
Dynamic Feedback Stabilization for Timoshenko Beam with Locally Input Controls and Input Distributed Delay
2021-10-20 03:26:34WANGXiaorui王小瑞LIUXilan刘喜兰
应用数学 2021年4期
WANG Xiaorui(王小瑞),LIU Xilan(刘喜兰)
( 1.School of Mathematics and Statistics,Qinghai Nationalities University,Xining 810007,China;2.School of Mathematics and Information Science,Baoji University of Arts and Sciences,Baoji 721013,China)
Abstract:In this paper,based on the method of dynamic feedback controller treating the boundary control with delays,we consider the exponential stabilization for a Timoshenko beam with interior locally input delayed controls and input distributed delay control.We design a new dynamic feedback control law to stabilize exponentially this system,and show that the original system is stabilized exponentially.
Key words:Timoshenko beam;Input distributed delay;Dynamic feedback controller;Exponential stabilization
1.Introduction



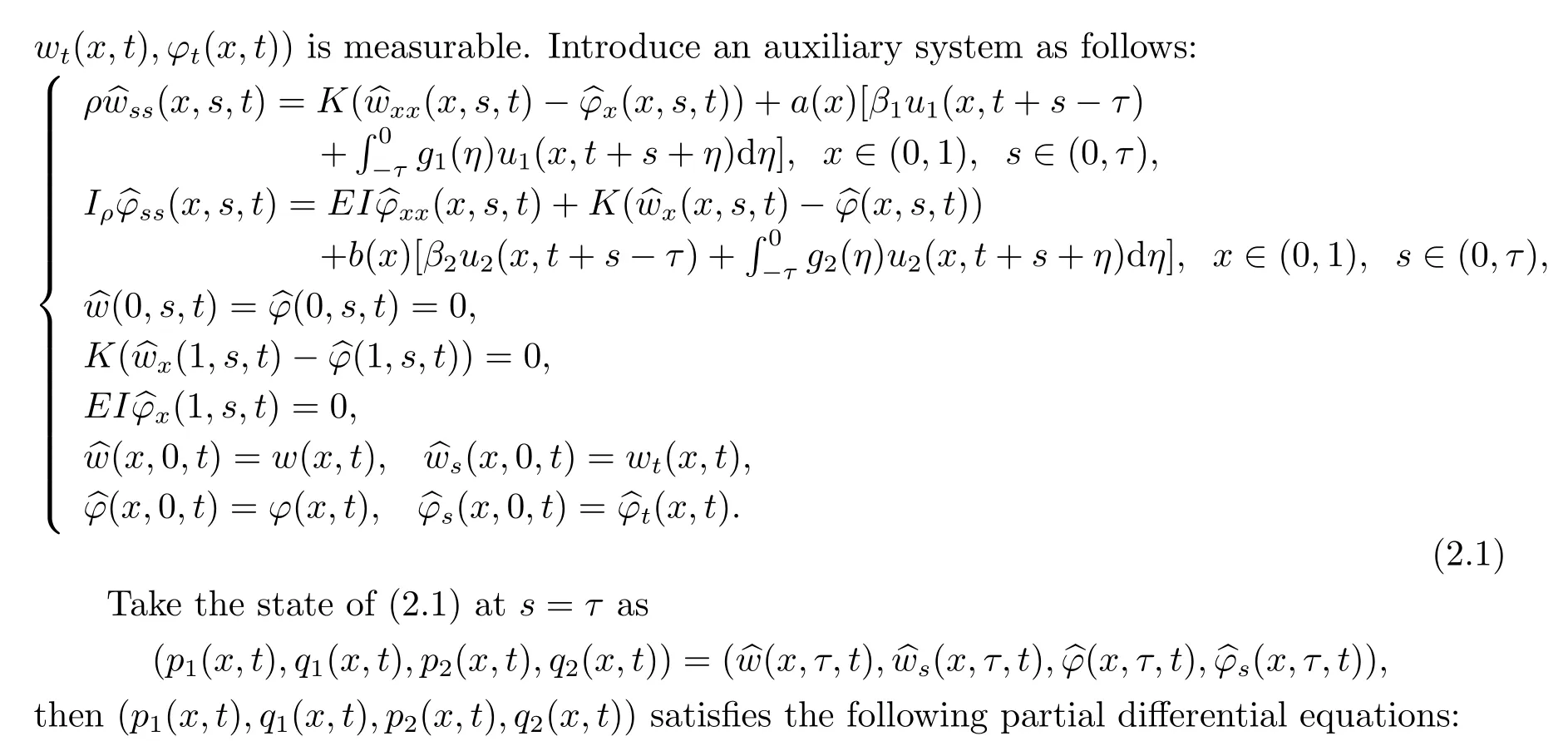
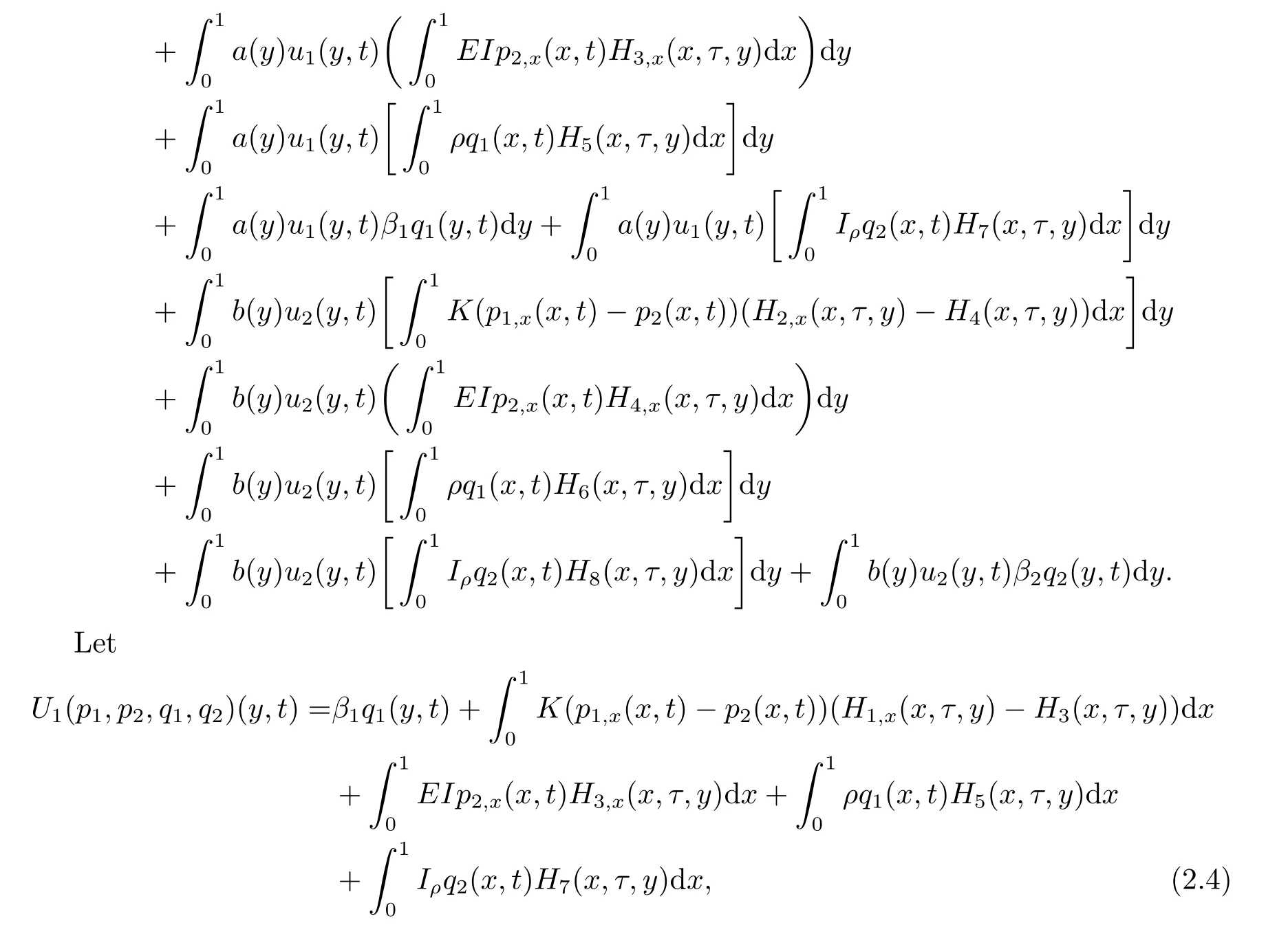
2.Design of Dynamic Feedback Controller





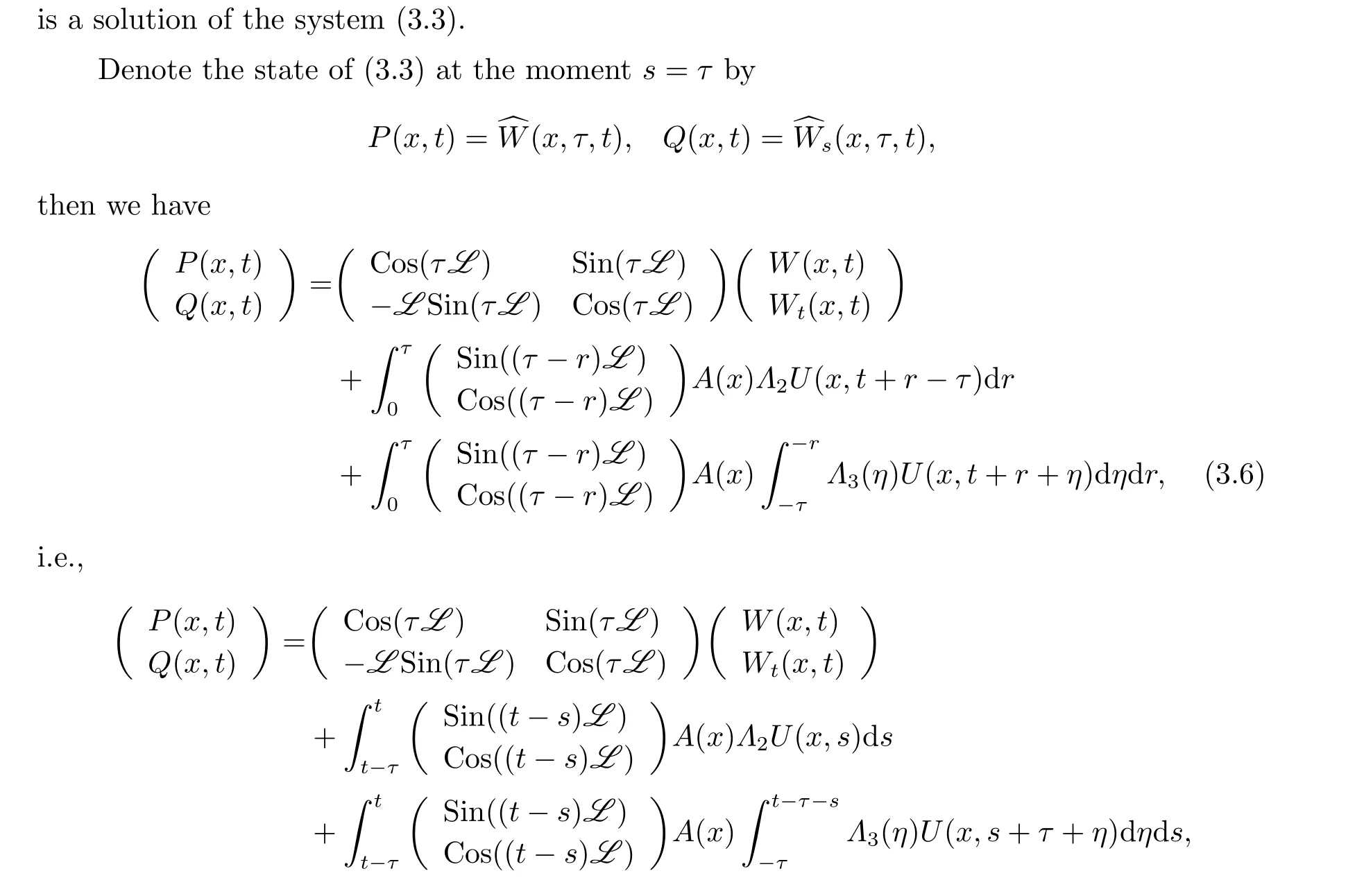
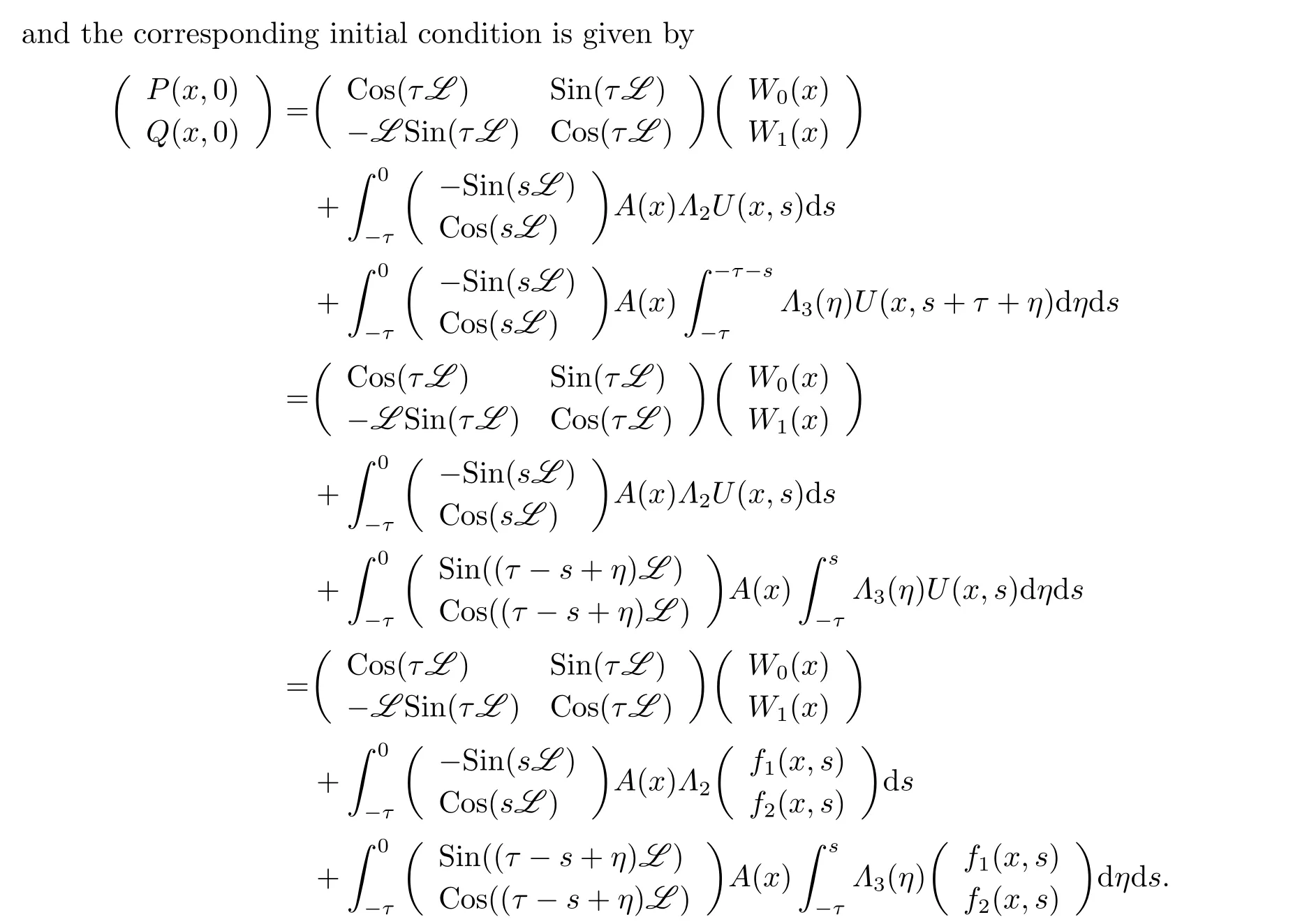
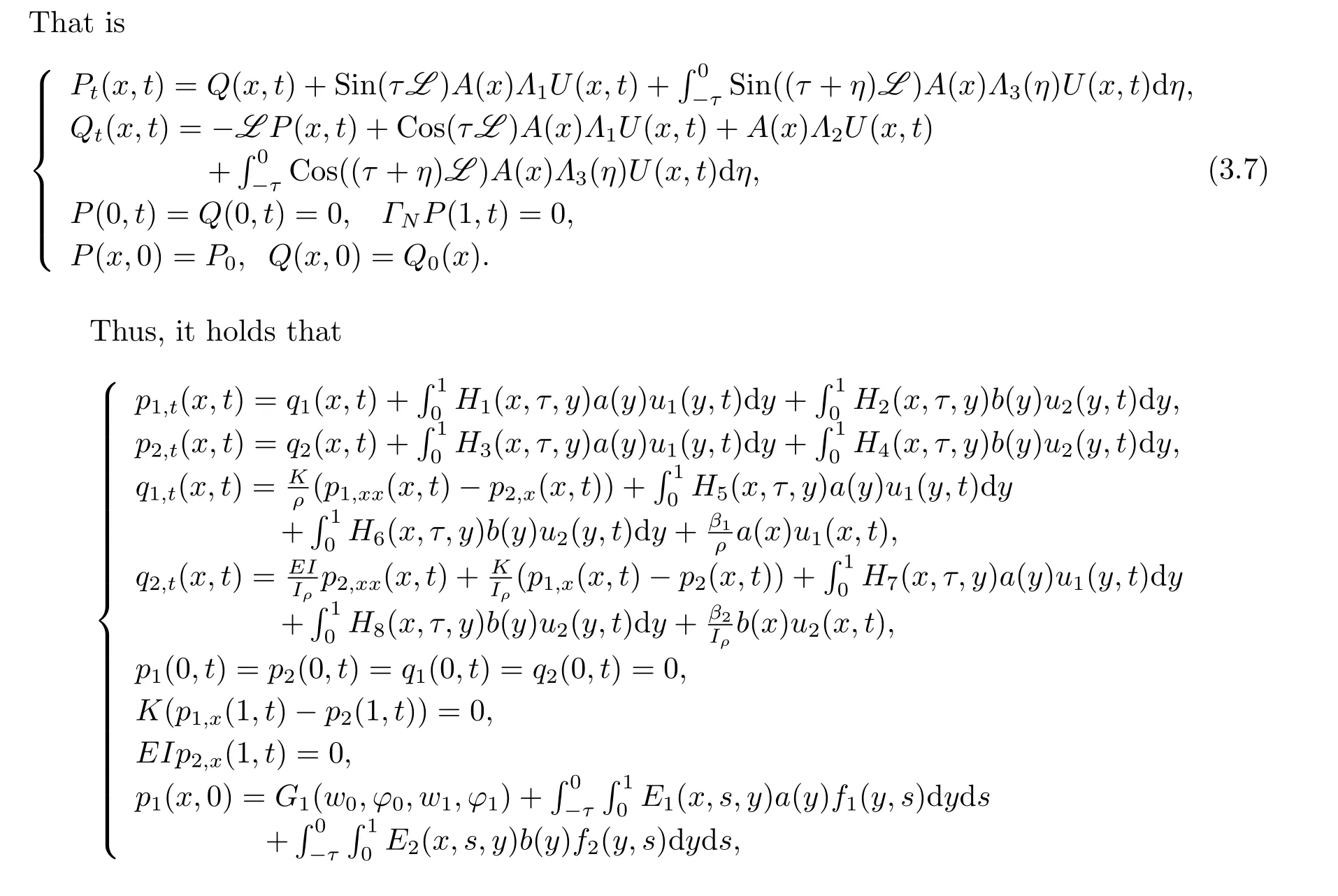
