
内湖封闭水域输水管道水上浮吊施工技术
2021-10-14 02:11:06徐小飞李刘欢
建筑施工 2021年6期
胡 炜 汤 武 徐小飞 李刘欢
上海建工(浙江)水利水电建设有限公司 上海 200082
1 工程概况
大溪水库取水口迁移工程位于江苏省溧阳市,主要施工内容包括在大溪水库内新建至南渡水源厂输水管道2根(DN1 000钢管,壁厚12 mm,单根管道长度1 180 m)、至中心水厂输水管道2根(DN1 400钢管,壁厚16 mm,单根管道长度485 m),并同步建设和改造取水头部。
工程建成后,南渡水源厂的取水规模可达6×104m3/d,中心水厂取水规模可达1×105m3/d,可为溧阳市供水安全提供有效保障。
2 工程难点与特点分析
工程位于大溪水库内,施工区域内水深较大,输水管道主要采用沉管法水上施工。由于本工程地处内陆湖泊水源保护地内,常规浮吊船等大型施工机械无法进入,如何选择水上沉管设备并合理组织管道焊接、运输、沉放全过程,是本工程需要解决的首要问题。
同时,输水管道沉管施工难度大、风险高,如何在无大型施工机械的情况下,保证沉管作业的精度和质量,是本工程面临的一大难题。
3 浮吊装置设计
3.1 沉管方法对比
目前常用的水上沉管方法主要有起重船吊沉法、浮箱吊沉法、扛吊法、骑吊法[1-3](表1)。考虑到本工程地处内陆湖泊的特点,且输水管道管径较小,拟采用浮箱吊沉法组织输水管道水上沉管施工。

表1 沉管方法对比
3.2 装置构成
浮吊装置采用浮箱拼装,利用2只浮箱拼装成龙门架式浮吊装置,每组2只浮箱用钢桁架连成整体,在浮箱龙门架顶上安设2组5 t起吊卷扬机以及配套2组32 t滑轮组,并在浮箱四周安装定位卷扬机连接定位锚。起吊卷扬机配套的吊索采用钢丝绳,钢丝绳型号根据吊装质量计算确定,初步采用5根长10 m的φ44 mm钢丝绳,确保单个浮吊装置起吊承载力在1 000~1 500 kN之间。浮吊装置和现场拼装情况如图1所示。
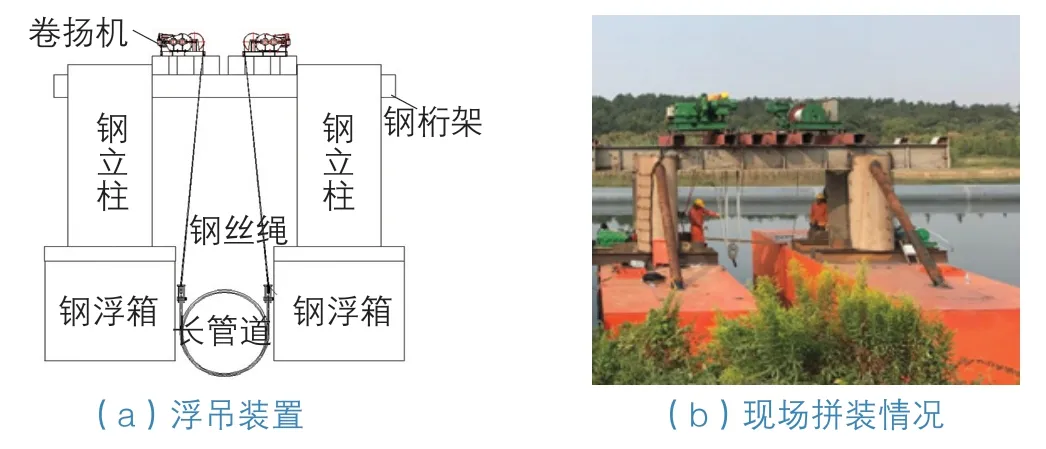
图1 拼装式浮吊装置
4 浮吊法施工方案设计
浮吊法施工流程为:施工准备→水下沟槽开挖、管道陆上拼接→沟槽整平、管道下水浮运→沟槽铺碎石垫层、浮吊就位→沉管下放→回填→混凝土包封→收尾验收。
浮吊法施工主要施工步骤如下:
1)水下沟槽开挖。根据现场施工环境等情况,水下沟槽采用抓斗式挖泥船开挖。在施工放样时,将管线的中轴线、沟槽的边线等分别引测至水面上,采用导标的方法进行控制,导标测量用长5~10 m花杆,施工过程中应用全站仪随时进行复核,保证沟槽开挖平面、高程位置的准确。在沟槽开挖到施工过程中,不间断跟踪测量,以保证沟槽的开挖质量。
2)沟槽整平。沟槽整平采用潜水员配合工作船进行,在工作船上设置漏桶,由人工抛填。根据设计的碎石垫层厚度,即250 mm,确定抛填的碎石量,最后在水面控制测量的基础上,由潜水员水下用刮板找平。
