
考虑光伏出力不确定性的电动汽车充放电策略
2021-10-19 03:13谭仕奇
重庆理工大学学报(自然科学) 2021年9期
王 毅,谭仕奇
(1.重庆邮电大学 通信与信息工程学院, 重庆 400065;2.国网重庆市电力公司电力科学研究院, 重庆 400014)
近些年来,新能源和电动汽车(electrical vehicle,EV)行业飞速发展,V2G(vehicle-to-grid,V2G)电动汽车日益普及。但不对EV集群和新能源加以控制就接入电网会给系统带来不容小觑的冲击,而采取合理有效的控制策略是解决此类问题的关键[1-4]。同时,由于EV的移动储能特性和环保性,可以消纳多余的可再生能源,因此,协调调度可再生能源和EV更利于智能电网与环境的和谐发展与稳定。目前对EV充放电控制的研究中,对 EV的充放电控制主要通过在时间上转移 EV负荷,控制方式主要分为集中式和分布式。
目前,国内外研究者针对包含可再生能源和电动汽车的电网调度问题提出了很多模型。戴越繁等[3]提出一种考虑电池动态损耗的分层调度策略,分别从电动汽车用户、本地调度机构和配电网控制中心3个角度进行控制。侯慧等[5]根据微电网内部的分布式能源对微电网运行的作用不同,提出一种包括负荷级、源荷级以及源网荷级的分级调度策略,通过仿真验证了分级调度的有效性。杨晓东等[7]为避免集中优化,构造了以EV集群的充放电博弈模型,以光伏利用率、成本为评价指标,验证了该策略的合理性。粟世玮等[8]根据新能源出力大小更改分时电价,由用电成本驱动电动汽车有序充电,以实现新能源的本地消耗。赵兴勇等[9]结合当日可再生能源的出力情况和常规负荷的实时数据,动态制定实时电价信息,充分引导电动汽车参与微电网的调度,仿真证明:该策略能适用于微电网并网和孤网等运行场合。上述研究大多只讨论了可再生能源给电网带来的影响,没有考虑到可再生能源出力的不确定性。
电动汽车控制调度的研究中,主要是通过分配EV充放电时段对EV充放电进行控制,通过集中控制、分层控制和分散控制3种方式协调控制电动汽车的充放电,其中后两者属于分布式控制,这两种控制方式都离不开实时通信系统的支持,一旦调度单元间不能及时通信,相关信息不能及时传递,则难以控制EV的充放电。王毅等[10-11]提出了一种边缘控制方式,由充电桩获取日前的相关信息对电动汽车进行控制:只针对了谷时段的充电策略,在其他时段没有对EV进行控制;没有考虑预测信息的不确定性对结果的影响。
