
水准标尺全自动检定装置的研制
2021-10-16 16:30欧阳柏添邓洁虹
现代信息科技 2021年7期
关键词:自动控制
欧阳柏添 邓洁虹
摘要:为解决水准标尺检定过程中人工检定效率低、过程易出错、数据可信度低等问题,设计水准标尺全自动检定系统框架,从硬件系统搭建、自动控制系统设计、检定数据智能识别系统开发等方面研制具有检定距离与初始位置自动调节、检定数据智能识别等功能的水准标尺全自动智能检定系统。该系统可大大提升检定效率、减少劳动成本、降低出错概率,实现水准标尺检定过程的自动化与智能化。
关键词:水准标尺检定;自动控制;智能识别;智能检定
中图分类号:P204 文献标识码:A 文章编号:2096-4706(2021)07-0181-04
Development of Full-Automatic Verification Device for Levelling Staff
OUYANG Baitian,DENG Jiehong
(Guangdong Jiangmen Supervision Testing Institute of Quality & Metrology,Jiangmen 529000,China)
Abstract:In order to solve the problems of low manual verification efficiency,error prone process and low data reliability in the verification process of leveling staff,the full-automatic verification system framework of leveling staff is designed. From the aspects of hardware system construction,automatic control system design and verification data intelligent identification system development,a full-automatic intelligent verification system for leveling staff with the functions of automatic adjustment of verification distance and initial position,and intelligent