3)管道拼接。将厂家制作好的节长12 m的成品管运到现场,在加工场地坡道上将管道加工、接长到拟安装长度的长管节。自流管钢管接头焊缝采用K形坡口焊,双面焊接。构件表面采用喷射除锈工艺进行基体表面预处理,并采用涂料防腐,选用IPN8710-2B涂料,做法为二底三面。底漆实干后方可涂刷面漆,钢构件表面涂层厚度不小于500 μm,焊缝处涂层厚度不小于400 μm。此外,在管道两端采用盲板封堵,在盲板上分别设进水阀、排气阀。
4)管道浮运。拼装焊接后的管道两端被盲板封闭而浮在水面上,在管道首尾各设置2艘机动船,利用机动船将管道浮运到安装水域。拖航时注意水流速度、风浪对管段的影响,控制浮运管段的曲率半径,尽可能使管段直线浮运。
5)浮吊就位。浮吊装置通过锚机收放锚缆进行移位、定位,定位前根据管道长度计算均匀布置浮吊。管道在机动船牵引下横入浮吊龙门架下,到吊点相应位置后,放下各浮吊船的滑轮钩头穿挂钢丝绳吊索,每根钢丝绳吊索沿管道穿绕一周半,2个钢丝扣用卸扣分别与浮船龙门架两侧的滑车连接。将管段吊离水面1~2 cm,并保证管道首、尾以及中间管段中心精确位于管座中轴线上。
6)沉管下放。管道定位完成后,拆除管道两端封板。在统一指挥下,各浮吊同时缓慢放松钢丝绳、下放管道,使管道两端同时灌入湖水,直至管道灌满水且管道各吊点在同一高程上,然后再缓慢向湖底下放管道。下放过程中各浮吊协同作业,保证下放速度的一致性,并将速度严格控制在15 cm/s,以防管道倾斜移位或者剪断破坏;同时,潜水员在水下对管道中线与基槽轴线的一致性进行动态校正。下放到设计高程后,潜水员下水探摸沉放情况,确定管道稳固且精确沉放于沟槽后再松开撤去钢丝绳。
7)回填。管道沉放符合要求后,对管道进行回填。回填时,先投抛碎石固定管道,再抛块石至500 mm厚度,最后采用开挖土料将管道周边回填至现状湖底高程。为保证回填的密实度,管道两侧同时回填。在回填中,测量人员进行高程测量,并安排潜水员进行水下检测,以保证回填质量。
5 浮吊施工精度控制技术
5.1 水下地形探测技术
本工程沟槽开挖和管道固定、回填均属于水下作业,由于内湖水深较大,施工中水下情况难以确定。虽然安排了潜水员在水下监测和指导施工,但由于水上、水下信息沟通不便,水上的施工作业人员仍难以直观掌握水下情况,施工作业存在一定的盲目性。
为直观获取水下情况,采用配备多波束测深系统的无人船对沉管区域进行水下地形动态测量。多波束测深系统通过换能器以一定的频率向水下发射多个波束,形成扇形声波束探测区;声波在水中传播,遇到水底后发生反射、透射和散射反射回来的回波,经换能器接收,根据声波在水中的传播速度及往返的时间可计算出每个波束对应点的水深值,若干个测量周期组合就形成了水深图。多波束测深原理如图2所示。

图2 多波束测深原理
水下沟槽开挖前,首先采用多波束无人船对沉管区域水下地形进行摸排,复核沟槽沿线的原始湖底高程,精确确定出沿线各处的开挖深度。沟槽初步开挖完成后,再用无人船复测沟槽开挖情况,确定开挖深度是否满足要求。管道回填时,除过程中的高程测量和潜水员水下检测,采用无人船对回填后的管道沿线湖底高程进行复测,确保回填满足设计要求。