本文中提出了一种在光储微电网下,由智能充电桩自主控制的EV有序充放电控制策略。利用场景分析法考虑光伏出力的不确定性,在控制器中建立以蓄电池和EV综合运行成本、总负荷方差和负荷率的目标函数,建立住宅区配电网日前优化运行模型,求解得到次日各个时段的充放电裕度,将其量化为充放电离线概率表转交给充电桩。在次日控制时段开始后,充电桩获取电动汽车的状态参数和用户需求,依据概率表自主生成本次控制结果并展示给用户选择。
1 场景生成
一般来说,室外温度变化会导致太阳能发电强度的变化以及常规负荷需求模式的变化[12]。例如,在夏季的典型白天,由于对舒适度的追求,家庭用电需求会更高;另外,由于光照强度更强和光照时间更长,光伏出力将更大。这就要求在光伏出力和常规负荷之间考虑一种相关结构,以代表未来可能的场景。在生成场景过程中忽略二者之间的相关性可能会导致在较高光伏出力的情况下常规负荷需求较低。
1.1 拉丁超立方采样
拉丁超立方采样(LHS)是用采样值表示随机变量的一般分布的常用方法。与蒙特卡洛采样相比,LHS在较小规模下也能覆盖所有采样区域,其计算精度更高[13-14],其目的是要保证选取的采样点能覆盖所有范围[15-16],分为采样和排序2个步骤。
1.1.1采样
假设有L个随机变量,Xl(l=1,2,…L)为其中一个随机变量,其分布函数可表示为Yl=Fl(Xl)。LHS的采样示意图如图1。
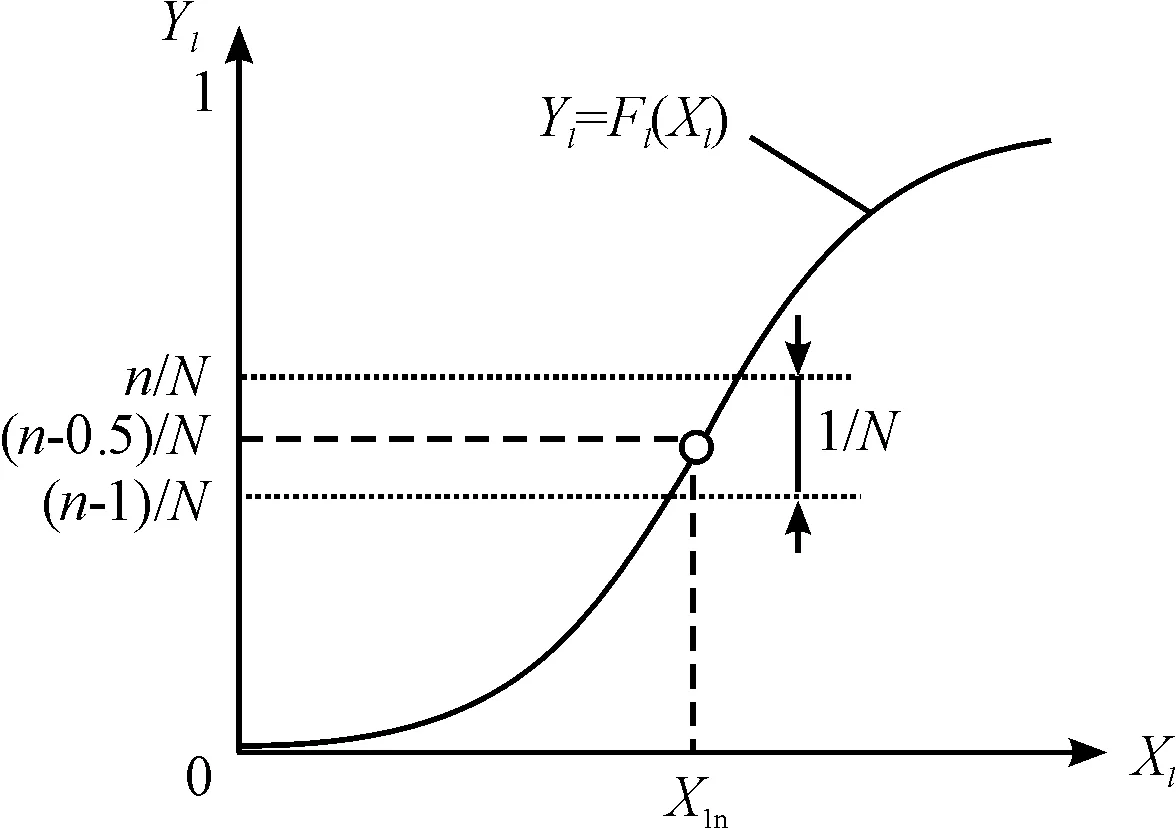
图1 拉丁超立方采样示意图

1.1.2排序
若问题中的随机变量之间存在相关性,则产生的样本矩阵为相关矩阵,因此,需要对该矩阵进行重新排列。 Cholesky分解排序法计算复杂度低且精度高,所以采用 Cholesky分解排序法进行排序,以此产生具有特定相关系数的样本矩阵[16]。
遵循王玲玲等[17]的基于Cholesky分解法的排序过程,考虑到随机变量之间的相关性,可以生成场景共同表示我们的随机参数。
1.2 K-means聚类
K-means聚类算法是一种经典的聚类算法,采用距离判断是否属于一类,即认为2个对象的距离越近,其相似度就越大[18]。本文中由LHS-CD得到2 000组光伏出力序列和常规负荷序列,然后根据K-means 聚类算法筛选出4个小区典型日光伏出力的场景,并用于后续模型计算。
2 日前优化策略
电网运行通常涉及电网损耗等问题,用户通常最关注的是成本,所以分别以负荷率、小区电网总负荷方差、运行总成本作为目标,在控制器中建立日前充放电优化模型,把光伏出力看作负的负荷,与常规负荷叠加在一起,定义为等效负荷。
2.1 目标函数
1) 电动汽车接入后,为最大化利用住宅区配电网的电气设备,则应以日负荷率最大为目标:
