一种二自由度并联机器人
2021-10-14 02:15:48李猷凤
武汉船舶职业技术学院学报 2021年3期
李猷凤
(武汉船舶职业技术学院,湖北武汉 430050)
并联机器人,从结构上来说,它通过两个或两个以上的独立分支,每个分支可以独立运动,通过一定的形式组合起来,并且具有两个或多个自由度,从而驱动某个装置实现特定运动的一种闭环机构。很多并联机器人由于其在空间上高度的对称性,在实现某个运动的过程中,有很多特点。比如它可以实现高精度的位置控制。由于其结构紧凑、体积小,又具有重量小、响应快、刚度高、承载能力大等特点,并且可以使动平台在很小的空间范围内工作。正是由于其具有这么多的特点,因此,并联机器人的应用十分广泛。
平移并联机器人可分为平面结构和空间结构。平面结构的二自由度平移并联机器人通常采用四杆铰链的形式进行连接组合,平面结构简单,适用于对精度要求不高、承重要求低的场合。空间结构的二自由度平移并联机器人克服了该缺点,它能在很大程度上改善平面结构在垂直于运动平面的刚度,使得机构的承重能力得到提高。
因此,本文研究对象为一种空间结构类的二自由度平移并联机器人。
1 二自由度平移并联机器人的模型分析
本文设计一种二自由度平移运动并联机构。该机构通过电机带动滚珠丝杠转动,安装在滚珠丝杠副上面的滑块在丝杠的驱动下,在导轨上做平行移动,驱动连杆进行往复摆动,从而使得运动平台可以在一定的空间范围内平移。
为完成此功能,将该二自由度平移并联机器人等效成平面机构,如图1所示。