identification of verification data is developed. The system can greatly improve the verification efficiency,reduce the labor cost,reduce the error probability,and realize the automation and intelligence of the verification process of leveling staff.
Keywords:leveling staff verification;automatic control;intelligent identification;intelligent verification
收稿日期:2021-03-09
0 引 言
水準标尺广泛用于大地测量、建筑测量、野外测绘等。随着城镇化进程不断推进,公共基础设施和住宅建筑等基建迅猛发展,对水准测量质量要求越来越高,对水准标尺的测量需求也越来越大。同时水准标尺是测定高差的长度标准,如果水准标尺的长度有误差,则对水准测量的观测结果带来系统误差影响。如何能够高效率、高精度实现水准标尺的检定已经迫在眉睫。基于如此大数量、高精度的水准标尺检定需求,未来水准标尺检定系统必然要往自动化、智能化、高精度、可靠性强的方向发展。
目前国内外针对不同应用对象检定装置的研究都朝着自动化、智能化、数字化方向发展,如照度计自动化检定装置、钢卷尺全自动检定装置等。但关于水准标尺自动检定装置的研究机构很少,能查到的国内对水准标尺自动化检定装置研究的单位目前主要有国家光电测距仪检测中心和郑州测绘学院,他们的研究内容只针对因瓦尺单一类型,然而各类型的普通水准标尺在日常使用中数量巨大,检定工作量大,因此研制水准标尺全自动检定装置(以下简称水准尺检定装置)具有重要意义。
1 水准尺检定装置框架
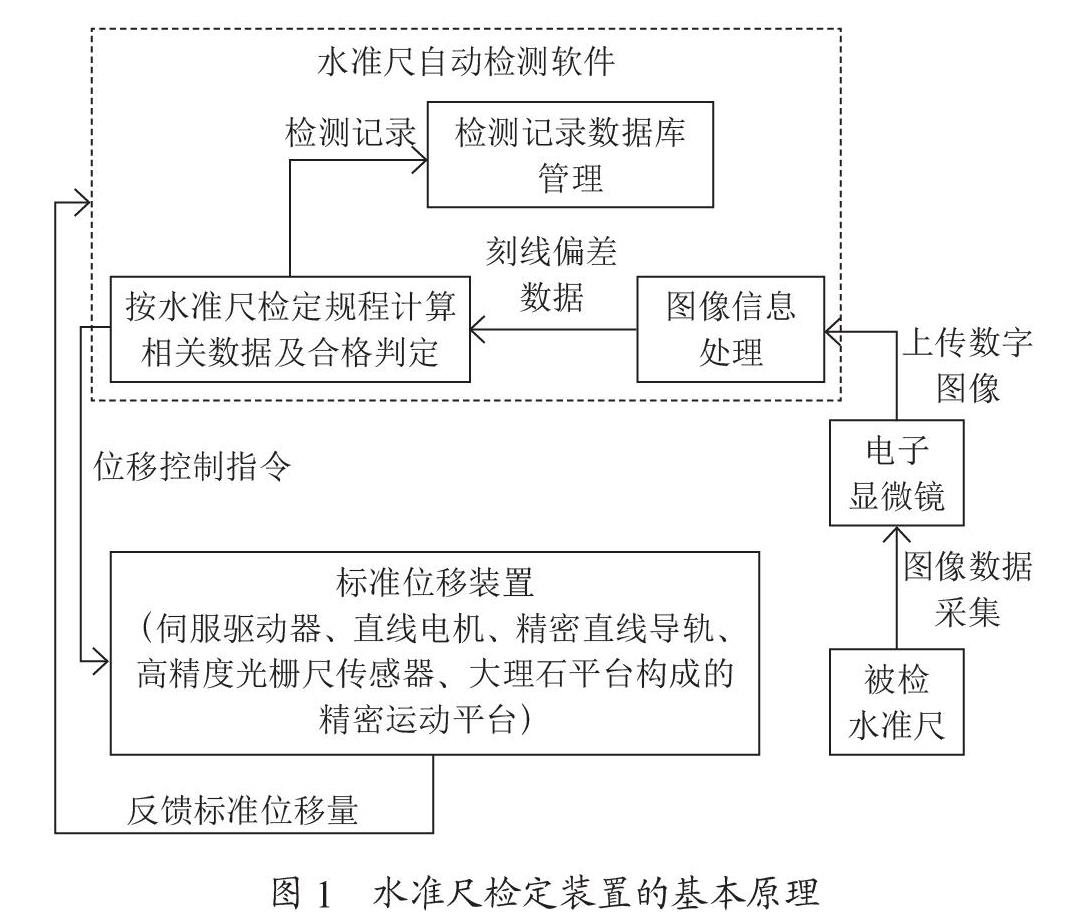
水准尺检定装置的基本原理如图1所示,其检定流程为:
(1)用专门的夹具安装、固定并调整好被检水准标尺。
(2)电子显微镜采集被检水准标尺的线纹的图像信息。
(3)系统处理所采集的图像信息并根据JJG 8-1991《水准标尺检定规程》的要求计算相关数据,作出被检水准尺是否合格的判定。
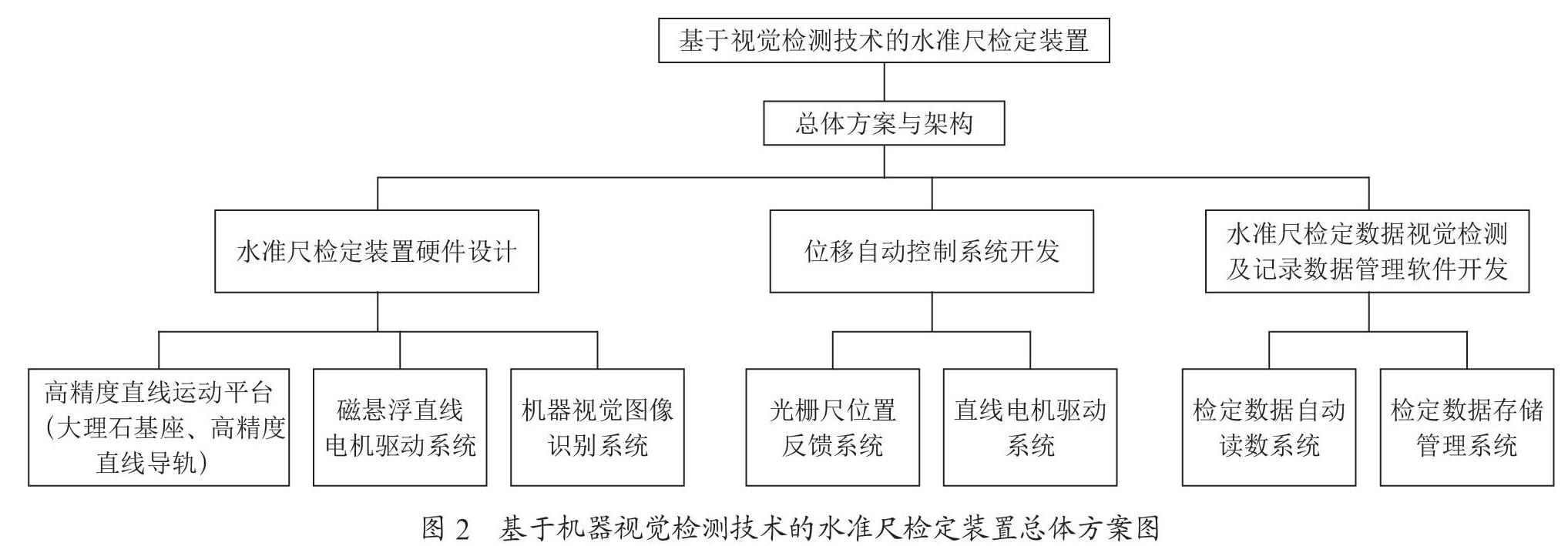
为实现水准尺检定过程的自动化与智能化,本文提出基于机器视觉检测技术的水准尺检定系统研制的总体方案,如图2所示。