(1)
Pdx(i)=PL(i)-PPV(i)
(2)
(3)
式中:x(i)和Pes(i)为优化对象,即优化模型下i时段的最佳充电负荷和储能出力,kW;PL(i)为i时段的常规负荷需求,kW;PPV(i)为i时段的光伏出力,kW;Pdx(i)为i时段小区电网的等效负荷,kW;P0为EV接入后小区电网的平均负荷,kW;T为控制时段,取24 h。
2) 为减小光伏和EV接入电网造成的冲击,使电网安全运行,则应使EV接入后的总负荷方差最小:
(4)
3) 为提高用户参与V2H的积极性和提高经济性,则应使车主充电费用和储能成本最小:
(5)
式中:ci为i时刻的充电单价,kes为储能单元的运行成本系数。
显然各目标函数量纲不一样,因此,对各目标函数进行归一化,将多目标转化为单目标函数F:
(6)
式中:f1min、f2max和f3max分别为小区电网日前预测无序充电情况下的负荷率、总负荷方差和总充电费用。假定在无序充电情况下,EV即到即充,充满即走。其中μ1、μ2、μ3为熵权法求得的各个目标函数的系数[19]。
2.2 约束条件
1) 功率平衡约束
PPV(i)+Pgrid(i)+Pes(i)=PL(i)+x(i)
(7)
式中:Pgrid(i)表示i时刻小区与电网交互功率。
2) 充电总功率约束
(8)
式中:Ppre表示日前预测EV充电总负荷。
3) 光伏出力约束
(9)
4) 储能出力约束
(10)
5) 负荷波动约束
(11)
式中:φ%表示小区负荷波动功率的限制,取φ%=0.6。
2.3 充电桩自主决策
2.3.1生成概率表
对2.1和2.2所提模型进行求解,得到EV充电负荷在时间上的最优分布,将其转化为各个时段的充放电裕度,结合预测信息将其量化为充放电概率表。其中,充电裕度Pc(i)用求解模型得到的优化负荷表示;放电裕度Pd(i)用预测负荷和优化负荷的差值表示[11],定义为:

(12)
式中:x′(i)表示i时段预测的充电负荷。
假设EV充电时长最多为8 h,同理放电时长最多也为8 h,因此,只考虑充放电时长1~8 h的各时段充放电概率表。方法如下:
1) 充电概率表C
C=(c1c2c3c4c5c6c7c8)
(13)
式中:ck表示当充电时长为k,各时段作为充电初始时段的概率集合,k∈[1,8]。以k=2为例进行说明。概率集合c2为:
c2=[c1~2c2~3…c23~24c24~1]T
(14)
(15)
P1=Pc(1)+Pc(2); …P23=Pc(23)+Pc(24)
P24=Pc(24)+Pc(1)
(16)
