
基于变量集结预测控制的四旋翼无人机控制器设计*
2021-10-25 08:48李佳窈杨奕帆
飞控与探测 2021年3期
刘 斌,李佳窈,杨奕帆,周 镇
(南昌航空大学 信息工程学院·南昌·330063)
0 引 言
近年来,随着技术的发展,四旋翼无人机引起了人们越来越多的关注和重视,凭借其结构简单,飞行灵活,给人类的生活带来了许多便利,如:航拍摄影、火灾救援、农业灌溉、电力巡检等。关于其飞控算法也吸引了大量学者,如常见的PID算法与非线性算法的结合,但是四旋翼无人机是一个多输入、欠驱动、强耦合的非线性系统,一般的控制算法在精度上可能有所不足。预测控制具有处理非线性和多约束的优点,在无人机飞行控制领域引起了广泛关注,如文献[6]中针对四旋翼无人机的容错性,提出了一种预测控制算法作为鲁棒控制系统,能在部分执行器失效时有良好的控制性能;外国学者Soyeon Koo等提出一种线性二次跟踪器与预测控制相结合的控制策略,使得四旋翼无人机能自主降落到运载工具之上。更多的研究结果可参考[8-9]等文献。
一般的预测控制是处理较长时域优化约束问题,在算法的实施过程中,每一时刻的控制序列只有第一个值作为当前控制信号应用于系统中,其他时刻的控制量需要反复重新计算,占用了一定的芯片计算资源,而无人机在空中作业时一般搭载着许多传感器,也需要复杂的计算,两者产生了一定的冲突。为降低预测控制的在线计算量,国内外学者做了一些研究,如集结策略、预测控制在线快速算法等。
针对上述问题,本文提出一种新的预测控制方案,采用变量集结策略并加上终端代价函数与终端状态约束,在保证系统稳定性的前提下使计算量降低,并且一定程度降低系统优化保守性,将此预测控制方案与PID控制相结合应用于无人机的路径跟踪当中,在MATLAB/Simulink下搭建系统模型并验证算法可行。
1 四旋翼动力学模型
由于结构的不同,四旋翼无人机机型可分为“十”字型和“X”型,本文以“十”字型四旋翼无人机进行叙述,在建立四旋翼飞行器数学模型前,做出如下假设:
(1)四旋翼一般为低空低速飞行,忽略空气阻力的影响;
(2)四旋翼飞行器在研究中视为刚体,忽略其弹性影响,总质量m为常数;
(3)机体几何外形完全对称且质量分布均匀,质心与几何中心重合;
(4)每个电机所产生的升力与电机转速的平方成正比;
(5)四旋翼悬停低速飞行时,认为机体欧拉角变化很小,几乎接近0(°)。
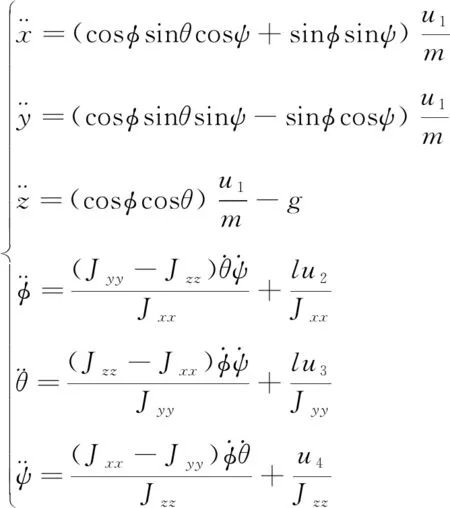
四旋翼的运动过程分为线运动和角运动,对线运动和角运动运用牛顿-欧拉法进行建模得出以下模型


