基于梯度预测网络的气象雷达图像外推算法
2021-10-15 09:12:28张晋文年福东苗开超张亚力
扬州大学学报(自然科学版) 2021年2期
张晋文, 李 腾, 年福东, 阎 庆, 苗开超, 张亚力, 汪 翔
(1. 安徽大学电气工程与自动化学院, 合肥 230601; 2. 合肥学院先进制造工程学院, 合肥 230601;3. 安徽省公共气象服务中心, 合肥 230031)
雷达回波外推技术[1]是进行临近天气预报的重要技术手段.该技术可根据气象雷达探测到的回波数据,确定回波的强度分布及回波体(如风暴单体、降水区等)的移动速度和方向.对气象雷达回波数据经处理后生成的雷达图像进行精准外推可获得2小时内的预测雷达图像,实现对冰雹[2]、飑线[3]、强降水[4-6]、台风[7-8]等突发气象事件的预报和预警.目前的雷达图像外推算法主要分为传统方法和基于深度学习方法[9-10],已应用于稳定性降水预报的传统方法有交叉相关法[11]和光流法等.但在局部强对流天气中,回波发展演变较快,无法满足守恒条件,预报效果会随着外推时间增长而快速下降.除大气及其相关动力过程的复杂性外,对降水预报实时性、规模性、细粒度等需求的日益增长也给气象研究带来新的挑战.在基于深度学习方法中,研究人员改进了全链接长短时记忆网络,提出使用带卷积层的长短时记忆网络(convolution long short term memory, ConvLSTM)进行图像序列外推.韩丰等[12]提出带有时空记忆单元(spatio-temporal LSTM, ST-LSTM)的预测循环神经网络PredRNN作为外推模型架构, 通过对时序雷达数据建模进行预报, 试验结果证实了ST-LSTM结构的有效性和适用性.研究人员又改进并提出了TrajGRU结构, 使用子网络对隐藏状态进行卷积提取光流, 然后对光流进行卷积, 建立动态对应关系.以上研究在雷达图像外推问题上取得了初步进展,但有以下问题有待改善: 第一, ConvLSTM和TrajGRU模型在短时特征提取时仅用一个时序记忆单元提取特征信息,外推图像较模糊,无法根据其灰度值计算降水量; 第二, 文献[12]忽略了长时序预测时遗忘门的门控单元易饱和问题,使时序梯度传递近似于线性变化, 引起梯度消失, 易导致网络模型训练失败.针对以上问题,本文提出一种用于雷达图像外推的梯度预测网络GhuLSTM.该模型引入梯度公路结构(gradient highway unit, GHU)和时空记忆单元变体,拟解决在长序列预测梯度快速消失和短时序内特征提取的问题.通过外推的气象雷达图像,可预计区域气象灾害强度,从而预测路况、发布强气象预警等,减少因恶劣天气造成的损失.
1 梯度预测网络
本文提出的GhuLSTM模型具体结构如图1所示.模型主要包含时空记忆单元ST-LSTM、时空记忆单元的变体结构MIM以及梯度公路结构GHU.模型的第1, 3层为时空记忆单元, 采用该结构构建统一的记忆池用以存储底层的空间结构变量和时序变量, 并以此解决在短时序预测中时空特征提取信息不足的问题; 梯度公路结构作为网络模型的第2层, 用于传输特征变量, 防止其在训练过程中逐渐消失; 时空记忆单元的变体作为模型第4、5层, 在图像序列外推时,对模型的高层隐藏状态建模,它使用MIM-N和MIM-S两种结构替代ST-LSTM中标准时序模块的遗忘门.模型为
(1)
(2)
(3)
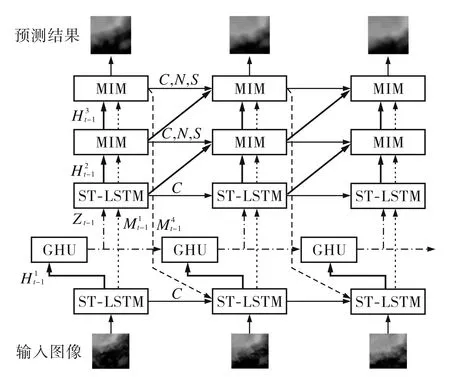
点画线代表梯度公路输出的隐藏状态传输路径; 虚线表示空间 状态张量的传输路径; 粗实线代表隐藏状态张量传输路径.图1 GhuLSTM模型结构Fig.1 The structure of the GhuLSTM model