式中:c1~2和P1分别表示充电时间为1时段和2时段的充电概率和充电裕度值。其余参数同理。通过式(14)求得从各时段起连续充电2h的充电概率表。同理,可求得从各时段连续充电1~8 h的充电概率表,从而得到总的充电概率表C。
2) 放电概率表D
假定某时段的放电裕度大于0,则说明该时段EV可以通过放电减轻小区电网压力。
D=(d1d2d3d4d5d6d7d8)
(17)
式中:dk表示当放电时长为K,各时段作为放电初始时段的概率集合,k∈[1,8]。
放电概率表生成方式与充电概率表相同,需要注意的是如果某时段不满足连续放电的要求,则概率为0。得到充放电概率表之后连同等效负荷通过在线或者离线的方式下发至智能充电桩,实现充电桩自主决策EV充放电的功能。
2.3.2充电桩决策流程
充电桩在EV接入后,可获取相关充电信息[SOCtar,Tle,SOC,W,p],分别为目标荷电状态、离开时刻、初始荷电状态、电池容量、充放电功率。其中前两项为车主输入。由式(17)求得充电时间Tneed和停留时间Tstay。结合充放电概率表[C,D]及预测的等效负荷Pdx自主控制EV的充放电,引导用户参与调控。
(18)
式中:Tback表示EV接入时刻;η表示充电效率;「⎤表示向上取整。充电桩具体工作流程如图2所示。

图2 充电桩自行控制流程框图
首先充电桩需要对EV进行判断,根据是否符合调度条件选择调度模式。
1) 判断条件:
① 放电条件:
EV停留时长大于完成充电需求时长且EV停留时段内包含放电时段,即停留时段内放电裕度总和大于0。
② 先放后充条件:
EV初始荷电状态高于20%且EV接入后的下一时段是放电时段。
2) 调度模式:
① 单一充电模式
充电桩首先保证EV的充电完成时间不得多于EV停留时间。充电桩在充电概率表C中寻找符合条件的且概率最高的时段,从该时段开始充电。若最高概率值不止一个,则比较对应起始时段的等效负荷值,选取等效负荷值最小的时段。
② 先放后充模式
根据式(18)更新充放电时长t1、t2,放电过程中保证SOC在20%以上。在充放电概率表C和D中寻找概率值最高时段,从该时段开始进行控制。
(19)
③ 先充后放模式
由式(19)更新充放电时长t11、t22,以及充电补偿时间t33;其中t33是为了保证能在出行时有足够的电量。同理,在充放电概率表C和D中寻找概率值最高时段,从该时段开始进行控制。
(20)
3 结合天牛须搜索的粒子群算法
