一种基于目标点迹关联的舰载多雷达数据融合系统
2021-10-15 07:25:42陈敬军
雷达与对抗 2021年3期
陈敬军
(海军驻上海地区第七军事代表室,上海 201108)
0 引 言
为了适应现代信息技术和战争形态的发展,近二十年来,多传感器信息融合技术发展迅速[1-10]。数据融合是为了充分利用不同时间与空间的多传感器资源,把来自不同平台传感器的在空间和时间上冗余或互补的数据信息依据某种准则进行组合,以获得被测对象一致性的描述和理解,使该系统较其各个子系统具有更加优越的性能,从而做出更加准确、可靠、稳定的决策。
现代舰艇都配备了多部雷达,但每部雷达只能提供一定空间和时间的目标信息,多雷达数据融合将有效提高平台的目标检测、跟踪、定位性能和态势评估能力[11-16]。受硬件等因素的制约,国内多雷达数据融合研究和应用重点是航迹级融合技术,而点迹和信号级融合技术研究得相对较少。在公共计算平台加速推进的大背景下,本文给出了一种工程化的新型舰载多雷达点迹融合系统方案,简单介绍了点迹融合技术的实现方法,并对提出的多雷达点迹融合系统的性能进行了讨论。
1 总体方案
1.1 点迹级融合优势
多雷达数据融合可以选择对信号、点迹和航迹三个层次的数据进行融合:信号级融合处理雷达的回波信号;点迹级融合处理各个雷达经目标检测处理后得到的点迹信息;航迹级融合处理各个雷达经检测跟踪处理后得到的航迹信息[9]。
信息提取过程往往会损失部分原始信号信息,通常每经历一次信息提取就会损失一部分原始信号信息。信号级融合的层次最低,因为信息提取带来的信息损失最少,能够最大限度地利用原始信息,可实现检测、成像等更多样的融合处理,但是时空配准要求高,通信与信息处理代价最大,实现复杂度最高。航迹级融合的层次最高,但各雷达在形成目标航迹的处理过程中已经丢失了大量的原始信息,通过航迹融合大幅提高系统性能会有一定的限制,但是融合处理实现最简单,只需要各雷达输出目标航迹等数据即可,通信和信息处理的代价最小,基本上无需改动现有的雷达硬件。
点迹级融合的层次居中,付出的代价不大,但能明显提升系统的性能。点迹融合的点迹信息量非常丰富,目标点迹是各雷达目标检测的结果,却是目标跟踪、轨迹提取等后续处理的输入[1]。在点迹级融合,除了无法形成原始图像外,系统不仅可以充分利用各雷达点迹包含的丰富信息来提高目标检测概率、定位精度和空间覆盖能力,而且可从多个方面提高目标跟踪性能。通过对多雷达点迹串行处理,目标点迹更新速率加快,从而大大提高航迹起始速度和对机动目标的跟踪能力。在点迹级融合不需要传输各雷达之间的海量原始数据,数据通信量少,实时性要求相对较低;同时可以支持各雷达单元独立并行处理,在不影响现有多雷达系统主要架构的情况下完成点迹信息的融合,具有在系统改动较小的情况下充分利用点迹信息融合大幅提高系统性能的潜力。在大力推行舰船网络一体化和公共计算平台的背景下,在点迹级进行多雷达数据融合是可行的理想选择。
1.2 系统总体方案
图1给出了舰载平台的多雷达点迹融合系统的信号流程:系统首先对接收到的各个雷达的点迹数据进行空间配准,统一测量坐标系。如果雷达数据包含目标多普勒速度,则利用外推法进行时间配准,接着将时空配准后的点迹数据进行目标点迹融合,然后利用融合后的目标点迹进行航迹起始、航迹关联、航迹滤波更新,并输出最终航迹跟踪结果。如果雷达数据不包含目标多普勒速度,则根据多雷达测量值的时标进行排序,依次利用多雷达测量值进行航迹起始、航迹关联、航迹滤波更新,并输出最终航迹跟踪结果。
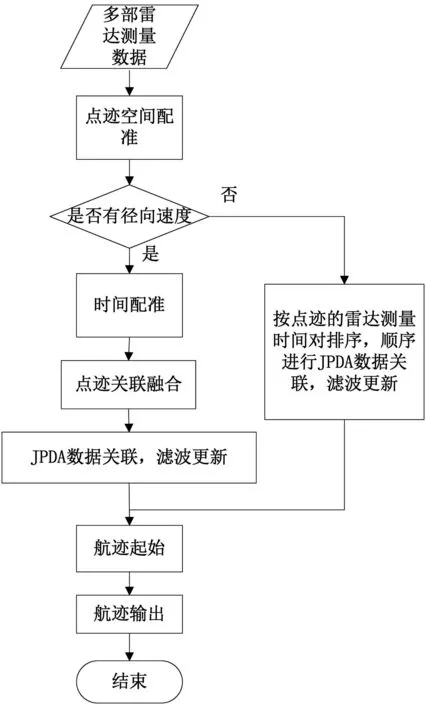
图1 整体实现方案
2 系统实现
2.1 空间配准