1.1 时空记忆单元

1.2 梯度公路结构

1.3 时空记忆单元变体结构

2 试验
2.1 数据和设置
本文采用的数据集(https://tianchi.aliyun.com/dataset/dataDetail?dataId=1085)来自2017年深圳气象局与阿里巴巴联合承办的阿里天池比赛(CIKM2017), 数据集的雷达图像包括12 000组, 每组15张, 将雷达反射率因子转换的灰度图(101×101像素)用于外推预报试验.其中, 10 000组图像作为训练集, 其余1 000组作为验证集, 1 000组作为测试集.为采用合理的训练时间和内存实现高质量的外推预测,统一设置GhuLSTM模型的5层结构中ST-LSTM为64通道,GHU为128通道, MIM为64通道,同时将所有的循环单元内部卷积块大小设置为5.
试验须通过48 min的历史雷达图像预测未来42 min内每6 min的雷达图像.将雷达图像序列作为模型输入和样本标签,对原始序列数据以长度为15的滑动窗口、步长为1进行滑动采样,得到包含15帧雷达图的序列样本集,其中8帧作为模型输入,7帧作为模型标签,即模型外推的目标.此条件设定与实际业务场景较吻合,因为在预测雷达图像前,气象雷达会提供近期的雷达探测数据.试验使用2块NVIDIA 1080Ti显卡,通过TensorFlow学习系统训练所有的对比模型,并采用ADAM优化模型loss收敛算法,初始学习率为0.001,batch设为8.对于目标函数,使用L2损失来同时增强生成帧的清晰度和平滑度.
2.2 结果与分析
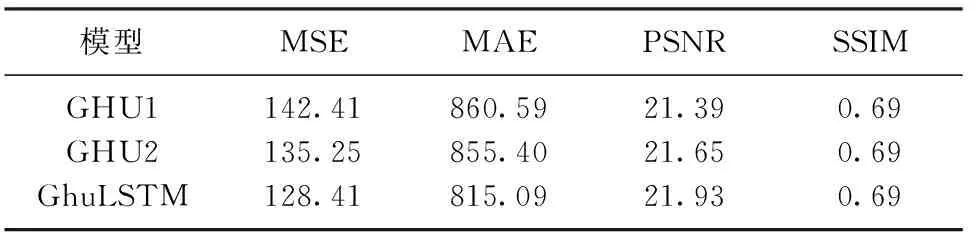
表1 消融实验评价指标比较Tab.1 Comparison of evaluation indexes of ablation experiments
通过数据集外推预测7帧雷达图像的消融实验验证模型结构的重要性, 结果见表1.模型GHU1表示剔除GHU结构的GhuLSTM模型, GHU2为第4、5层用ST-LSTM代替MIM的GhuLSTM模型.表1中的均方误差MSE和平均绝对误差MAE计算的是每帧预测图像和真实图像灰度值相比的变化大小, 数值越小说明预测图像和真实图像越接近; 峰值信噪比PSNR是图像客观评判指标, 数值越大代表失真越小; 结构相似性SSIM也是一种图像质量评价指标,分别从亮度、对比度、结构三方面度量雷达图像相似性, 其取值范围为[-1,1], 数值越大代表失真越小.如表1所示, 模型GhuLSTM的结果最优, 其MSE,MAE,PSNR分别为128.41,815.09和21.93; 而GHU1模型中因缺少梯度公路, 提取的底层图像特征无法传输而丢失, 故导致生成图像的失真, 其MSE为142.41, MAE为860.59, PSNR为21.39; GHU2模型中无MIM结构,无法提取高层的非平稳动态特征信息, 也导致了图像失真,其MSE为135.25, MAE为855.40, PSNR为21.65.去除GHU或MIM结构都会导致网络的预测效果下降,这说明了结构GHU和MIM对GhuLSTM模型的必要性和重要性.
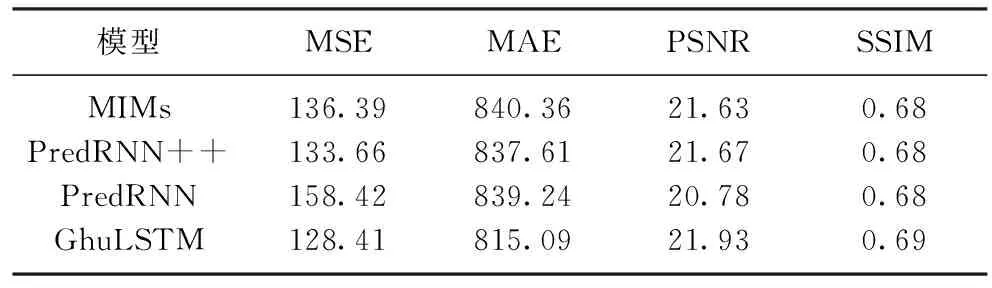
表2 不同模型的外推结果评价指标比较Tab.2 Comparison of extrapolated result evaluation indexes in different models