采用天牛须搜索(BAS)和粒子群算法相结合的智能优化算法(BSO)对模型进行求解。用天牛代替粒子进行迭代寻优,每个天牛的位置和速度的更新规则与标准的PSO相似,且在迭代寻优过程中都判断天牛的环境空间,即比较每个天牛左右两须之间的适应度函数值,使天牛们朝着更好的适应度函数值处移动。这种方法结合两种算法的优点,稳定性更好,不易陷入局部最优,又避免了BAS算法搜索空间的局限性问题[6]。算法流程如图3所示。

图3 BSO算法流程框图
4 算例分析
4.1 基础参数设置
现模拟某小区微网,其拓扑结构如图4所示。该小区配有1 500 m2的光伏面板,500辆服从本策略调度的EV,且其容量在20~30 kW·h呈均匀分布。假设参与本策略的EV为恒功率充放电,且额定充放电功率均为4 kW,充放电效率为0.95。 假定EV用户每次充电的期望荷电量SOCtar为1,充放电效率均为95%,假设充放电价格一致,小区内的充电桩是具有数据存储和计算功能的智能储充一体式充电桩,可以满足所有电动汽车同时充电。

图4 小区微网拓扑结构示意图
根据文献[4]所提车辆出行特性进行EV充电负荷仿真模拟,其中EV开始充电和充电结束的时间的概率密度函数均符合正态分布函数,即Ton,l~N(17.1,3.32),Toff,l~N(8.92,3.242),每日行驶距离服从对数正态分布,即ln(Dl)~N(3.2,0.882)。根据EV每日行驶距离求EV的初始荷电状态SOC0,计算公式如式(21)。
(21)
式中:Dl为第l辆EV的日行驶距离(km);P100为EV百公里耗电量(kW·h);Ql为第l辆EV的电池容量。
4.2 光伏出力场景
从文献[20]获得全年24 h历史光伏出力数据,根据历史数据拟合出1天24 h的光伏出力概率密度函数,然后通过LHS-CD方法采样,由K-means聚类算法筛选4个典型场景,如图5所示,在光伏出力和负荷需求不确定性的场景下,通过场景分析法,分别对典型场景进行优化,可以将电动汽车充放电优化策略这一不确定性问题转化为多个确定性场景问题。

图5 光伏出力典型场景
通过蒙特卡洛算法对500辆EV进行充电模拟,得到EV无序充电的负荷与小区等效负荷叠加曲线,如图6。由于光伏出力集中在中午时段,所以等效负荷较平时偏低。另外,如果EV不加以控制直接接入电网充电,其充电负荷会集中在居民用电高峰时段,导致“峰上加峰”。小区实行峰谷分时电价,如表1所示。
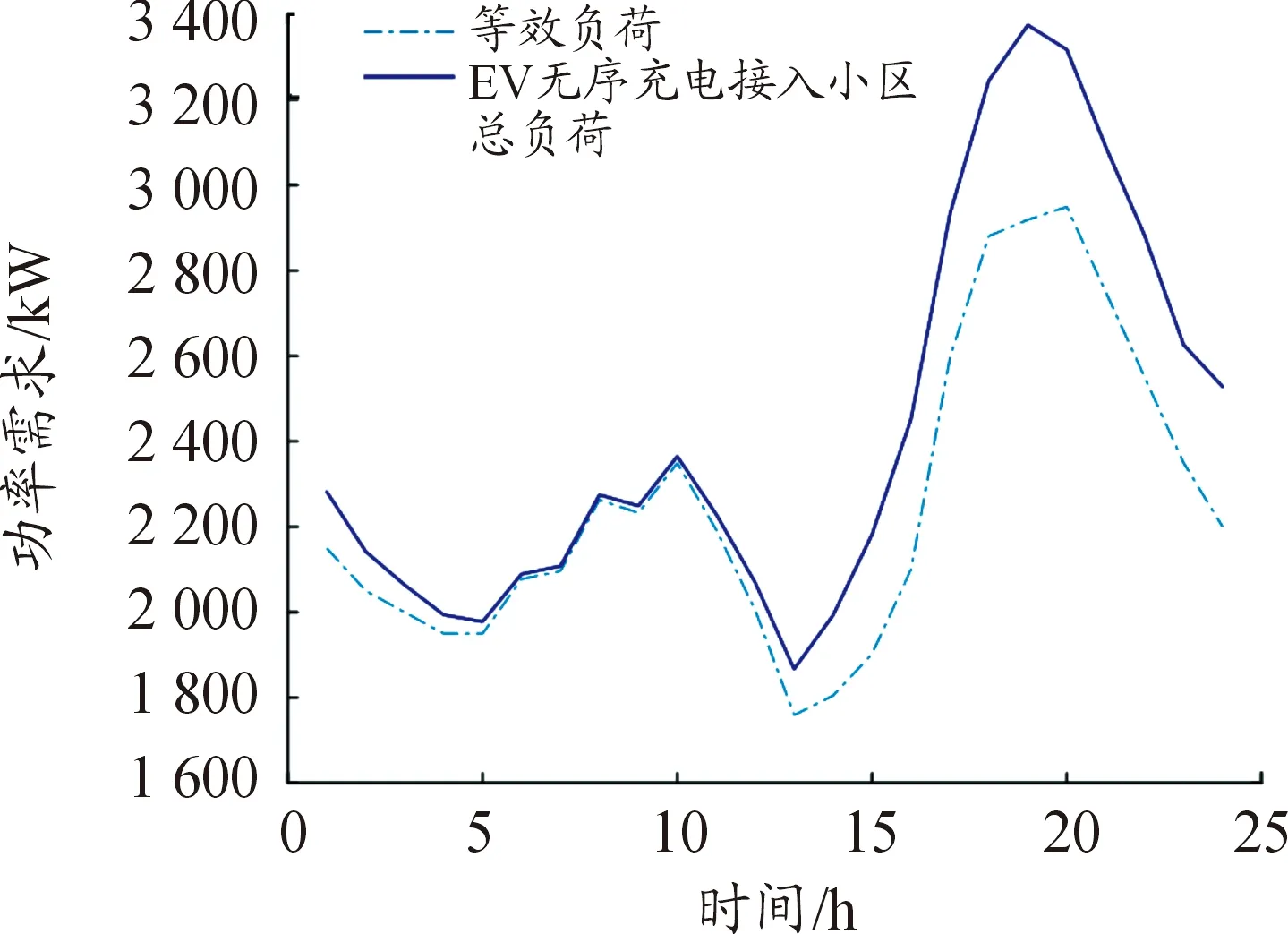
图6 EV无序充电下小区负荷曲线

表1 分时电价
4.3 BSO参数设置
以每个时段的最优充电负荷作为变量空间的维度数目,因此,模型为24维问题。天牛群设为100,迭代次数设为2 000次,使用的算法因子c1、c2分别设为2、3。每次迭代中的学习因子都不同。