图1 等效平面机构简图

满足上述关系式的模型有如图2所示的四种。可以看出第三种、第四种模型两侧的连杆在一些情况下可以运动到平行的状态,在滑块移动过程中,容易出现动平台偏向一侧的情况,使机构失去平衡,无法承重或难以获得稳定的输出。因此排除第三、四种模型。对于第一种和第二种模型,对比可知,第一种模型动平台的移动范围较为灵活,易于控制其位置。并且该模型呈上窄下宽的梯形结构,承重较好。动平台尺寸较小,可以使承重集中,稳定性与模型二相比可以得到保证。在要求动平台能够按照要求的轨迹或要求的空间位置稳定可靠运动的情况下,结合各个组成部分的装配关系,可知该并联机器人只能选择第一种模型。
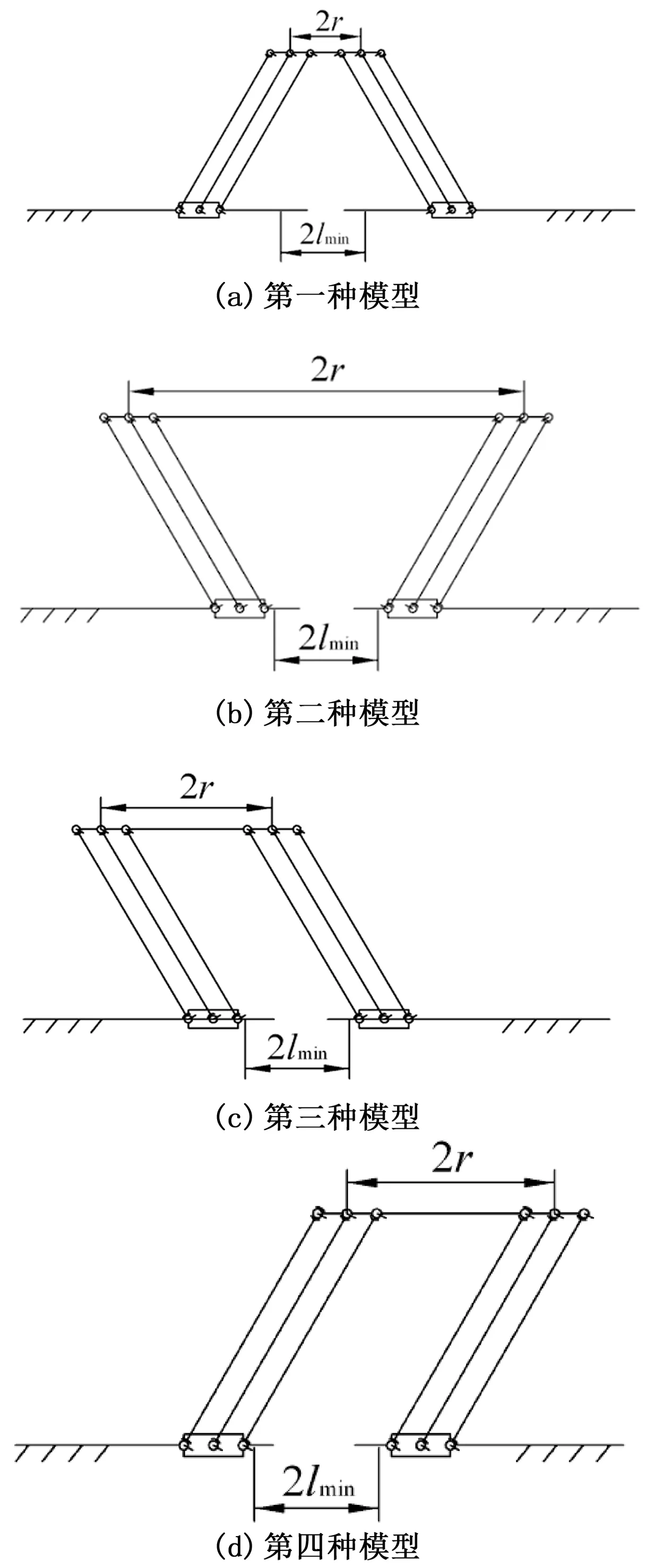
图2 机构的模型
2 二自由度并联机器人的工作空间分析
机器人的工作空间分析包括运动空间位置分析和结构参数设计。
2.1 运动空间位置分析
由于左右两侧的连杆尺寸相同,在连杆摆动过程中,动平台的位置和运动一直处于平移的状态。对于该机构,所构成的二自由度并联机器人为平移机器人,动平台的工作空间可以分解为左侧连杆的运动区域与右侧连杆的运动区域,即两个区域的公共部分。