(1)
(2)

(3)
易得直角坐标系下的多普勒分量为
(4)

2.2 时间配准
时间配准是将多部雷达的时间对准到一个时间基准上[1]。时间基准的选择可以根据实际情况确定,但通常以融合中心的时间作为时间基准。时间配准方法有多项式插值法、外推法等。
多项式插值法的基本原理是利用有限的点迹数据对目标短时间内的运动轨迹进行逼近:先将目标多个时刻的数据拟合得到一条曲线,然后计算出曲线上时间基准对应的点上的数值。多项式插值法需要多帧点迹的数据关联,相当于点迹时间配准前进行航迹起始的处理,使得时间配准复杂度相对较高,并且时间配准具有一定的滞后性。为了避免时间滞后和航迹起始问题,系统只对有多普勒速度的点迹数据利用外推法进行时间配准。
外推法是一种简单易操作的时间配准技术。以两部雷达为例,设雷达1、2的采样周期分别为T1、T2,融合中心的处理周期为T(T可以选T1或T2),则外推法的处理步骤如下:
(1)在当前融合中心处理时刻t,取所有未处理的雷达1、2的空间配准后的点迹;
(2)将所有未处理的雷达1、2的点迹外推,得到当前融合中心处理时刻的时间配准点迹。


(5)

(6)
由此得到点迹t时刻的坐标为[x,y]。
需要注意的是,由于一般只能得到点迹的多普勒速度信息,即以测量雷达为坐标原点的径向速度信息,无法得到准确的速度信息,上述外推法只能得到目标的径向位移,目标的角度假设不变。在对准时利用多普勒信息估计目标的运动速度,由于多普勒速度存在模糊,利用多假设方法进行配对,再根据匹配结果进行外推。
2.3 关联算法
关联算法包含不同雷达点迹之间的关联和融合后点迹与航迹的关联两部分。
不同雷达点迹之间的关联用于判断同一时刻多雷达的点迹是否属于同一目标,主要利用目标点迹之间的位置关系。不同雷达所观测的同一目标的点迹都分布在目标真值附近,相距较近。不同雷达的作用距离和定位精度是不同的,即使是同一雷达在不同距离上的定位精度也是不同的。在多雷达点迹关联过程中要考虑各雷达的监控区域、定位精度和作用距离以及点迹的空间位置等因素。雷达性能已知的情况下,可以把定位精度高的雷达点迹优先假设为目标点迹,然后利用数据关联方法将其他点迹与目标点迹互联,直至所有点迹关联完毕。考虑能够得到实时互联结果,同一目标对应的多雷达点迹数据互联方法可选用最近邻方法和全局最近邻方法。
融合后点迹与航迹的关联采用联合概率数据互联算法(JPDA),根据不同雷达的测量协方差矩阵,采用椭圆关联波门,并按照卡方分布概率密度函数以及设定的概率门限进行设置。
2.4 点迹融合
将多雷达的目标点迹与目标关联以后,后续目标跟踪方法可以分为两大类:一类将同一目标的多雷达点迹数据进行合并压缩和/或串行处理,然后利用单雷达目标数据关联算法进行处理[13];另一类利用在单传感器数据关联算法基础上发展出来的多传感器联合概率数据互联算法(MSJPDA)等,直接处理同一目标的多雷达点迹数据。