本方案主要包含3方面内容:
(1)水准尺检定装置硬件设计。
(2)位移自动控制系统开发。
(3)水准尺检定数据视觉检测及记录数据管理软件开发。
2 水准尺检定装置关键构架分析
2.1 水准尺检定装置硬件设计
水准尺检定装置硬件部分主要包括高精度直线运动平台(大理石基座、高精度直线导轨)、磁悬浮直线电机驱动系统、机器视觉图像识别系统三大模块。
在5.3 m长的大理石基座(要求其直线度达到1级精度以上)上安装高精度直线导轨和高精度的光栅尺,完成运动平台的搭建,配合磁悬浮电机驱动系统,采用机器视觉图像识别系统对水准尺线纹图像进行采集完毕后,系统再分析所采集到数据与光栅反馈位置信号的数据进行比较,可得出被检水准尺是否合格。
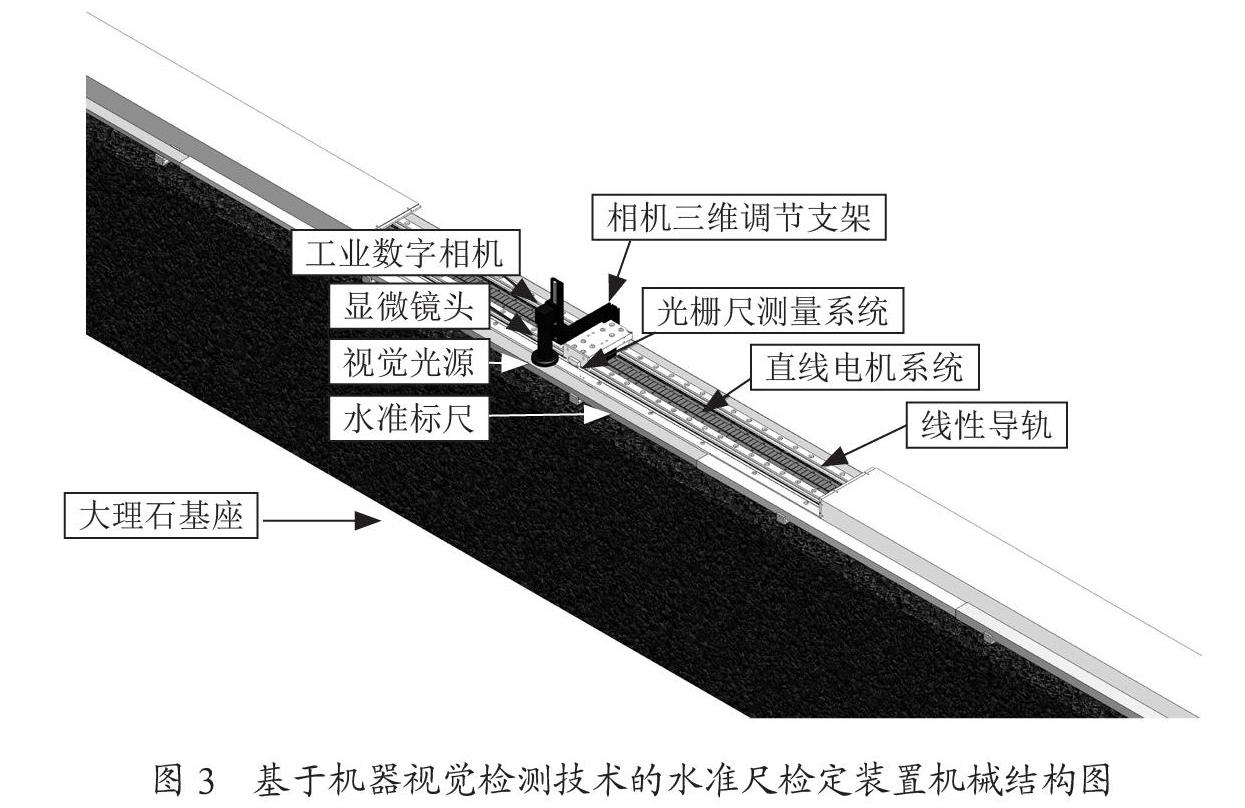
水准尺检定装置机械结构如图3所示,电子显微镜(即工业数字相机)、显微镜、待检水准尺、直线电机系统、线性导轨和光栅尺测量系统安装于大理石基座上,其中待检的水准尺固定不变,电子显微镜安装在相机三维调节支架上,通过直线电机系统和光栅尺测量系统实现水准尺线纹图形读取。为准确读取水准尺线纹图像,首先水准尺的安装固定位置应满足图3中所示的安装方式;其次电子显微镜安装位置也应满足在运动过程中能够在短时间内抓拍清晰的线纹图像,特别是当水准尺的线纹不在一个平面上,同时底平面也不在同一平面上的这种特殊情况时。
上述检定过程中,通过直线电机系统控制,实现上位机对直线电机方向和速度的调控,让电子显微镜采集水准尺不同位置的线纹图像,通过与光栅尺的示值进行比较,得到水准尺各检定点的示值误差。
2.2 水准尺检定装置位移自动控制系统开发
水准尺检定装置的位移自动控制系统由直线电机驱动系统和光栅尺位置反馈系统组成。水准尺检定装置的位移自动控制原理如图4所示,包括水准尺检定位置自动控制和光栅尺光栅信号自动控制两部分。自动控制流程为:上位机通过RS232通信向直线电机驱动器发送指令;驱动器根据指令,驱动直线电机系统中的动子滑块按指令要求的步距、速度、加速度和方向等要求移动,位移的具体位置和定位精度由光栅尺测量系统实时反馈。
上述流程中,通过直线电机驱动器和光栅尺位置反馈系统,实现上位机对直线电机运动方向、速度、步距和加速度的调控,达到水准尺检定装置精确定位自动调节的目的。
2.3 水准尺检定数据视觉检测及记录数据管理软件开发
水准尺检定数据视觉检测及记录数据管理软件开发由检定数据自动读取系统、检定数据存储管理系统组成。水准尺示值的检定数据自动读数系统原理如图5所示,通过电子显微镜拍摄待检水准标尺示值图像;通过USB数据线上传至上位机,上位机根据电子显微镜所摄图像识别待检水准尺线纹值。