要求该二自由度并联机器人能够按预先规定的轨迹,达到200mm×300mm的工作空间。如图3所示,两侧连杆分别做摆动,因此,根据摆动的最大值和最小值,画出圆弧,可得到阴影部分的共同区域,该区域即为动平台所能达到的区域。
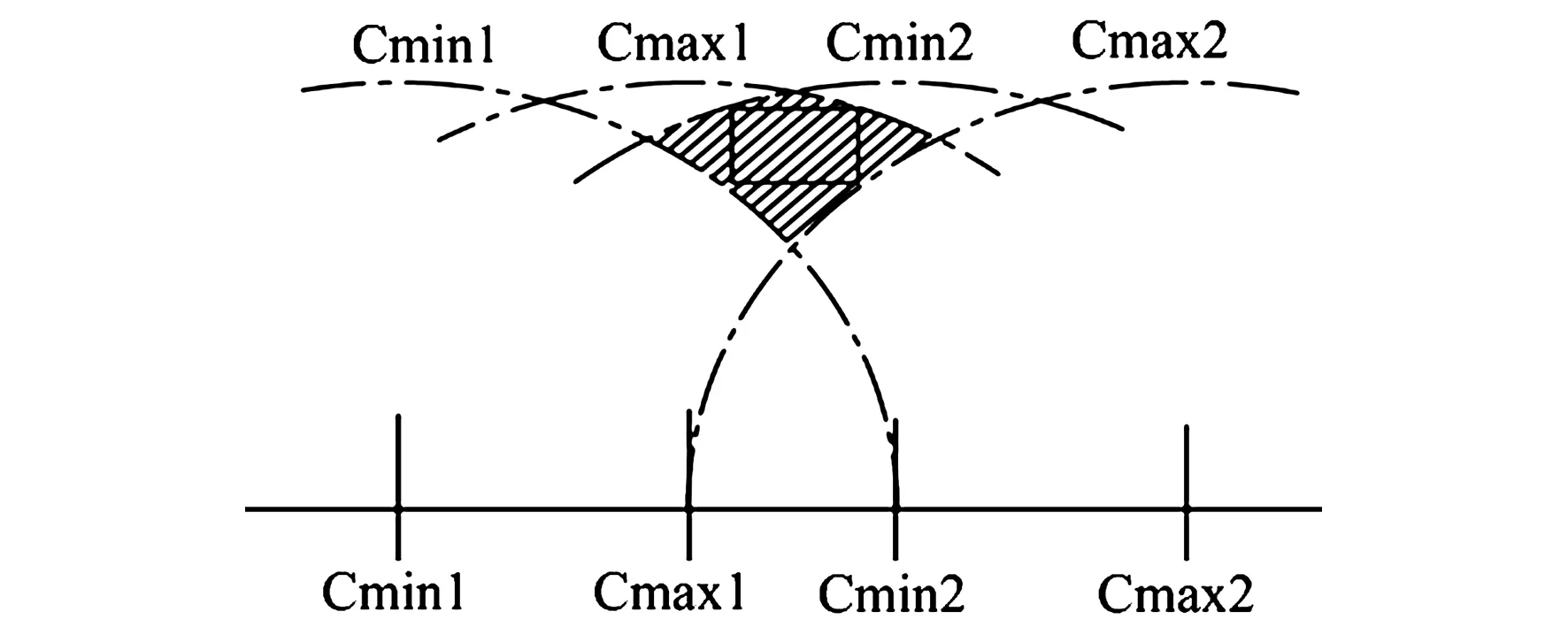
图3 机构的理论工作空间
图4为工作空间的分析示意图,虚线表示初始位置,即机构所能达到的最右端最低点位置,右边粗实线表示初始位置到垂直方向能够达到的300mm的工作空间,再向左平移200mm的位置表示机构在垂直方向达到300mm的同时水平方向能够达到的200mm区域,我们将滑块最大极限位置处连杆与基座方向之间的角度设为45°。左边细实线表示机构能达到的最左端最低点位置。设由此机构能够达到200mm×300mm的工作空间。
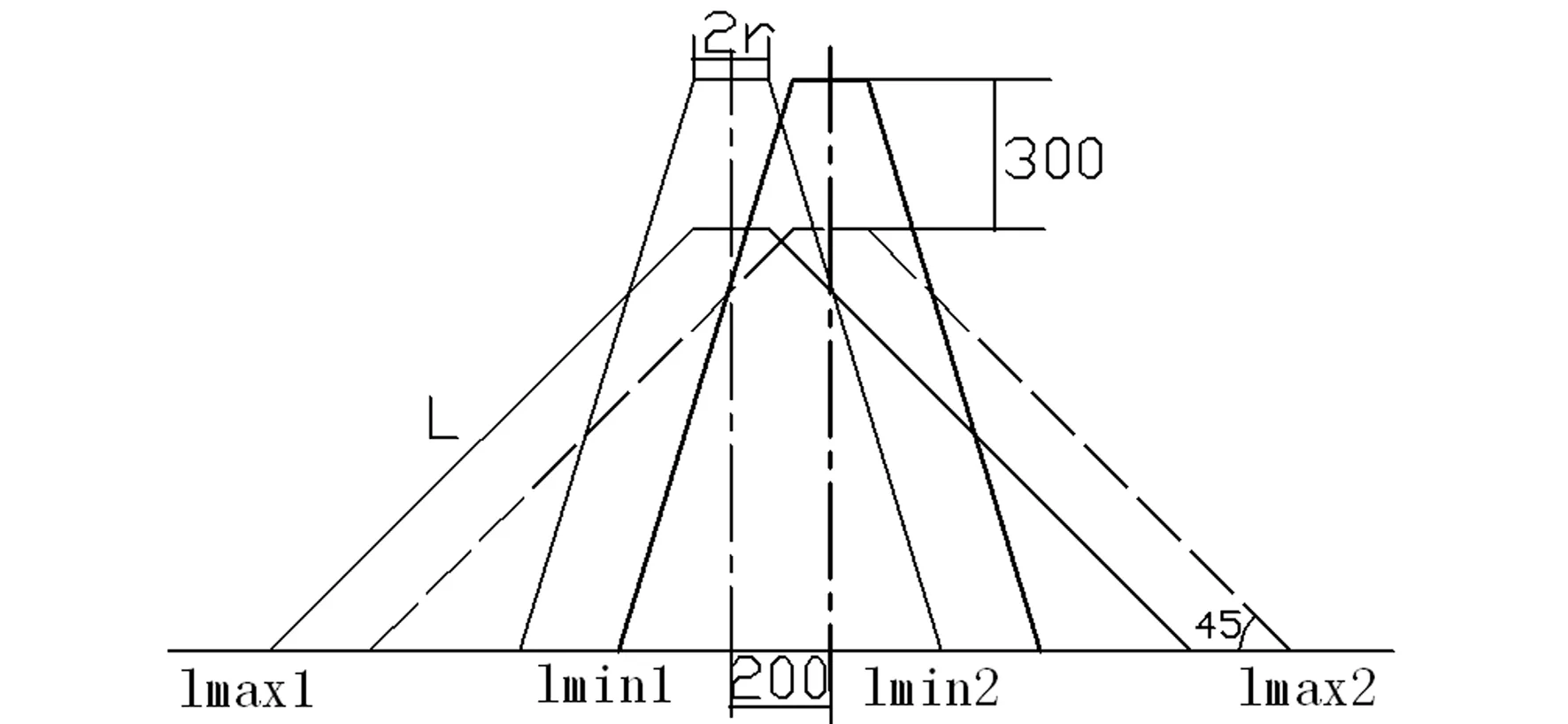
图4 机器人的工作空间分析
2.2 结构参数设计
(2)验算可知满足奇异条件,且能够达到200mm×300mm的工作空间。
参数如表1所示。

