
基于FPGA的永磁同步电机伺服控制系统设计*
2021-10-25 04:58李俊颖杨志军邝俊澎
机电工程技术 2021年9期
李俊颖,杨志军,邝俊澎
(广东工业大学机电工程学院,广州511400)
0 引言
永磁同步电机(PMSM)作为高性能执行元件,广泛应用在的各种交流伺服系统中,包括工业机器人、数控机床、汽车与航空航天等[1-3]。传统伺服控制系统的基于单片机或数字信号处理器(DSP),由于其速度慢的弱点,难以满足高性能伺服的需求。基于DSP/ARM+FPGA的架构可以让FPGA来管理数字接口和进行底层的PWM调制,让DSP或ARM可以专注于复杂算法的计算[4-5],然而这又增加了系统的复杂度,降低了系统可靠性。并且由于DSP或ARM设备串行执行的特性,系统的实时性也难以保证。如今随着FPGA技术的发展,单片FPGA的性能及资源已经能够同时满足高性能数字接口以及伺服控制系统中的复杂运算需求。并且FPGA并行处理、设计灵活、拓展性强等优点也为高速高实时性的伺服控制系统的设计特供了便利。
为了研究和实现高性能伺服控制系统,本文提出了一种基于FPGA的PMSM伺服控制系统方案,以单片FP⁃GA芯片为控制核心,对系统采用模块化设计思想,以硬件描述语言实现伺服控制系统的复杂运算以及各种数字接口的逻辑控制,简化系统的硬件结构,提高系统的可靠性,还具备一定的灵活性和兼容性。
1 PMSM模型和矢量控制原理
永磁同步电机是一个强耦合、多变量的复杂系统,为了简化分析,通常在d-q坐标系下建立其数学模型,因为其既可以用来分析电机的稳态特性,也可以用来分析其动态特性。理想永磁同步电机在d-q坐标系的数学模型为[6]:

式中:Ud、Uq、Id、Iq分别为定子的d、q轴电压和d、q轴电流;Ld、Lq分别为d、q轴电感;ωm为电机的机械转速;Rs为定子电阻;P为电机极对数;ψf为转子永磁体产生的磁链;J为转动惯量;B为粘滞系数;TL为负载扭矩。
电磁转矩方程为:

由式(1)可以看出id、iq与ωm是相互耦合的,由式(2)可知电机的转矩又与id、iq相关,要得到类似直流电机的控制性能,通常采用id=0的控制策略,因此式(2)可以简化为:

可以看出,简化后的电磁转矩方程具有很好的解耦特性,可以视作直流电机,通过控制iq来控制永磁同步电机的电磁转矩。
如图1虚线部分所示,永磁同步电机的矢量控制即通过坐标变换将电机定子电流分解到(d-q)坐标系中,分别对励磁分量(id)和转矩分量(iq)进行闭环控制,再通过坐标系的逆变换和空间矢量脉宽调制(SVPWM)将上述分量转换成实际的电压矢量,从而达到对永磁同步电机的解耦控制的目的。
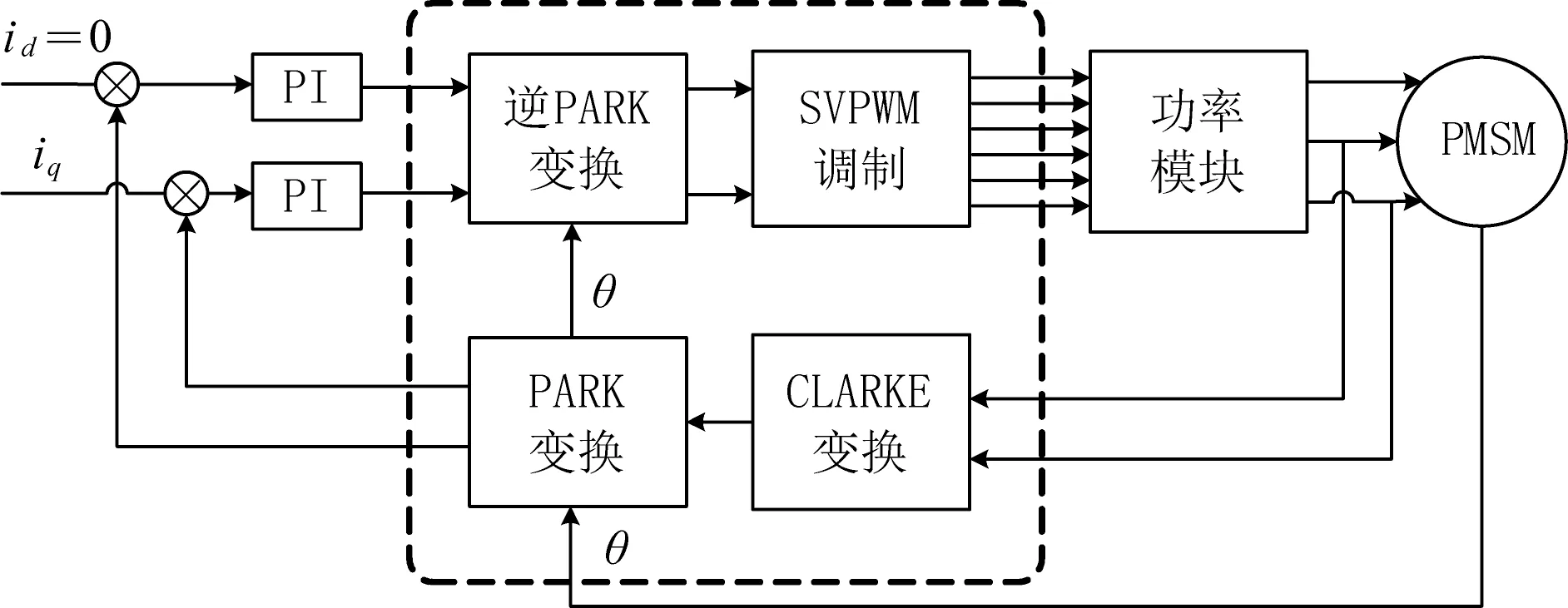
图1 矢量控制框图Fig.1 FOC block diagram
2 FPGA实现
2.1 系统结构
交流伺服控制系统的结构框图如图2所示,该伺服系统主要由FPGA控制板、功率模块、位置检测模块、电流检测电路和永磁同步电机组成。伺服控制和数字接口均在单片FPGA上实现。

图2 交流伺服控制系统结构Fig.2 AC servo control system structure
控制系统主要由通信模块、闭环调节器、FOC模块、模数转换接口和编码器接口组成。系统通过通信模块接收PC上位机下发的指令,并且将系统的反馈信息上传到上位机,通过模数转换接口和编码器接口获取系统的电流和位置转速反馈,结合指令和电机的反馈再通过闭环调节器和FOC模块对电机进行精确的闭环控制。
2.2 编码器接口设计
系统同时兼容增量式编码器和多摩川绝对式编码器,以适应不同的伺服系统。编码器接口模块提供当前的绝对位置,转子角度和转速信息。