为了方便控制器设计,将四旋翼的飞行状态分为四个独立的通道:上下、横滚、俯仰、偏航,定义控制量为

(2)
其中u
为上下通道控制量,u
为横滚通道控制量,u
为俯仰通道控制量,u
为偏航通道控制量。把式(2)代入式(1)得到四旋翼动力学模型
(3)
2 控制器的设计
四旋翼无人机的控制分为位置控制和姿态控制,为了实现较好的路径跟踪效果,位置控制器采用基于预测控制的控制策略,姿态控制器采用传统的PID控制策略,控制结构如图1所示。

图1 控制器结构示意图Fig.1 Schematic diagram of the controller
图1中外环是位置控制,根据路径发生器给出的三轴参考位置x
,y
,z
和四旋翼动力学模型反馈的三轴位置信息x
,y
,z
,以及三轴的速度信息u
,v
,w
,输出四旋翼无人机上下通道控制量u
和三轴期望姿态角φ
,θ
,ψ
;内环为姿态控制,根据期望姿态角φ
,θ
,ψ
和四旋翼动力学模型反馈的姿态角φ
,θ
,ψ
,输出横滚、俯仰、偏航通道的控制量u
,u
,u
。2.1 位置控制器的设计
外环位置控制器采用了基于四旋翼无人机状态空间模型的预测控制,与应用最为广泛的预测控制算法(动态矩阵控制)不同,由于根据四旋翼状态空间模型设计的预测控制器,模型准确度高,预测值接近于真实值,且状态量大多可测,可以根据状态量的变化主动校准未来时刻的预测值,故不再设计额外的反馈校正。首先根据四旋翼状态空间方程建立预测模型,然后设计预测控制器并对其改进,最后在线优化通过求解目标函数得到控制量并施加到系统。
(1)状态空间模型
将四旋翼位置控制解耦为高度控制和x
,y
方向控制,通过输入量u
可以计算出高度控制量,通过高度控制解算出来的控制量可以计算出x
,y
方向的控制量,因此先要求出高度控制量。

(4)
表示z
轴的状态量,表示z
轴的输出量,表示z
轴的输入量。则高度控制状态空间模型为

(5)
其中

根据公式(3)令
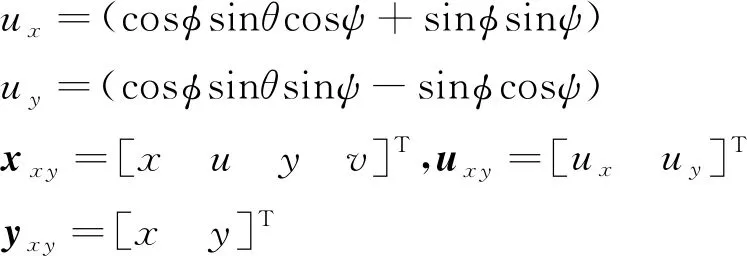
(6)
式中:u
、u
是x
、y
轴的虚拟控制量,是x
、y
方向控制的状态量,是x
、y
方向控制的输出量。则x
,y
方向控制状态空间模型为
(7)
其中

x
,y
方向预测模型设计方法和过程一样,下面仅以高度预测模型为例进行叙述。(2)MPC模型
依据采样周期对上述模型(5)进行离散化为
(k
+1)=(k
)+(k
)(
k
)=(k
)(8)
其中=T
+,=T
,T
为采样周期。定义控制增量
Δ(k
)=(k
)-(k
-1)(9)
则状态变量写成
(k
+1)=(k
)+(k
-1)+Δ(k
)(10)
则系统状态空间方程写成矩阵形式为

(11)


