
基于无人机垂直免像控的1:500 比例尺地形图测绘研究
2021-10-25 03:35星锋锋
科学技术创新 2021年30期
星锋锋
(济宁市勘测院,山东 济宁 272000)
利用无人机摄影测量技术生产大比例尺地形图是目前地形图生产的主流方式之一。传统的垂直摄影测量技术,在获取影像后,需要采集大量的像控点进行空中三角测量的平差解算。这为数据生产带来了一定的成本,同时也影响地形图数据生产的整个进度。随着无人机差分技术的发展,减少甚至免除像控点成为研究的热点之一,已有不少学者在免像控方面做了大量验证。管威[1]等人利用消费级无人机进行免像控数据产品精度的检测,实验表明精度可以达到厘米级;尚海兴[2]等人利用免像控技术,生产大面积风电场的2000 比例尺地形图,结果在精度符合规范要求的前提下,减少了大量的像控点;马海政等人采用拓普康天狼星,从航飞前的航线规划到后期数据生产,精度检测进行了一系列研究,证明了免像控技术生产的数据成果可以满足大比例尺地形图测绘精度要求。然而采用免像控技术生产带状1:500 比例尺地形图数据的案例,目前还很少有,需要探索一套适合的作业流程,并进行有效的推广应用。本文基于此,采用拓普康天狼星无人机,搭载垂直镜头相机,结合已有的DEM 数据,对测区进行仿地飞行,获取分辨率一致的影像。利用目前主流的PhotoScan 摄影测量软件,对航摄影像进行空中三角测量解算,得到高精度的空三加密成果。利用软件自动化生产技术,得到高分辨率数字正射影像图。利用EPS 立体采集模块,对空三加密成果进行立体恢复,在立体环境下进行地形图数据的采集,为了提高采集效率,在正射影像图上进行平面地物的采集,如道路等。对于内业无法生产的区域,外业进行调绘与补测,内业进行数据完善与坐标转换,得到最终的地形图数据成果,并采用大量的检查点对地形图精度进行检测,结果表明:本文的方法,生产的1:500 比例尺地形图精度符合规范要求,可为同行作业人员在处理同类项目时提供有效的参考。
1 免像控技术
免像控技术,是指不使用像控点参与平差运算,目前主要指的是差分技术。差分技术是指:将一台GPS 接收机安置在基准站上进行观测,根据基准站的精确坐标,计算出基准站到多颗卫星之间的距离改正数,并由基准站实时的将距离改正数发送出去。用户接收机在进行GPS 数据观测的同时,也接收到由基准站发出的距离改正数,并不断地对其定位结果进行改正,从而提高了定位精度。这里的用户接收机,在航摄中,就是指搭载的位置记录装备,即通常所说的POS 数据。图1 为差分技术示意图,图中的流动站即指无人机搭载的位置记录装备。
