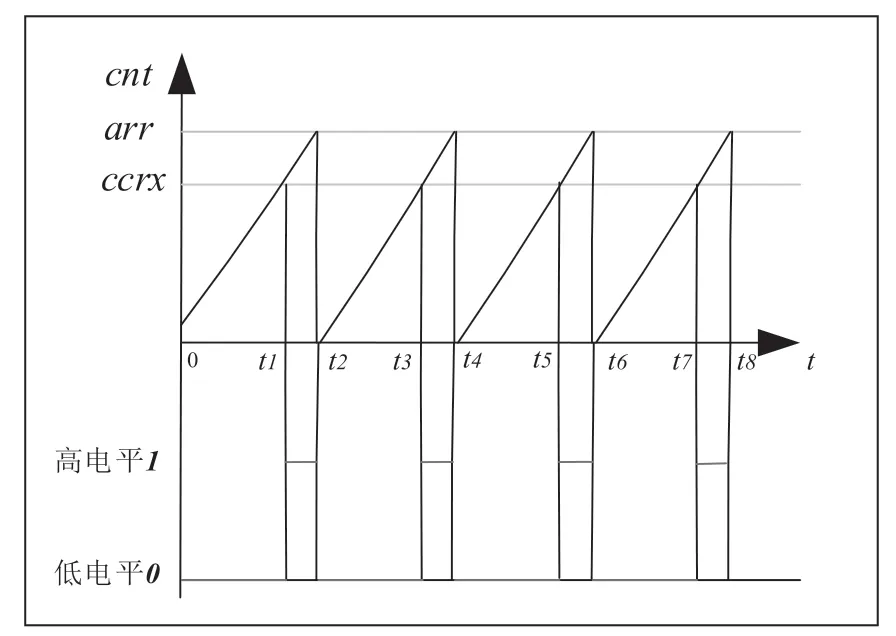
图5 PWM 工作原理图
本设计中使用STM32 中的定时器TIM14 来输出PWM 信号,首先对定时器的arr 与psc 值进行设定,公式如下:

psc 为时钟预分频系数,Tclk 为输入的时钟频率(MHz),Tout 为设定的溢出时间。实验将所要输出的PWM 信号频率设为400Hz,公式中Tclk 为84MHz,故将arr 值取2499,psc 取83,此时Tout 输出值为2.5ms,PWM 输入范围1000~2000。
3.2 上位机设计介绍
LabVIEW(Laboratory Virtual instrument Engineering Workbench)简称实验虚拟仪器集成环境,由于其编程方式是通过图标和连线构成的流程图[11],所以操作起来比较简单,从而大幅度提高工作效率,目前以应用广泛应用于工程实际当中。本实验平台所采集到螺旋桨的转速、拉力、扭矩和PWM 值最终在设计的LabVIEW 软件中进行显示与保存,上位机采集软件界面如图6 所示。
(1)数据采集
串行通信是将构成字符的每个二进制数据位依照一定的顺序逐位的进行传输的通信方式[12]。LabVIEW 中通过VISA 驱动对下位机进上传数据进行采集。VISA 中函数包括,VISA 配置函数(VISA Configure Serial Port)、VISA 读取函数(VISA Read)和VISA 关闭(VISA Close)。VISA 配置函数将串口的各项参数进行设置,本文中:波特率为115200、8 位数据位、1 位停止位、无奇偶校验位;VISA 读取函数将缓冲区中的数据进行读取,此处需设定所读数据的字节数;VISA 关闭是指当结束数据上传时对串口进行关闭处理。
(2)数据处理
VISA 所采集到的数据是以字符串形式在缓冲区中,此处对采集数据进行处理。应用匹配模式(Math Pattern)并通过设置正则表达式对缓冲区里字符串进行截取。通过分数/指数字符串至数值转换(Fract/Exp string To Number)将字符串数据转换为数值存入数组中。
(3)数据显示与保存
数据的显示通过表盘、垂直指针滑动杆和波形进行显示。表盘和垂直指针滑动杆控件可直接反映出采集的数据,而波形可以清晰的反映出数据的走向。为了实时观察并进行存储与对比分析,设计中选择波形图表控件进行显示[13]。数据保存部分通过写入电子表格,由于在表格中要显示测量时间与日期值,故将数值转化为字符串形式写入数组中,电子表格的字符串长度设为%10f,添加至文件设为T,转置设为F,并将表格保存为xlsx 格式。LabVIEW 上位机软件程序框图如图7 所示。
4 实验结果与分析
在得到无人机动力系统的参数后,通过理论公式对无人机的性能进行分析与计算,此过程在试飞前至关重要,可以使操作者充分了解无人机的相关性能,从而确定无人机实际飞行时的应用范围,增加了无人机飞行时的安全系数[14]。
通过上述关系式与参数计算,结合无人机所选用的无人机动力系统进行装置选择,将实际测量与系统部件和官方提供的数据进行总结,本文中所选用的动力系统装置参数如表1 所示。
实验通过不断改变单片机输出的PWM 信号来改变占空比值,从而实现电机输入电压的变化,所测量的各项特性参数将会保存在上位机中,实验所测量各阶段稳定时的传感器值如表2 所示。

通过前期测量无人机空机重量(不含机载设备)Gz为14.74N,在正常微风状态下,当飞行高度约为15m 时,其平飞阻力系数CD约为为0.228(N·s2/m2),在该高度和温度下将平飞阻力系数代入以上公式中,根据计算并结合相关实际经验计算出无人机的大致性能如表3 所示。
5 结语
本文中设计的实验平台可对多旋翼无人机的动力系统特性进行测试,并通过下位机采集上位机显示与保存方式,形成了一个完整的测试系统。通过多次实验测试,证明了本系统具有测试精度高,操作简单、实用性强、可进行长时间连续采集且效果良好等特点。适用于多旋翼无人机的动力系统安装前的地面测量与调试,通过测量数据计算出无人机的飞行安全性能,为无人机控制算法的设计和辨识建模的研究提供了所需的测量数据,可在实际工程中得到良好的应用。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
航空发动机(2020年3期)2020-07-24 09:03:16
电子制作(2019年9期)2019-05-30 09:41:48
发明与创新·中学生(2018年2期)2018-02-07 20:23:21
时代英语·高二(2017年4期)2017-08-11 07:37:57
天津体育学院学报(2016年3期)2016-12-18 08:24:54
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
广东造船(2015年6期)2015-02-27 10:52:46
中国舰船研究(2014年1期)2014-05-14 06:40:47