水准尺检定数据视觉检测及记录数据管理软件设计。水准尺示值的检定数据视觉检测功能由检定数据自动读取系统完成,系统硬件构成如图5所示。
为得到清晰、可靠、特征明显的被测对象图像,需要专门设计的视觉光源照射待检水准尺表面,待检水准尺的光学图像通过显微镜头成像在工业数字相机的CCD阵面上,工业数字相机通过USB数据线上传转换后的数字图像到上位机,上位机根据工业相机所摄图像识别待检刻线示值。
上位机软件对刻线图像的软件处理过程为:
(1)平滑滤波。通过平滑滤波,有效抑制图像采集时随机噪声干扰,保障识别的可靠性。
(2)图像灰度化。将采集到的彩色图像,进行灰度化预处理。灰度图像是R、G、B三个分量相同的一种特殊的彩色图像,其一个像素点的变化范围从黑到白为255种,所以在数字图像处理中,为使后续图像的计算量变得少一些,一般先将各种格式的图像转变成灰度图像。灰度图像的描述与彩色图像一样,仍然反映了整幅图像整体和局部的色度和亮度等级的分布和特征。
(3)图像二值化处理。图像的二值化处理就是将图像上的点的灰度置为0或255,也就是使整个图像呈现出明显的黑白效果。二值化一般采用OSTU分割法,将图像中特征明显的刻线部分部分分割出来,如图6所示。
(4)图像形态学处理。经过二值化处理后的刻线图像,还可能残存二值化处理没有分割掉的杂点,或者刻线的像素连接部分不理想(断裂或空洞),对图像进行形态学处理,腐蚀掉信息孤立的杂点,填补刻线像素之间的断裂处或空洞部分,完善刻线的特征信息,便于后续刻线统计查找。
(5)图像细化处理。进一步加快刻线查找速度,对图像进行细化处理,使得图像中只留有刻线的中心线。
(6)刻线长度、宽度特征提取。对图像从左到右,从上到下进行像素扫描,按纵坐标统计像素数量。在纵向的投影中,各刻线像素会堆积成一个个有一定宽度,一定高度的像素堆。其中像素堆像素数量最大的就是被检刻线,记录下该刻线在刻线序列中的索引。继续查找被检刻线左侧和右侧刻线的位置。已知被检刻线所在序列索引为i,那么左侧刻线的索引为i-1,右侧刻线的索引为i+1,则被检刻线和左右两侧刻线的横坐标像素位置都可知。
(7)图像像素的当量计算。像素当量就是测量单位像素与实际长度单位之间的对应转换关系,即确定图像测量系统中每个像素代表的实际长度值,实际检定时,被检刻线与两侧刻线的像素横坐标距离是A,对应1 mm(1 000 μm)刻线距离,则像素当量α=1 000/A。
