三维激光扫描技术在露天矿山监测中的应用
2021-10-12 08:24:34魏占胜王涛鲍文福
采矿技术 2021年5期
魏占胜,王涛,鲍文福
(新疆紫金锌业有限公司,新疆 乌恰县 845450)
0 引言
在露天矿山中,采场的测量与验收工作往往需要测量人员通过人工、手持的方法进行数据采集,此项工作属于静态测量,不仅工作量较大、误差较大,而且存在一定的安全风险。传统上多采用传感器监测法,但该方式只能反映出几个单点的变形情况,不能直观地给出监测点间、面内、体内的变形。
三维激光扫描技术系统又称“实景复制技术”,是测绘领域继GPS技术之后的又一次技术革命[1],测量人员可以在较安全的区域完成动态的数据采集工作,无需反射棱镜,对扫描目标物体不需进行任何表面处理,快速、可靠地采集物体表面的三维数据。相对于传统的单点测量,三维激光扫描技术实现了面测量的技术突破,且其具有便携、采集速度快、非接触式、自动化程度高等特点,可用于解决危险目标、环境(或柔性目标)及人员难以企及的情况,因而近年来广泛应用于地形地质测绘、矿山测绘、矿山三维模型重构等领域。
1 Maptek R3系列三维激光扫描系统
1.1 系统组成
南澳Maptek公司的R3系列三维激光扫描系统包含三维激光扫描仪、三脚架、井下光源、溜井测量装置及相关软件,如 Point Studio,Sentry、PerfectDig等,并配套影像数据采集系统、空间数据测量系统、岩土工程分析系统、边坡变形监测系统等。
其中,三维激光扫描仪由激光头、内置罗盘、内置GPS、内置锂电池、高清相机、光学望远镜、单把手、旋转轴、双把手所构成如图 1所示。PointStudio软件是用于处理扫描仪的建模、分析和报告等大型点云数据的3D平台桌面工具,具备体积计算、自动提取坡顶底线、等高线自动提取、剖面线提供、填挖方量计算、岩土工程分析等功能。Sentry软件专门用于针对边坡变形的监测软件,具备自动处理采集的点云数据、绘制变形位移曲线、绘制变形速度曲线、绘制气象信息曲线的功能。PerfectDig软件专门用于施工结果与设计方案的对比检验与快速质量评估。

图1 三维激光扫描仪
1.2 系统工作原理
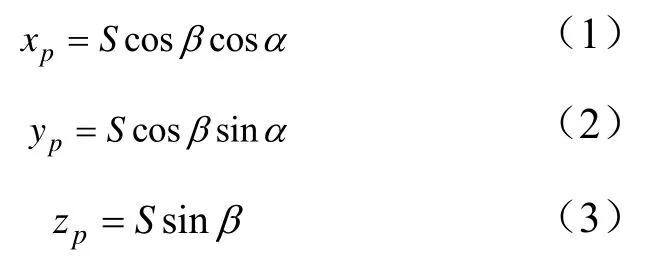
扫描仪采用脉冲式激光、运用激光测距原理进行工作[2],如图2所示,由激光发射器(图2中原点)发出激光脉冲信号,经目标区域(P点)的表面漫反射后,沿相同的路径反射传回到接收器,便可直接返回P点至原点的距离S,再通过控制编码器同步测取P点的横向扫描角度观测值α和纵向扫描角度观测值β,基于以上数据,利用式(1)~式(3)即可计算P点的相对坐标xp、yp和zp,利用反射原理可得到P点的反射率。