(7)
2.5 航迹起始和删除
利用点迹与点迹的互联实现航迹起始。常用的航迹起始方法有直观法和逻辑法等[1],其中直观法是最简单的航迹起始方式,只利用速度限制和加速度限制来起始航迹;逻辑法不仅利用速度信息起始航迹,而且利用航迹和点迹的误差信息进一步确定起始航迹。逻辑法步骤如下:
(1)用第一次扫描得到的点迹作为航迹根节点,并通过目标可能的速度等建立相关波门,对落入初始相关波门内的第二次扫描点,均建立可能航迹;
(2)对每个可能的航迹进行外推,以外推点为中心,根据航迹外推误差协方差矩阵建立相关波门,波门内与外推点距离最近的第三次扫描点迹作为该航迹关联点迹;
(3)继续步骤2,扫描n次后判断是否形成了稳定航迹,若稳定航迹存在,则继续跟踪。对不满足稳定航迹逻辑的航迹,做删除处理。
判断稳定航迹一般采用m/n逻辑方法,在连续n次扫描中超过m次存在点迹时,便宣告航迹起始成功。
3 系统性能分析
首先利用仿真数据验证通过多雷达点迹融合后系统能否提升目标跟踪精度。以性能相同的两部雷达点迹为例,雷达的脉冲重复间隔为1 010 μs,每一圈发射脉冲2 400个,测距误差为75 m,测量角度误差为0.4,雷达系统的检测概率为0.85,系统采用压缩合并方法进行目标点迹融合,采用JPDA算法进行跟踪。目标以速度[-100,-100] m/s做匀速直线运动,初始位置[63,63] km。图2~图5给出了各雷达以及点迹融合后的一次目标跟踪全程距离、角度、航速和航向的变化情况,全程雷达扫描120圈,每圈约为2.4 s。表1给出了进行1 000次蒙特卡洛仿真得到的各雷达误差统计结果,可以看出该点迹融合系统能够有效提高跟踪精度。