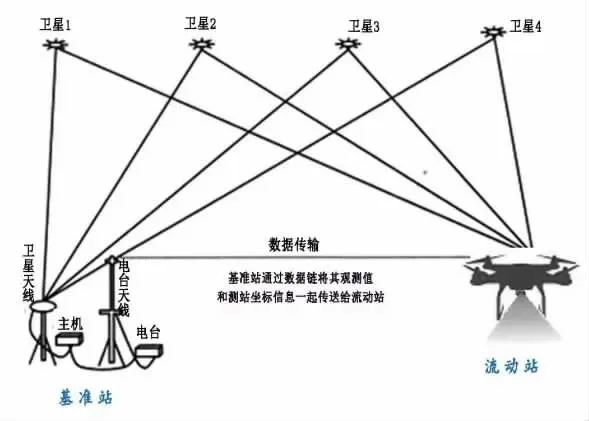
图1 差分技术示意图
基准站获取其到卫星1、卫星2、卫星3 和卫星4的距离,并求出对应的距离改正数,并将距离改正数发送给流动站。流动站获取其到4 颗卫星之间的距离,并通过接收到的距离改正数,对其坐标进行调整,从而得到精确的定位坐标。
就目前差分技术来说,主要分为实时差分和后差分,两种方式均可以获得高精度的POS 数据,这为免像控技术用于测绘产品生产提供了保障。后差分相对实时差分来说,并没有实时的对流动站坐标进行改正,而是在定位观测后,对两台GPS 接收机所采集到的定位数据进行测后的联合解算处理,从而得到接收机所在运动的载体在对应时间上的精确坐标位置。
两种方式最终都可以得到高精度的流动站位置坐标。在数据解算时,会解算得到精度较高的外方位角元素,在实际项目运用中,由于无人机姿态稳定性差,一般只使用其位置坐标,并不使用其姿态坐标。
2 基于免像控技术生产大比例尺地形图作业流程
免像控主要是指在空中三角测量环节,未使用像控点进行平差调整,而是基于高精度的GPS 数据进行平差调整。在生产大比例尺的过程中,主要包括航飞前测区勘察和已有资料收集,空域申请,飞机和相机选择,航线规划和数据采集,检查点测量,影像畸变纠正,空中三角测量解算,空三精度检测,数字正射影像图生产,数字地形图生产,调绘与补测,精度检测,整理与提交,检查与验收等,具体流程见图2。
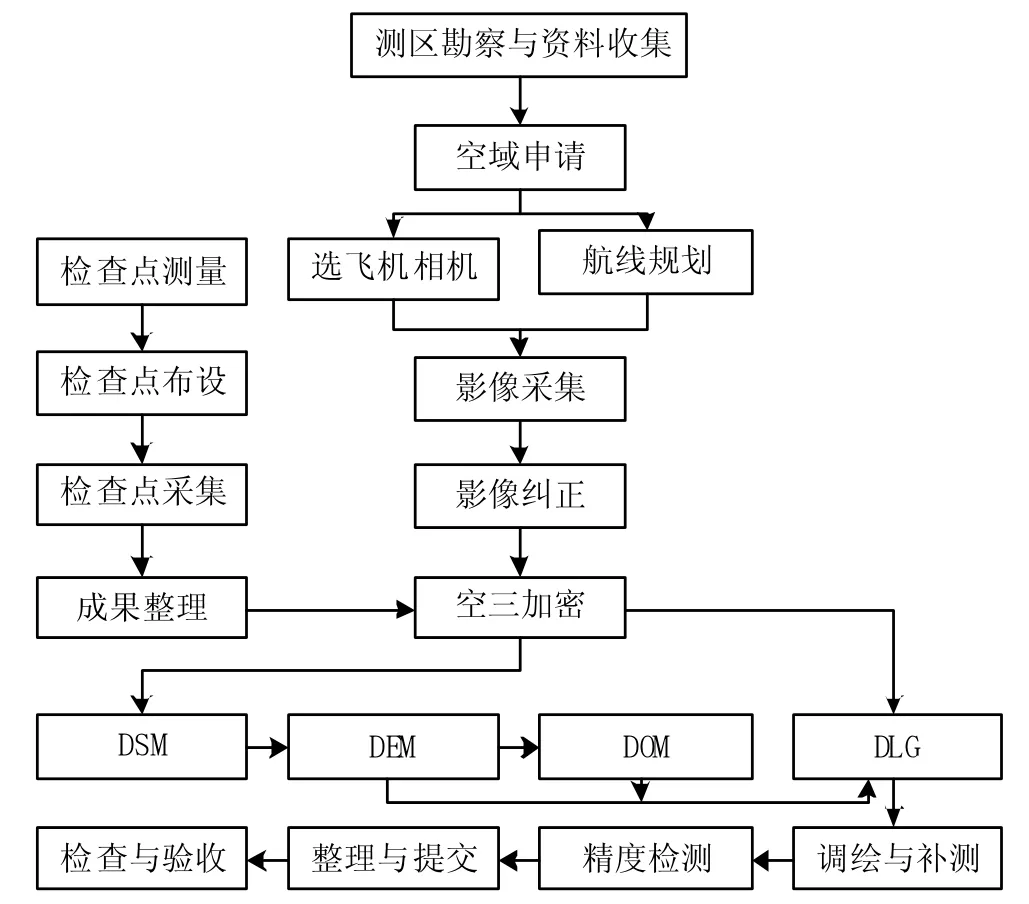
图2 基于免像控技术生产大比例尺地形图流程图
3 项目验证
3.1 检查点测量
结合带状地形和居民区分布,按照均匀布点和居民区加密布点的作业方式进行检查点坐标的布设。利用收集到的3 个D级GNSS 控制点,作为图根控制点测量的起算点,用于GPS-RTK的检核点。利用GPS-RTK 采集平高检查点35 个,用于空三加密成果精度的检测和最终地形图精度的检测。
3.2 无人机和相机选择
结合测区情况和已有硬件设备,选用自有的拓普康天狼星无人机搭载索尼RX1R2 相机用于影像数据采集。相机像幅为7952*5304,理论焦距35mm,传感器尺寸为4.52um。将任务区范围线导入地面站软件中,并导入12.5 米的DEM数据,按照正射航空摄影要求,设置地面采样分辨率为0.045 米,航向重叠度设置为75%,旁向重叠度设置为65%。根据航高、焦距、像元大小和地面分辨率之间的关系,可求得飞行航高约为350 米。在仿地飞行中,相对航高是相对已导入的DEM来说的。理论上来说,仿地飞行是需要结合DSM数据的,但是通过对测区查看,没有突变的地物或者建构筑物,因此这里的DEM数据是可用的,这样飞行,在保证飞机安全作业的前提下,可以获得分辨率一致的原始影像数据,有助于后期空三加密的解算和0.05 米数字正射影像图的生产。