(12)
在式(12)的基础上反复进行递推即可得到系统预测模型,这里直接给出结果

(13)
其中



k
)=[(k
+1|k
)(k
+2|k
) …(k
+N
|k
)]Δ(k
)=[Δ(k
|k
) Δ(k
+1|k
) …Δ(k
+N
-1|k
)]式中(k
)为预测状态序列,(k
)为预测模型输出序列,Δ
(k
)为控制增量序列,N
和N
分别为预测时域长度和控制时域长度,对于上述预测模型采用二次型目标函数求解控制增量序列,该目标函数包括两方面:一是使预测值接近期望值,二是防止控制量变化剧烈从而选择对控制增量加权,具体如下
(14)
其中(k
)为期望高度,和为误差、控制加权矩阵,Δu
max为控制增量系统的最大值,在N
一定的情况下N
越大,系统的控制能力越强,但是该控制器为有约束优化问题,在线计算量大,而且在实际操作当中,只采用当前采样时刻的控制增量Δ(k
),下一采样时刻的Δ(k
+1)需要重复上述过程进行计算,同样会带来较大的计算量。(3)变量集结的MPC
为了减少系统的计算量,在上文的基础上采用了分段衰减集结的策略。将控制时域N
集结为三段,长度为{l
,l
,l
},l
=3。第一段集结序列为前三个采样时间的控制增量;第二段集结序列为与第三个控制增量成等幅衰减序列的控制增量序列;第三段集结序列的选取借鉴双模控制的思想,令控制增量为预测状态的线性反馈。取集结变换的形式为
Δ(k
)=(k
)(15)
则控制增量与集结优化变量的关系为
Δ(k
+i
|k
)=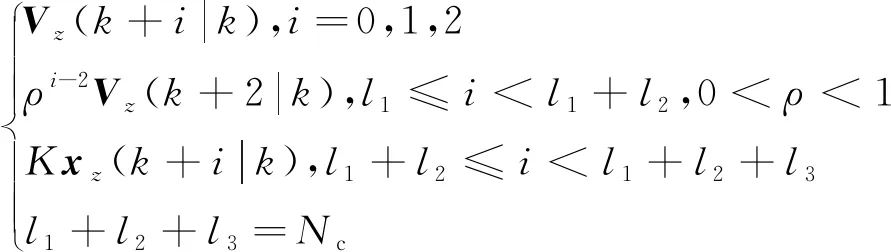
(16)
其中,ρ
为第二段衰减集结序列的衰减系数,K
为预测状态的线性反馈系数,集结优化变量为(k
)=[(k
|k
),(k
+1|k
),(k
+
N
|k
)](17)
式(17)中(k
|k
)=Δ(k
|k
),(k
+1|k
)=Δ(k
+1|k
),(k
+2|k
)=Δ(k
+2|k
),K
参见文献[7]求出。集结矩阵为可以表示为
(18)
将目标函数改写成如下形式

(19)
经如此集结后,优化变量由Δ(k
)变为(k
),前两段控制量在保证性能指标优化的同时通过集结降低了计算量,第三段集结序列降低了优化保守性,尽管性能指标有一定的损失,但由于降低了在线优化变量数目更适合于四旋翼无人机飞控芯片处理。(4)加强稳定性保证的MPC
为了加强系统稳定性,引入终端代价函数和终端状态约束,其中ε
为终端状态约束集
(20)
其中状态加权矩阵通过黎卡蒂方程求解。经过如上设计得到最终的预测控制器目标函数为

(21)
无人机要求其控制器具有实时性。预测控制作为一种有约束在线优化算法,如何降低在线计算量,满足电机、逆变等毫秒甚至微秒级系统芯片的需求,是近年预测控制的一个研究热点,并取得了一些成果。如基于有效集的离线综合/在线分区搜索策略、快速梯度下降法、多路复用技术等,可以在毫秒级的范围内实现系统的实时控制。本文结合上述无人机集结预测控制器的规模及无人机所提供的硬件资源,选择拟牛顿法进行求解,相较于梯度下降法和牛顿法而言,拟牛顿法收敛速度快,且使用正定矩阵近似Hessian矩阵改善了牛顿法每次需要求解复杂的Hessian矩阵的逆矩阵,减少了运算量。求解得到k
时刻的优化变量(k
),从而得到Δ(k
),算出k
时刻的控制量为(k
)=(k
-1)+Δ(k
)(22)
由高度预测控制器(k
)中提出的u
代入x
,y
方向控制器,用同样的方法求解出虚拟控制量u
,u
。上文已解算出控制量u
,u
,由于偏航角变化幅度很小,令期望偏航角ψ
=0,期望俯仰角和期望滚转角由式(6)反解而得,分别为
(23)
2.2 姿态控制器的设计
姿态控制器采用传统的PID控制器,将期望姿态与当前姿态的差值做PID运算得到四旋翼俯仰、横滚、偏航通道的控制量如下