表1 航迹误差统计结果

图2 全程段距离误差

图3 全程段角度误差
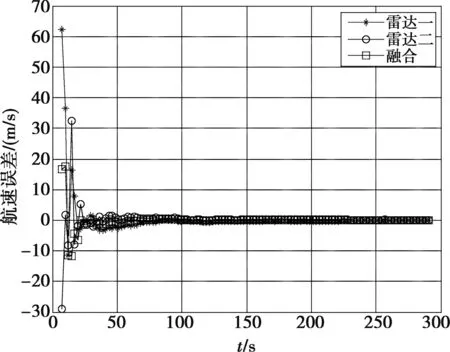
图4 全程段航速误差
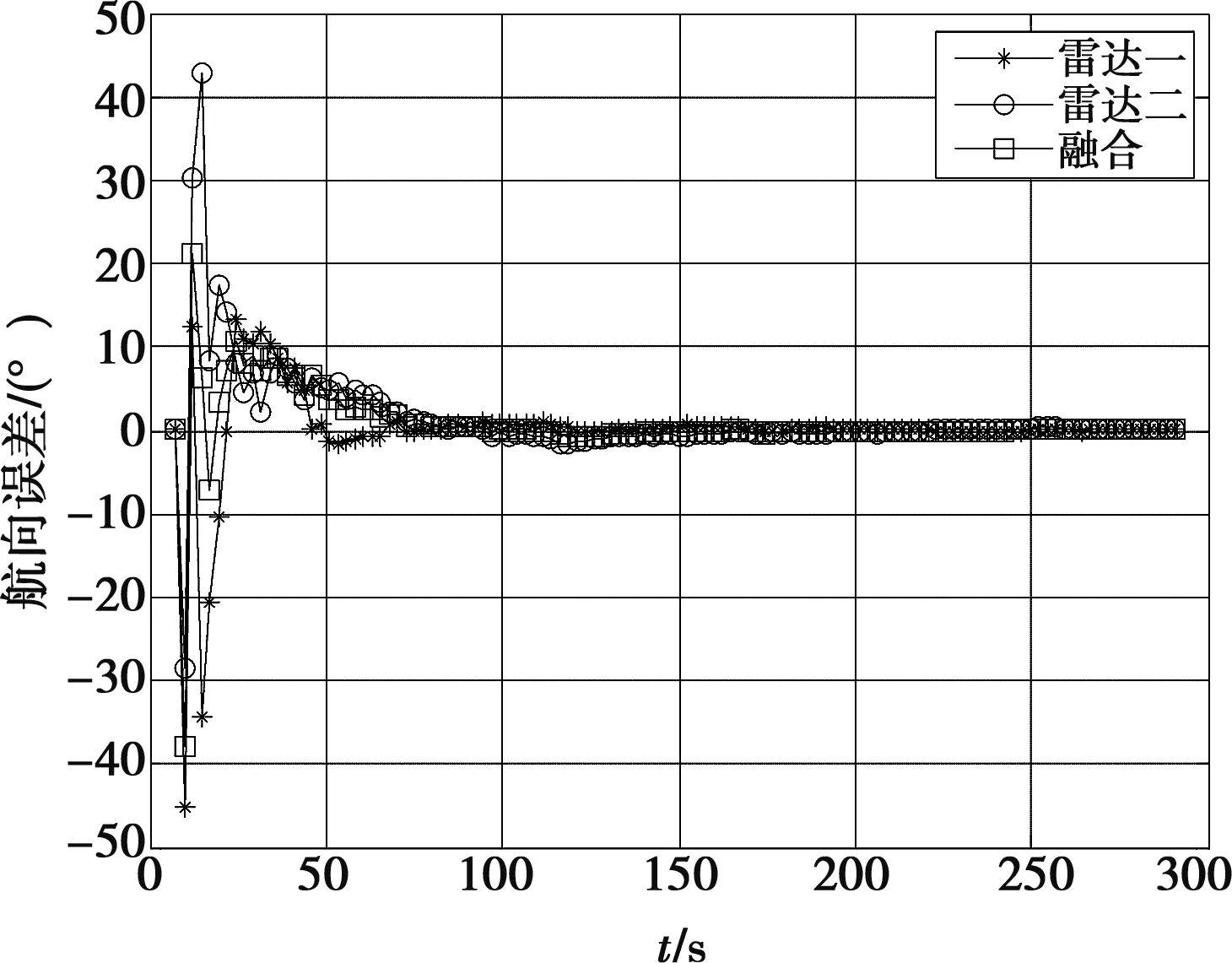
图5 全程段航向误差
多雷达点迹合并压缩通过改善点迹质量提高了目标的跟踪定位精度。通过串行处理后,两部相同的雷达的点迹合成后数据率可以提高一倍,两次目标检测的时间缩短一半,对应的目标机动距离同样会大幅减小,若利用与单部雷达相同的目标跟踪参数,确认航迹起始的时间会缩短一半,并可跟踪到机动性能更大的目标。多雷达点迹串行处理可以加快航迹起始和提高跟踪机动目标的性能。
由于桅杆遮挡等原因,单部雷达可能存在一定范围的盲区。为了解决盲区问题,大型舰艇都装备两部以上的导航雷达。根据本文提出的点迹融合方案,导航雷达采用无目标多普勒速度情况下的处理流程。由于多部导航雷达的采样周期基本相同且采样周期较短,加上导航雷达感兴趣的目标机动性小等,因采样时间差异引入的误差很小,导航雷达通过点迹融合可以提高目标跟踪精度。对导航雷达系统而言,通过只对目标两个以上的点迹合并处理,只要有一部雷达检测到目标,就有目标对应的点迹送入到后续目标检测跟踪处理,融合后的系统与单部雷达相比扩大了观测范围,可检测到位于其中一部雷达盲区内的目标。
当两部雷达的采样周期不同,且雷达和目标之间的相对运动较快时,时间配准过程对融合结果会产生较大的影响。由于外推法只利用了一个点迹位置和多普勒速度信息,外推法进行时间对准所得点迹的误差比较大。相对于多项式插值法,由于使用的信息较少,外推法的误差也较大。为了降低时间配准误差,可考虑航迹确认前采用本文给出的处理流程,采用如下方法在目标航迹输出后计算新点迹时间对准的位置:一是用估计的目标运动参数代替目标多普勒速度,利用外推法进行计算;二是利用属于同一目标航迹上的最近雷达检测到的三个点迹的位置数据,再用多项式插值法进行计算。
4 结束语
本文给出了一种舰载多雷达点迹融合系统的实现方案,并结合双导航雷达点迹融合的具体情况对系统的性能进行了讨论。分析结果表明该多雷达点迹融合处理系统能显著提高目标的跟踪精度,数据融合后的目标跟踪性能优于单部雷达设备的跟踪性能。该融合系统的框架可以支持各雷达单元的独立并行处理,在不影响现有多雷达系统主要架构的情况下完成点迹信息融合,具有在系统改动较小情况下充分利用点迹信息融合大幅提高系统性能的潜力。在加速推进公共计算平台的大背景下,点迹级多雷达数据融合是一种非常可行的工程方案。但是多雷达点迹融合处理目前存在较大的技术难点和一定的技术风险,在后续工作中还需要根据雷达的实际情况和跟踪精度要求,不断优化系统设计和实现,持续提高目标跟踪性能。
猜你喜欢
中国新通信(2023年3期)2023-06-24 03:00:06
中学物理·高中(2021年3期)2021-06-06 07:25:18
青年歌声(2019年12期)2019-12-17 06:32:32
火控雷达技术(2019年1期)2019-04-11 06:35:00
人民黄河(2018年8期)2018-09-10 16:05:55
电子技术与软件工程(2018年9期)2018-02-25 06:21:08
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中国科技博览(2017年31期)2017-09-20 07:56:08
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
大学物理实验(2016年2期)2016-06-20 06:17:30