表1 机构的参数设定值
3 二自由度并联机器人的结构设计与选型
通过对机器人的空间位置分析,结合机器人的组成,可以对其进行零部件设计与选型。
3.1 电机选型
由于加载而产生的转矩
上式中Fa0取最大轴向力, Ph0为导程,kp为参数取0.18,得到转矩为0.34Nm,又由于加速度负载等因素产生其他惯性,所以转矩≥0.4Nm。
选型号为SM 80-033-30LFB电机,电机参数如表2。

表2 SM 80-033-30LFB型电机参数
3.2 滚珠丝杠的计算与选型
(1)选取的丝杠系统为:
磨制丝杠(采用右旋)、轴承到螺母之间的距离ln= 1200mm,寿命lh= 24000工作小时,μ= 0.1 (摩擦系数),fw=1.4,最大行程l1=700mm,工作台最高移动速度vmax=20(m/min),丝杠副最大相对转速nmax=3000(r/min),定位精度为25μm/300。丝杠运动参数见表3。

表3 丝杠运动参数
(2)丝杠副的选型
丝杠副选用G4010-4。
丝杠副与滚珠丝杠相配套,滚珠丝杠的转动带动丝杠副转动,丝杠副与螺母副固结在一起,带动滑块平移。
丝杠副参数如表4。

表4 丝杠副参数
(3)滚珠丝杠副的安装方式
滚珠丝杠副安装方式有很多,主要包括以下几种:固定-自由、固定-支撑、支撑-支撑、固定-固定。根据使用场所和受力方式、结构形式、丝杠长度等的不同,采用不同的安装方式。由于丝杠长度较长,本机构中为防止丝杠抖动变形过大,从而影响动平台运动精度,丝杠副宜采用固定-自由安装方式。
3.3 联轴器的选型
联轴器用于连接电机和丝杠。丝杠的最大扭矩最大为0.4Nm,联轴器的计算扭矩Tca=KAT,取KA=1.3,则
Tca=1.3×0.4=0.52Nm
连接部分的直径为35mm,经查手册,宜选用LD2型梅花形弹性联轴器,参数如表5。

表5 联轴器相关参数
3.4 滚动轴承的选型
丝杠两端用滚动轴承连接,此处选取深沟球轴承(GB/T 276-1994),查表知,其内径为35mm,代号为:6307,参数如表6所示。