对于增量式编码器,输入包括相互正交的A、B两路信号和索引信号Z。转子的绝对位置和角度通过对A、B相的4倍频计数得到,角度信息在每个Z信号上升沿清零。考虑到编码器安装时Z信号未必与转子电角度零位对齐,通过对电机施加特定相电压的方式,可以得到Z信号相对特定电角度的位置偏移信息,在计算转子电角度时减去此偏移值。对脉冲计数值进行处理可以得到转子的转速,通常的转速测量方法通常包括M法、T法、M/T法,其中M/T法综合了前者的优点,可在较宽的转速范围内对转速进行精确的测量,因此本系统采用M/T法进行速度的测量计算。
对于多摩川绝对式编码器,系统在每一个同步信号到来时向编码器发送读数指令,返回的单圈值作为转子的角度信息,再结合多圈值得到转子的绝对位置信息。跟增量式编码器一样,也要考虑编码器与转子电角度零位的安装偏移。
2.3 通信模块设计
系统与上位机通过串口进行通信,包括系统参数的在线修改,编码器的选择,系统指令的下发和系统状态的实时监测都通过通信模块和上位机进行。通信模块设计框图如图3所示,rx_buf和tx_buf分别为接收和发送缓存区,rx_ctrl和tx_ctrl分别对收发进行控制和校验。
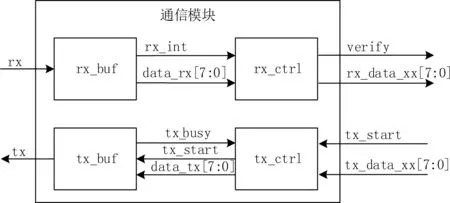
图3 通信模块Fig.3 Communication module block diagram
通信的数据协议如表1所示,每一数据帧包括1位起始位、8位数据位和1位结束位,将功能码1与功能码2相加后取低8位作为校验码。