5.2 浮吊设备高精度定位技术
要实现管道水上精确浮吊,浮吊设备的高精度定位是关键。本工程位于内湖封闭水域内,从岸边钢管拼装场到水上沉管区域的距离在3 km以内,且沿线无遮挡、透视良好。
考虑到上述特点,采用实时动态载波相位差分(RTK)技术对浮吊设备进行高精度定位[4-5],为浮吊设备配备高精度卫星定位装置,形成流动站,并在岸上钢管拼装场设定位基准站。浮吊流动站通过圆盘天线实时接收卫星发来的定位信息,并通过无线电台接收基准站发来的差分信息。流动站利用差分信息对定位信息进行校正,从而得到高精度的实时定位(图3)。
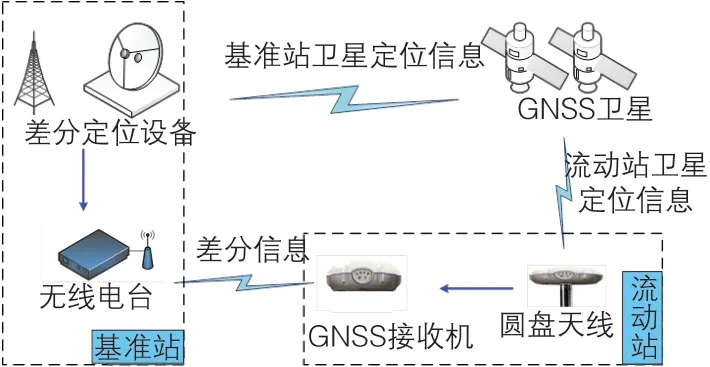
图3 RTK定位系统架构
管道浮吊就位前,首先根据管道质量确定所需的浮吊设备数量,然后根据设计吊沉中心线,按均匀布置的原则确定各浮吊设备的位置,最后在RTK技术的辅助下,各浮吊依次精确就位。通过现场与全站仪设备的对比,浮吊设备的定位精度可达到厘米级,实现了浮吊精确定位。
在无人船多波束测量技术和RTK技术的辅助下,本工程输水管道吊沉顺利完成,且管道一次安装成功率高,施工中未出现由于管道位置和深度偏差带来的返工现象,既提高了施工效率,又为施工质量提供了有效保证。
6 结语
1)针对内湖封闭水域水上沉管施工特点,对比了不同沉管方法的适用性,最终选择浮箱吊沉法进行沉管,并设计了龙门架式浮吊装置。
2)对输水管道水上浮吊法方案进行了设计,确定了包括水下沟槽开挖、管道拼装与浮运、浮吊就位、水上沉放、管道回填等工序在内的浮吊法工艺流程。
3)为提高输水管道浮吊精度,确保管道施工质量,采用配备多波束测深系统的无人船在沟槽开挖前后以及管道回填后对沉管区水下地形进行检测,确保沉管深度满足要求。同时,为浮吊装置配备高精度卫星定位设备,通过RTK技术实现了浮吊装置的精确定位。浮吊施工精度控制技术取得了良好的效果,保证了工程质量和进度。
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:28:30
黑龙江水利科技(2020年8期)2021-01-21 09:27:12
水利科技与经济(2016年7期)2016-04-25 13:03:28
水利科技与经济(2016年3期)2016-04-22 01:04:52
少年文艺·开心阅读作文(2016年3期)2016-03-18 09:41:26
儿童故事画报·智力大王(2015年10期)2016-01-27 17:52:08
文理导航·科普童话(2015年6期)2015-07-29 16:50:19
恋爱婚姻家庭·养生版(2015年12期)2015-05-14 17:38:28
水利建设与管理(2015年10期)2015-05-09 08:29:47
海军医学杂志(2015年2期)2015-02-27 13:47:42