4.4 仿真结果
以场景1为例,EV无序充电和两种调度策略有序充电两种情况下接入电网,电网的相应负荷曲线如图7所示。
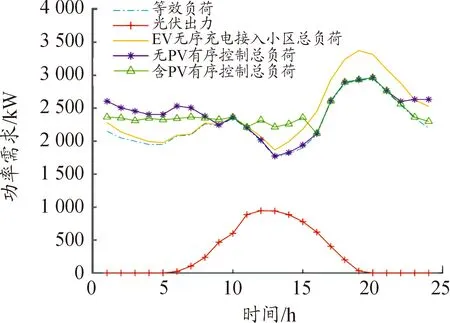
图7 有序充电下小区负荷曲线
从图7可以看出,若EV充电时不加以引导,会导致电动汽车随机充电的充电负荷集中在傍晚用电高峰期,等效负荷曲线峰上加峰,容易造成电网的超负荷运行,引起安全隐患;采用本文所提策略能使EV无序充电负荷从傍晚时期转移到光伏出力高峰期和居民用电低谷期,降低了总负荷峰谷差,平缓了电网总负荷曲线。另外,图7中对比了在建立日前优化模型时对光伏出力不加以考虑时的优化情况,可以看出,虽然也将EV充电负荷从用电高峰期转移到非高峰期,但是相较于考虑光伏加入的调度,小区电网等效负荷曲线更加平缓,更加利于电网的平稳运行。
在EV随机充电情况下和本文中所提有序充电控制情况下的总负荷峰谷差、总负荷方差、总成本的仿真结果见表2。
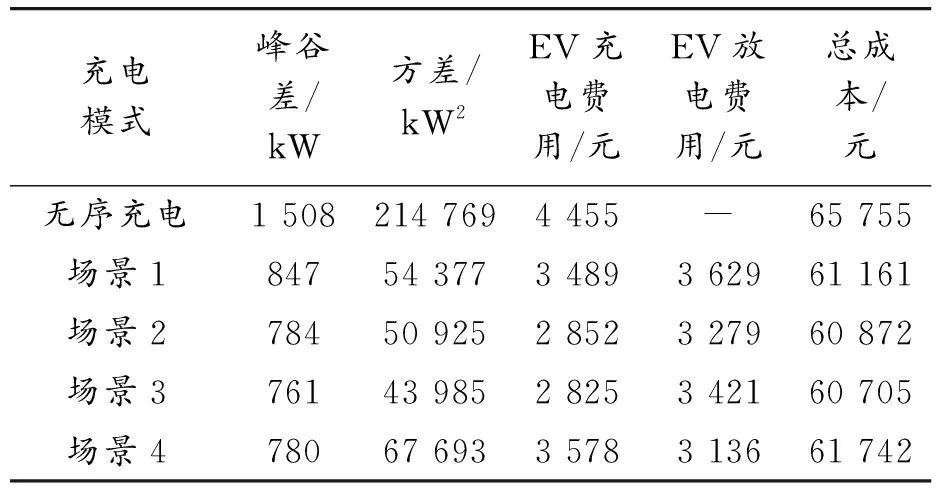
表2 有序充电和无序充电仿真结果
以场景1为例,电动汽车在有序充放电情况下,电网负荷峰谷差降低了43.8%,负荷方差从214 769 kW2降低至54 377 kW2,效果显著,大大缓解了电网负荷的波动,提高了配电设备运行效率;节省运行成本4 594 元,使小区微网运行更加经济化。
5 结论
结合可再生能源出力的不确定性,建立了小区微网中电动汽车充放电的日前优化模型,利用BSO算法求解得到充电负荷在各个时段的最优分布,将其量化为充放电概率表下发至智能充电桩,实现充电桩自主决策对电动汽车充放电的控制;该控制策略在通信故障的情况下也能实现对EV的充放电的控制作用,引导EV充电负荷向高光伏出力时段和小区用电谷时段转移,有助于EV和可再生能源的和谐入网。
所建立模型只考虑了光伏出力和储能单元,未考虑微电网中其他分布式能源的情况,有待进一步完善。
猜你喜欢
发电技术(2022年3期)2022-07-04
无线互联科技(2021年21期)2022-01-10
新能源汽车供能技术(2021年1期)2021-10-14
汽车实用技术(2019年16期)2019-09-11
综艺报(2018年17期)2018-09-14
读写算·小学低年级(2015年7期)2015-08-19
中国高新技术企业(2015年27期)2015-07-30
中国文化遗产(2009年6期)2009-01-11