图2 三维激光扫描仪工作原理
1.3 系统优势
与其他测量系统相比较,Maptek R3系列三维激光扫描系统具有准确高效性、独立性、强固性、可调节性、兼容性、数图同步性以及主动性的优势。
(1)准确高效性。本系统可以大范围、高分辨率、高精度地采集目标物体的坐标。不同于传统激光扫描仪的标靶拼接,可通过后视定向技术进行点位快速匹配,并能以1200万点/min的点速率进行扫描,这大大缩短了外业工作时间,简化了内业数据处理工作流程。
(2)独立性。本系统体积小、重量轻、便于携带;其自身可完成三维点云-面-体的全过程;系统的点密度极高,同时PointStudio软件也具备自动拼接、后台交会功能,因而设备无须全站仪全程配合。
(3)强固性。本系统结构紧凑,符合IP65防护等级,即可完全防止粉尘进入,不受任何角度低压喷射的影响,可适应-40~+50℃的温度。
(4)可调节性。适应三脚架、延伸杆、车载、机载多种环境的测量;且可在获取点云数据的同时直接浏览测量结果,外业中可任意定义扫描区域及点云密度。
(5)兼容性。本系统PointStudio等处理软件的数据成果可与 Surpac等第三方矿业软件无缝对接;扫描仪上配备全站仪棱镜或RTK接口[4],可与传统仪器进行坐标数据的快速转换。
(6)数图同步性。本系统内置工业级线性数码相机,像素达到1.47亿,影像数据与点云数据同步采集,帮助测量人员在现场进行综合判断、在内业时编录矿岩边界和节理裂隙。
(7)主动性。本系统采用主动发射扫描激光的方式进行工作,扫描过程不受扫描环境的时间、空间约束。
4月26日,天成控股发布2016年度报告,因连续两年经审计的净利润亏损,天成控股实施股票退市风险警示,股票被交易所特别处理,戴上“ST”的帽子,停牌一天,此后,日最高涨跌幅变更为±5%。
2 工程应用实例
2.1 工程背景
随着国家和矿山企业对矿山安全的日益重视,越来越多的矿山向数字化的方向发展[5],数字化逐步渗透到矿山的每个部分与每个环节中。为顺应矿山的数字化大趋势,某金属矿山露天开采中要完成采场的测量、采掘方量的结算与验收、边坡的稳定性分析、排土场及尾矿库的位移沉降监测,并建立以上各区域的数字化模型。以上技术目标可为矿山的开采方案、维修计划、事故预防措施的制定提供参考。
2.2 准备工作
在开始现场扫描之前,需要进行测前准备。将采场通讯基站的网络引入Maptek R3系列三维激光扫描系统(以下简称“扫描系统”)所在的位置,连接扫描系统的各个通讯接口,连接扫描系统的控制系统与操作软件。在目标区域布设控制点,在测量位置布设测站,采用控制测量的方式连接各测站及其数据,相邻测站间要保留适当的重叠部分。在某测站采用架站式架设扫描仪并进行定向,由于扫描仪自身具备固定的坐标系统,因此,只需对1~2个标靶进行精确扫描,再通过操作软件控制扫描仪的内置罗盘与 GPS进行坐标定位,即可完成定向工作。
2.3 露天监测应用
2.3.1 采掘方量的结算与验收测量
在各测站对露天采场进行三维激光扫描,通过遥测系统将扫描结果传输至处理中心。在处理中心利用 PointStudio软件读取全部数据,选择拼接方法,对各测站的数据进行配准,得到绝对坐标下的点云数据,PointStudio软件内置多种拼接方法,可确保配准具有较高的准确率。然后,使用软件的范围过滤和抽稀功能,对不同测站数据的重叠区域进行过滤[6]。对采集的点云数据通过扫描三角网进行建模,生成露天采场三维模型,图 3(a)、(b)分别为10月份、12月份的露天采场模型。最后,对比两期数据模型,得到两期测量间发生变化的区域,如图3(c)所示;运用PointStudio软件的体积计算功能,计算两期间的采掘方量。

图3 露天采场三维模型
2.3.2 地形测量
利用扫描系统获取1:500的比例尺下地形的有效点云数据,与实际地形进行对比,如图4所示,可以看出,点云数据可较准确地描述地形特征。

图4 露天采场的地形点云数据与实际地形的对比
2.3.3 采场边坡的岩土工程分析
利用扫描系统获取采场边坡的点云数据[7](如图 5(a)所示),计算目标区域的反射率和纹理信息,再运用岩土工程分析系统对采场边坡所揭露出的节理构造进行统计分析,找出弱势结构面,如图5(b)所示。