表1 数据帧结构Table.1 Data frame structure
2.4 坐标变换
坐标变换是永磁同步电机矢量控制的基础,系统对经过坐标变换的(d-q)坐标系电流分量进行控制,再通过坐标的逆变换得到实际的电压矢量,通常包括三次坐标变换。CLARKE变换,即三相静止坐标系(A-B-C)到两相静止坐标系(α-β)的变换,按照幅值不变原则进行变换的表达式为:

因为电机三相电流Ia、Ib、Ic之和为0,上式可化简为:

PARK变换,即两相静止坐标系(α-β)到两相旋转坐标系(d-q)的变换,旋转坐标系的角度为θ,其表达式为:

以及逆PARK变换为:

其中PARK变换及其逆变换涉及到三角函数的计算,通常使用查找表法或数字旋转坐标机(CORDIC)算法,在资源允许的情况下,前者的速度更快。对于正弦函数,0~π与π~2π的函数值符号相反数值相同,余弦函数则是与正弦函数相位相差π/2,因此只需制作正弦函数前半部分的查找表即可,其他函数值可通过地址偏移或符号位取反得到。
2.5 SVPWM调制
SVPWM调制的实现原理在很多文献中都有描述[7-9]。主要是根据逆Park变换得到的电压分量Uα、Uβ,输出六路PWM信号控制三相桥电路合成出需要的给定电压矢量。占空比更新周期为40 μs,与电流环伺服周期同步,降低系统复杂度。针对过调制的情况,设计约束模块,对作用时间按比例缩小,限制电压矢量的大小。同时考虑实际功率模块并非理想器件,需要根据实际情况设置PWM死区时间。如图4所示。
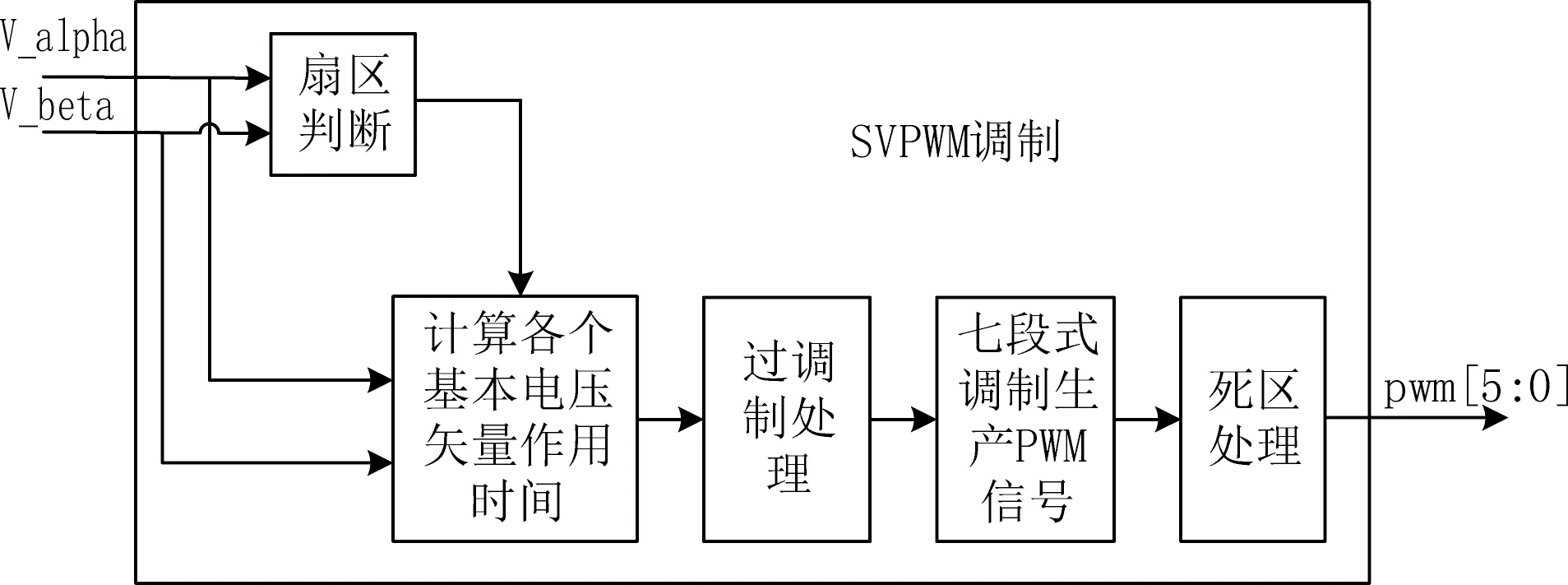
图4 SVPWM调制模块Fig.4 Block diagram of SVPWM modulation module
2.6 闭环控制的设计
本系统包括位置闭环、速度闭环和电流闭环。闭环调节器中,数字PID调节器具有算法简单易于实现、技术成熟、可靠性高、不依赖模型等优点,被广泛应用于控制领域。在伺服控制中,又以P-PI控制,即位置环采用比例(P)控制,速度环采用比例积分(PI)控制,应用最为广泛[10]。引入微分(D)分量,对于实际的离散控制系统来说,容易放大噪声,增加扰动;而积分(I)分量目的在于减小稳态误差,位置到速度这一模型是绝对精确的,但速度到电流的环节会出现建模不准确引入的稳态误差,因此只需要在速度到电流的环节,即速度环加入积分项即可。
离散的PI表达式为:

除了对调节器的整体输出u(k)进行限幅外,对积分部分也进行单独的限幅,可以在积分器输出达到饱和时及时停止积分部分的作用,从而可以实现快速去饱和,减小调节器的超调。
电流环同样采用PI调节器。电流反馈通过电流采样电路后,实际上系统直接得到的数字量I*fdb是电流真实值Ifdb的函数:

式中:K为电流通过采样电路和模数转换电路而引入的系数;offset为采样电路的偏置电压。
若再定义I*ref如下:

将式(9)~(10)代入式(8)可得:

此时,可以将KP/K、KI/K作为电流环的比例增益和积分增益,免去了转化为实际电流值的复杂运算。
3 实验结果
实验使用了ALTERA公司的Cyclone IV E系列EP4CE22F17C8单片FPGA芯片,控制单台使用增量式光电编码器反馈的永磁同步电机。实验使用的永磁同步电机参数如表2所示。
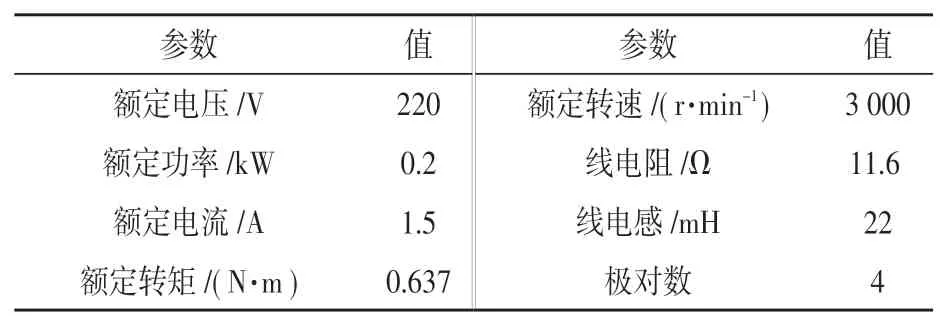
表2 实验用电机参数Table.2 Motor parameters for experiment
图5 所示为系统的位置响应曲线,给定位置为10 000个脉冲,系统能够在0.5 s内稳定在10 016脉冲处,没有出现明显超调,稳态误差小于20个脉冲数。
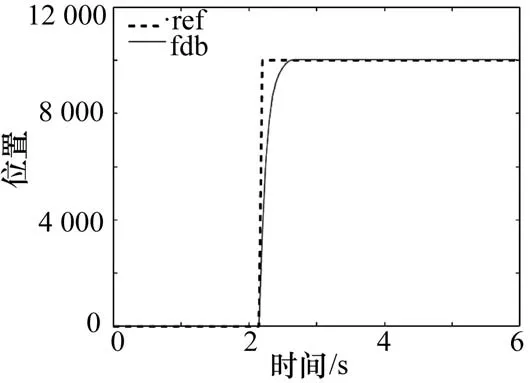
图5 位置响应曲线Fig.5 Position response curve
图6 所示为系统的速度阶跃响应曲线,电机转速从0上升至指令值1 000 r/min的上升时间约为0.1 s,超调量10%左右,能较好地稳定在指令速度附近,在±20 r/min的转速范围内波动。图7所示为系统在正弦速度指令下的响应,电机转速能够较好地跟随指令。综上,可见系统具有较好的稳态性能和动态性能。
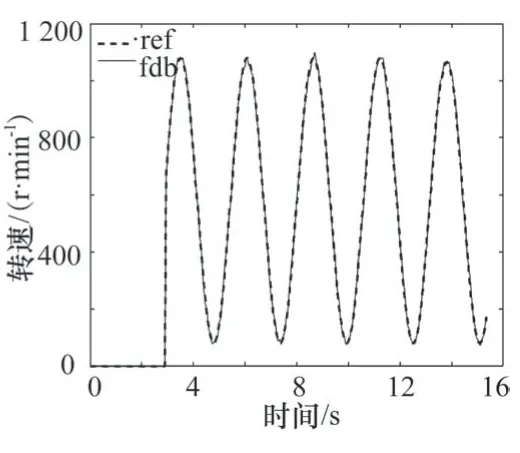
图7 速度正弦响应曲线Fig.7 Speed sinusoidal response curve
4 结束语
本文设计了一种基于FPGA的永磁同步电机伺服控制系统,采用全硬件的方式实现了伺服控制,具有结构简单、可靠性高、拓展性强的特点。系统支持增量式和多摩川协议的编码器,由于FPGA的灵活性和可重构性还可继续拓展更多编码器接口,具有一定的泛用性。通过实验验证了系统具有较好的精度、稳态性能和动态性能。系统电流环控制频率达25 kHz,位置环和速度环达12.5 kHz,可提供更高的闭环带宽,为实现更高精度、更好性能的伺服控制系统提供了可能。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
成都信息工程大学学报(2018年3期)2018-08-29
制造技术与机床(2017年7期)2018-01-19
光学精密工程(2016年3期)2016-11-07
电子器件(2015年5期)2015-12-29
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年13期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