(24)
其中K
P、K
I、K
D分别是俯仰通道的比例、积分、微分系数,K
P、K
I、K
D分别是横滚通道的比较、积分、微分系数,K
P、K
I、K
D分别是偏航通道的比较、积分、微分系数。3 仿真验证
为验证所设计控制器的可行性,在MATLAB上搭建仿真,四旋翼参数如表1所示。
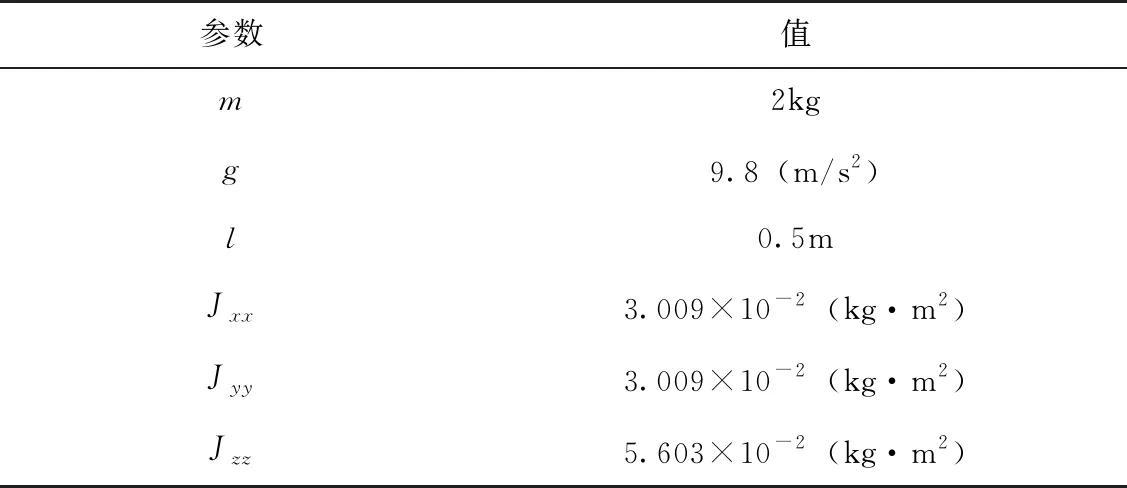
表1 四旋翼无人机参数表Tab.1 Parameter list of Quad-rotor UAV
位置控制器所用参数为:高度预测模型和x
,y
方向预测模型预测时域长度N
均为20,误差加权矩阵分别为=diag(10,1)和=diag(10,1,10,1),控制时域长度N
均为10,控制加权矩阵分别为=diag(1,1)和=diag(1,1),控制约束u
max=25,u
max=10,集结矩阵中衰减系数ρ
=0.
6,终端状态约束ε
=0.
5。姿态控制器所用PID参数为