图5 目标区域的节理构造分析
2.3.4 排土场的边坡稳定性监测预警
坡脚是排土场的根基,其长时间支撑着整个排土场,是确保排土场稳定的前提条件和重要因素,此外,本露天矿排土场的坡脚正逐渐地被雨水冲刷和侵蚀,已形成半个深沟,因此,排土场的全天候监测预警区域最终选择在腰部与坡脚之间的制高点,监测水平为 1370~1670 m,监测角度为水平120°~垂直90°,监测区域如图6所示。
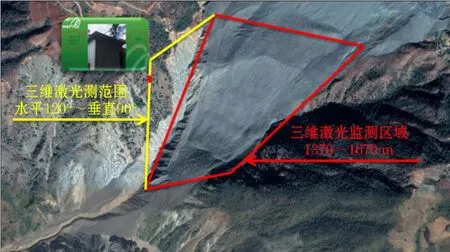
图6 排土场的边坡稳定性监测预警区域
在监测站点埋设固定监测墩,定期将扫描仪安装在监测墩上,尽量在单次内进行较长时间的持续扫描,并在扫描系统至矿山中控室间布设无线基站与电力网络,通过无线基站连接扫描系统与Sentry软件。之后,在Sentry软件中定义多个全天候稳定性监测预警初目标区域。然后,根据扫描仪定期采集的数据,软件会自动绘制变形位移及速度曲线,生成三维变形位移云图[7],分别如图 7(a)、图 7(b)所示。

图7 排土场的边坡稳定性监测结果
若计划监测时间的天气条件较为恶劣,须提前为扫描仪修建2 m×2 m×2 m的观测房用以代替监测墩。房内附有长2 m,高1 m,下沿高于地面1 m的前窗,调整扫描仪的位置以使激光头正对前窗,在房内安装避雷针、等电位连接排、接地装置,形成防雷系统;并在房顶设置气象站,可直观地获悉现场的气象信息。
2.3.5 排土场的边坡治理施工监测
连接扫描系统与 PerfectDig软件,通过PerfectDig软件控制扫描仪即时采集施工现场的场景三维数据,软件自动对其进行拼接、植被剔除等;然后,圈定待评估区域,并将现场数据与设计方案进行对比、查询和分析,其中包括横截面、块体轮廓线截取、施工与设计偏差、超挖量、欠挖量(如图 8所示)、挖方偏差范围尺寸等的查询;之后,PerfectDig软件自动生成施工与设计一致性检验的成果报告,根据报告内容,对施工结果不断进行修正调整,从而控制与设计之间的偏差。

图8 超挖量、欠挖量分析
3 结论
(1)三维激光扫描技术适用于测量人员无法到达的复杂矿山现场和空间,能够用可视化的方式表示目标区域的具体形态和空间分布,具有准确高效性、独立性、强固性、可调节性、兼容性、数图同步性及主动性的优势。
(2)将三维激光扫描技术同时应用于矿山中,可实现对地上、地下构筑物的全方位监测与管理,还可根据点云数据再现矿山开采过程,辅助测量人员实时掌握各区域的开采进度、开采程度以及变形情况,提高了矿山技术管理水平,为矿山测量的验收提供数据基础,为矿山的安全生产提供了保障。为边坡稳定性的分析、现场的治理提供了依据,促进了矿山安全监测的精细化管理。
猜你喜欢
采矿技术(2022年5期)2022-09-29 04:01:06
采矿技术(2021年5期)2021-10-12 08:24:22
世界有色金属(2020年21期)2020-12-08 12:41:33
中国设备工程(2019年17期)2019-09-24 09:25:14
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
新疆钢铁(2015年3期)2015-11-08 01:59:50
现代营销·经营版(2015年3期)2015-04-20 06:46:58
有色金属设计(2015年2期)2015-02-28 21:09:00
中国工程咨询(2015年4期)2015-02-14 03:49:58
现代营销·经营版(2013年5期)2013-05-14 14:55:04