3.3 空中三角测量解算
利用天狼星标配的MAVinci Desktop 输出预处理文件,通过PhotoScan 进行空中三角测量解算。数据预处理,包括删除地面试拍影像,整理POS 数据,对原始影像进行畸变校正等。这里主要是对原始经纬度的POS 数据,在坐标转换软件中,进行坐标数据的转换,转换到和检查点同一套坐标系下,即西安80 坐标系,中央子午线117 度,按照高斯克吕格3 度分带进行投影计算。利用PhotoScan 软件高精度、自动化的空中三角测量模块对影像进行空三加密解算,得到高精度的空三加密成果,像点中误差残差为0.31um,小于规范要求的2/3 像元大小。将检测点导入到空三中,并进行转刺,得到检测点平面中误差为0.163 米,高程中误差为0.182 米,最大平面残差为0.323 米,高程最大残差为0.351 米,最大残差均小于2 倍的规范要求的中误差,成果满足规范要求。
3.4 数字正射影像生产
由于航空摄影属于中心投影,通过影像纠正,需要得到正射投影。按照光是沿直线传播,结合相似三角形和小孔成像可知,由于地形存在高低起伏等问题,获得的影像上的坐标并不是其真实位置,存在投影差的问题。而空三加密得到的成果,是对地表地物进行坐标匹配,得到的数据成果是数字表面模型(DSM),而要使正射影像位置校正到准确位置,就必须将DSM 进行校正,对非地面点进行编辑和滤波,得到精准的DEM 数据,这样才可以获得更加精准的数字正射影像成果。在生产DOM前,利用数字绿土的Lidar360 和煤航的Lidar-DP 点云数据处理软件,对PhotoScan 得到的DSM数据进行多种方式的滤波操作,得到高精度的DEM数据,将滤波后的成果引入PhotoScan 软件中,完成后续单张影像的纠正和镶嵌,得到最终高质量的数字正射影像图成果。
3.5 大比例尺地形图生产
目前利用航测技术生产大比例尺地形图主要有三种方式:(1)利用传统的虚拟立体像对进行地形图采集,该方法对作业人员水平要求高,上手难,部分人员立体切不准,导致测图成果会超限,同时也需要专业的显卡、手轮脚盘等配置,成本较高。(2)平面和高程分开采集,将正射影像加载到南方CASS 软件中,在影像上直接进行地形图采集,采集道路、河流、建筑物等平面地物;将DSM数据导入滤波软件,如LIDAR360、LIDAR-DP 等,通过一系列的滤波操作,去除噪点,过滤掉植被、树木、建构筑物等,得到精度较高的DEM 数据成果,然后利用DEM 采集得到高程点,利用高程点内插得到等高线。