图2 不同模型的雷达图像外推 结果可视化比较Fig.2 Comparison of the visual effects of different models on radar image extrapolation prediction
表2为GhuLSTM模型和几种主流递归模型预测7帧雷达图像的结果比较.MIMs模型由时空记忆单元的变体构成; PredRNN模型完全由ST-LSTM搭建; PredRNN++模型将ST-LSTM做结构上的级联以加强网络时空状态变量的关系, 再与梯度公路单元做级联形成新的网络结构.由表2可知, 与以上结构较单一的模型相比, GhuLSTM模型的各项指标均占明显优势, 其采用组合结构,有效提高了雷达图像序列外推精度.
为直观展示本文模型的试验结果, 选取PredRNN模型、采用深度学习算法的ConvLSTM模型与本文模型的外推结果进行可视化对比, 结果如图2所示.其中像素值越大,代表雷达反射率越大.由图2可见, 当ConvLSTM模型的雷达图像外推至序列T为15的图像时, 图像已失去细节,十分模糊; PredRNN模型外推的雷达图像与ConvLSTM相比较优, 但图像中间部分出现缺失,说明没有处理好图像的高阶非平稳信息; GhuLSTM模型预测的雷达图像最为清晰, 相较于以上两种算法,其有效改善了外推雷达图像的模糊、失真,回波体外推错误等问题.
3 结论
针对雷达图像外推的深度结构和长序列梯度消失的时空预测难题, 本文提出GhuLSTM图像预测递归网络.本模型通过加入时空记忆单元变体减少非平稳特征信息在提取过程中的损失,保证了预测回波体移动方向的正确性; 通过加入梯度高速公路结构减缓了梯度传递过程中长序列梯度快速消失的问题.消融实验验证了以上两个结构的有效性.与主流的深度循环外推算法的对比结果说明本模型有效提高了雷达图像外推精度,一定程度上缓解了外推雷达图像模糊、失真和回波体缩小的问题.
猜你喜欢
中国农业信息(2023年3期)2023-03-18 08:19:04
四川党的建设(2022年8期)2022-04-28 21:29:35
数学物理学报(2021年6期)2021-12-21 06:24:38
中国农业信息(2021年3期)2021-11-22 06:44:48
小学生学习指导(低年级)(2020年11期)2020-12-14 07:28:10
应用数学(2020年2期)2020-06-24 06:02:50
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:52
作文大王·低年级(2018年10期)2018-12-06 06:22:44
电子制作(2016年15期)2017-01-15 13:39:08
小猕猴智力画刊(2016年5期)2016-05-14 09:21:39