仿真中给定的输入参考轨迹为

x
,y
,z
三个方向除了开始时因为初始点与参考轨迹有偏差之外,之后在每一个方向都能实现很好的路径跟踪效果,误差几乎为0。从图4四旋翼无人机的姿态跟踪轨迹,可以看出三个姿态角可以迅速地跟踪上期望姿态角,实现姿态的快速响应。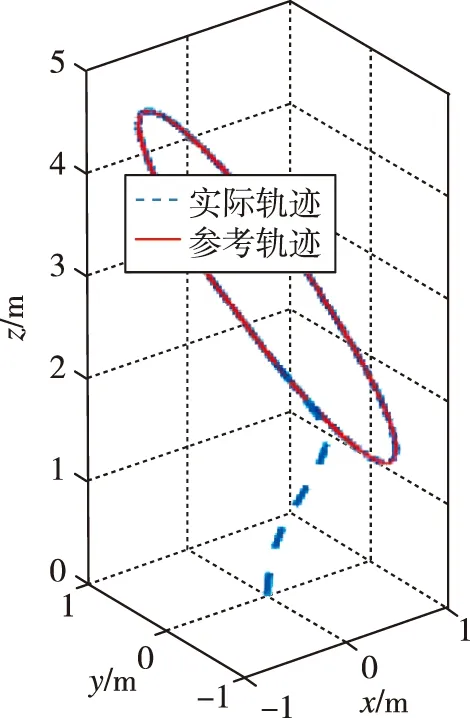
图2 四旋翼无人机路径跟踪三维效果图Fig.2 3D rendering of path tracking of a Quad-rotor UAV
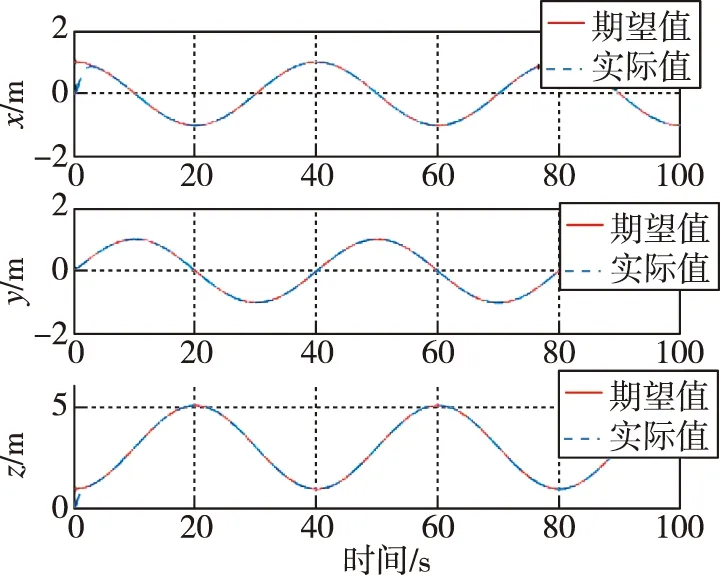
图3 四旋翼无人机x,y,z方向路径跟踪轨迹Fig.3 Quad-rotor UAV x,y,z path tracking
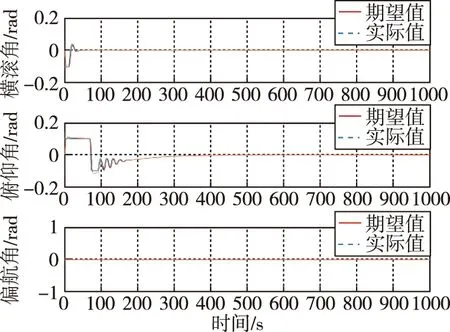
图4 四旋翼无人机姿态跟踪Fig.4 Attitude tracking of Quad-rotor UAV
4 结 论
本文针对四旋翼无人机的路径跟踪问题,以四旋翼无人机状态空间模型为基础建立起预测模型并对其改进,利用分段集结策略降低优化计算量和优化保守性的同时,引入终端代价函数和终端状态约束提升系统的稳定性,以MATLAB/Simulink进行仿真实验验证算法有效性,实验结果表明本文所设控制器在进行路径跟踪时效果良好。
猜你喜欢
航空学报(2022年7期)2022-09-05
财会月刊·下半月(2022年4期)2022-04-25
当代陕西(2022年6期)2022-04-19
直升机技术(2021年2期)2021-06-17
伙伴(2020年9期)2020-11-02
科技创新与应用(2020年10期)2020-04-24
妇女生活(2019年1期)2019-01-17
读与写·教育教学版(2017年10期)2017-11-10
航空模型(2017年3期)2017-07-28
南都周刊(2015年4期)2015-09-10