该方法对DEM处理要求较高,要求作业人员有较高的DEM滤波经验,能够通过调整不同参数,来获得高质量的DEM成果。(3)将高程和平面叠加后进行采集,类似于目前主流的实景三维模型采集,数字正射影像提供平面信息,DEM提供高程信息,可以实现平面高程一次性采集完成,效率较高,对电脑配置要求也一般,是目前比较受欢迎的一种作业方式[4],但是该方式在生产叠加三维模型时,速度较慢。本次数据生产,利用EPS 软件下的立体测图模块,将空三加密成果恢复后,在立体环境下进行地形图采集,然后将采集成果导出到南方CASS 软件中,进行部分地物信息图层属性的完善,得到最终的地形图成果。在恢复空三时,需要用到相机的内外方位元素和未畸变照片,这样恢复得到的空三精度才可以符合作业需求。
上述三种方式,外业调绘工作量基本上一致。
4 精度检测与统计分析
利用35 个检查点,按照同精度中误差统计方式[5],对地形图精度进行检测。有一检查点平面较差大于2 倍的中误差,但是小于的中误差,按照同精度检测要求,该点也参与中误差的计算,各项残差统计具体见表1。
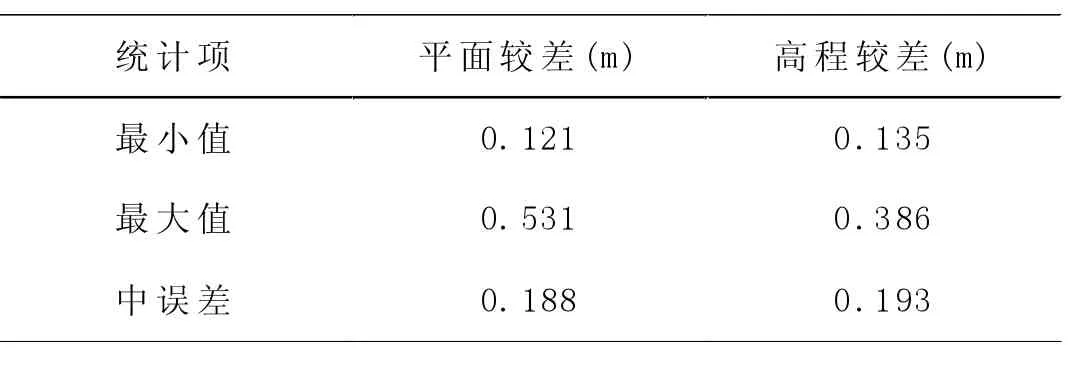
表1 各项残差统计表
通过分析表1 中的统计数据可知,本次生产的地形图,精度满足1:500 地形图精度需求。
5 结论
本文探讨了无人机垂直摄影条件下免像控技术生产大比例尺地形图的作业流程。通过对生产的地形图,按照同精度的方法进行检测,结果表明,本文的方法在免控条件下,生产的地形图精度可以满足1:500 地形图精度要求,可为同行提供一定的借鉴意义。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
计算机系统应用(2022年4期)2022-05-10
扬州大学学报(自然科学版)(2021年6期)2021-02-14
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
电脑知识与技术(2018年18期)2018-11-01
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
计算机应用(2016年10期)2017-05-12
中学数学杂志(高中版)(2016年4期)2016-07-27
中学数学杂志(高中版)(2008年5期)2008-11-24
中学理科·综合版(2008年8期)2008-10-08