表6 深沟球轴承结构参数
3.5 滚珠丝杠固定结构的设计
滚珠丝杠总长为1260mm,属于长杆类零件,设计上为了防止由于热胀冷缩对丝杠的影响,一般采用一端固定和一端游隙的方式进行固定。丝杠的一端固定的方式采用圆螺母和止动垫圈固定,利用隔圈压紧滚动轴承内圈和丝杠,丝杠上需要开一个键槽,用来装配止动垫圈,这种固定方式可靠性高,利于用在复杂工作环境中;丝杠另一端游隙主要是采用预留了丝杠与滚动轴承之间间隙的方式,设计预留尺寸必须大于理论丝杠工作环境下热胀冷缩理论差值。
3.6 导轨的设计
根据该机构的运动机理,滑块在丝杠的转动下,由丝杠副驱动其沿着导轨在水平方向左右移动。每一个滑块连接两个导轨,整个装置需4个导轨。导轨型号为SSR35×W,该导轨结构简单,制造方便。用灰铸铁材料制造导轨。由装配关系可知,其长度要稍大于滚珠丝杠的总长度,根据丝杠长度1260mm,此处取导轨长度为1300mm。
3.7 基座的设计
基座是用于固定导轨的,与导轨相对应的位置有很多螺纹孔,用于与导轨相连接。长度与导轨长度相等,基座的两边突台中,选择一边的突台制作一个突出的小台阶,用以调整导轨与基座配合时所产生的误差。外形尺寸如图5所示。
图5 基座的结构尺寸
3.8 滑块的设计
滑块在机构当中的作用为连接丝杠副,导轨和连杆,从而带动上面的动平台运动,并能自如地在导轨上滑动,如图6所示。滑块下端连接两个水平并排导轨,上端连接三根连杆,中间连接丝杠副使丝杠副能在其中转动但不能脱离滑块。两端各一个滑块,总共需要两个滑块,滑块外形尺寸由导轨外形尺寸决定。
图6 滑块的结构图
3.9 连杆的确定
连杆长度取d=20mm,满足要求。

4 总体装配图
该二自由度并联机器人由以下几部分组合而成,实现动平台的平移运动:导轨上安装有1根滚珠丝杠,丝杠在电机的驱动下,带动安装在丝杠及导轨之上的两个滑块在导轨上滑动,每个滑块通过上面的三个铰链连接到三根连杆,三根连杆长度相等,且在空间上相互平行,连杆的上端同样通过铰链与动平台连接,组成完整的机构。根据前面设计的各个组成部分,将各部分进行组装,得到二自由度平移并联机器人的总体装配图,如图7所示。
图7 二自由度平移并联机器人装配图
5 结 语
本文对二自由度平移并联机器人工作空间进行了分析,结合工作要求和承重能力,并根据机器人运动特性对机器人结构参数和部件进行了设计选型,得到了如下结论:
根据该机器人的工作空间为200mm×300mm,设计出机器人连杆长度1230 mm,选定导轨型号为SSR35×W,滑块由导轨尺寸而定。带动丝杠运动的电动机选取型号为SM 80-033-30LFB的伺服电机,丝杠选G4010-SR-1260×900-4型滚珠丝杠。与丝杠配套的轴承选择6307型深沟球轴承,丝杠联轴器的型号为LD2的梅花形弹性联轴器。其余零部件根据定位和固定方式选取或者根据构建尺寸及受载情况自行设计。经过校验与验算分析,该机器人在运动中没有干涉,在力学方面合格且能够满足工作空间要求。
猜你喜欢
装备制造技术(2020年2期)2020-12-14 03:09:26
制造技术与机床(2019年11期)2019-12-04 05:50:26
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
机械工程师(2015年9期)2015-02-26 08:38:12
机械工程师(2015年10期)2015-02-02 01:14:36
机械制造与自动化(2014年1期)2014-03-01 04:21:45
机械与电子(2014年3期)2014-02-28 02:07:57
汽车与新动力(2012年5期)2012-03-25 10:09:45