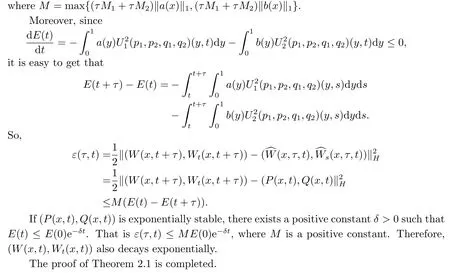
3.Representation of the System(2.2)









4.The Proof of Theorem 2.1


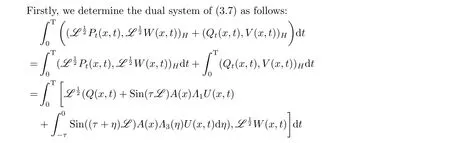
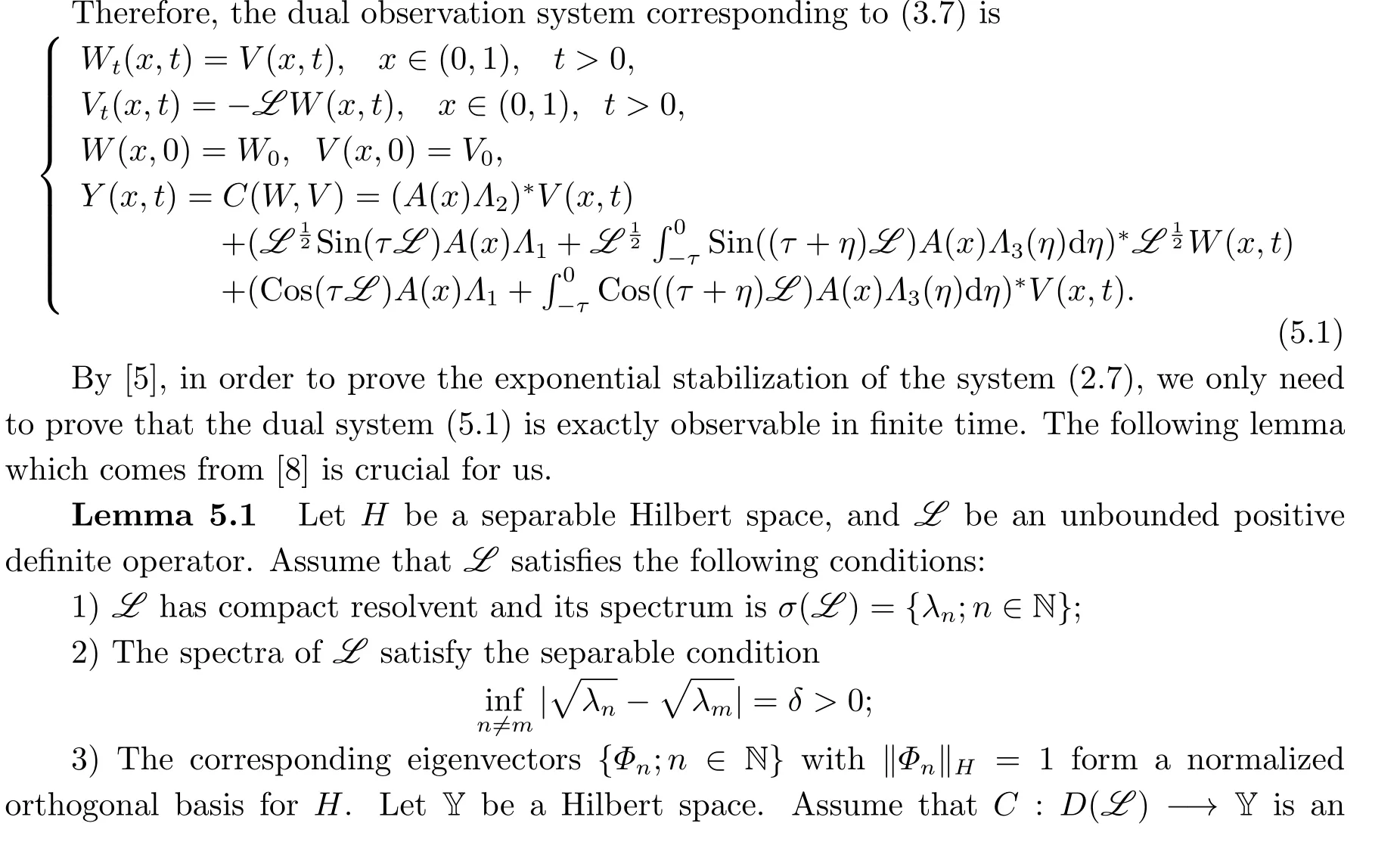
5.The Proof of Theorem 2.2






6.Conclusion
In this paper,we design a dynamic feedback controller to treat the stabilization of Timoshenko beam with locally input controls and input distributed delay.Under this control strategy,we prove that the closed-loop system(2.8)is exponentially stable for any time delayτ >0 by verifying the exponential stability of the system(2.7)on the some certain conditions.We mainly use the exact observability of the dual system in finite time to verify the exponential stabilization of closed-loop system.The approach proposed in this paper can be applied to more complicated models theoretically.
- 应用数学的其它文章
- Global Boundedness and Asymptotic Behavior in a Chemotaxis Model with Indirect Signal Absorption and Generalized Logistic Source
- 一类基于梯度下降的高效分布式计算方法的应用研究
- 通胀风险和最低保障约束下基于二次效用函数的DC型养老金最优投资策略
- 三维不可压磁微极流的投影统计解及其退化正则性
- 一类奇异抛物方程淬火解的数值分析
- Convergence Rate Analysis of a Class of Derivative-Free Projection Methods for Convex Constrained Monotone Nonlinear Equations