(8)误差值计算。在开始检定时,将相机图像中绘制的十字瞄准线对准被检标尺的零刻线,然后直线电机动子移动标准位移量,相机十字瞄准线横坐标与被检刻线横坐标必然产生像素差值N,则该刻线处的误差值为δ=Nα。譬如:某像素横坐标距离A=59,某个检定点实际像素差值N=17,则该刻线处的误差值为δ=Nα=17×1 000/59≈288(μm)
(9)待检刻线示值误差视觉读数实验。如图7所示:被检刻线读数,软件自动识别读数分别是-0.288 mm和-0.700 mm,与人工肉眼估读结果一致,视觉读数结果真实、准确、可靠。
3 结 论
本文针对水准尺检定领域普遍存在的自动化程度低、人工检定效率低、人工检定数据读取与记录易出错等问题,设计水准尺检定系统。从硬件系统搭建、自动控制系统设计、检定数据智能识别等方面实现具有水准尺检定距离自动调节、水准尺初始位置自动设置、水准尺示值智能检定等功能的水准尺检定装置,最后通过待检水准尺示值预测的实验验证该水准尺检定装置的可行性。
后续将研究待检水准尺检定数据存储、异常数据检测与处理,进一步提高水准尺检定装置的准确性。
参考文献:
[1] 贾激雷,陈晖,傅建中.数控直线电机进给定位误差补偿技术研究 [J].机电工程,2005(7):15-17.
[2] 王魏强,李建双,缪东晶,等.高等别线纹尺中心线提取算法的研究 [J].计算机测量与控制,2016,24(3):196-199.
[3] 吕超群.基于CCD视觉光栅式三等金属线纹尺标准装置的研究 [J].计量与测试技术,2017,44(6):43-44.
[4] 吴玉厚,宋德儒.PMAC下直线电机定位精度分析与误差补偿技术 [J].沈阳建筑大学学報(自然科学版),2005(5):168-172.
[5] 宋涛.基于影像和激光干涉技术的一维线纹检测系统 [J].中国计量,2017(7):92-94.
作者简介:欧阳柏添(1976—),男,汉族,广东江门人,总工程师,高级工程师,本科,主要研究方向:计量测试;邓洁虹(1976—),女,汉族,广东三水人,室主任,高级工程师,本科,主要研究方向:机电一体化。
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年27期)2016-12-15
学苑创造·C版(2016年10期)2016-11-19
科技视界(2016年22期)2016-10-18
科技视界(2016年21期)2016-10-17
科学与财富(2016年28期)2016-10-14
企业导报(2016年12期)2016-06-17
