
双充种室大蒜单粒取种装置设计与试验
2021-10-12 10:52:36侯加林刘全程李天华李玉华耿爱军
农业工程学报 2021年14期
侯加林,刘全程,李天华,李玉华,娄 伟,耿爱军※
(1.山东农业大学机械与电子工程学院,泰安 271018;2.山东省农业装备智能化工程实验室,泰安 271018;3.山东省园艺机械与装备重点实验室,泰安 271018)
0 引 言
大蒜是中国的重要经济作物,其种植面积、产量及外贸出口量均居世界首位[1-2]。大蒜机械化播种具有省工、高效、保农时的优点[3-6],但是现有的播种机械工作时易出现漏播现象。机械化播种作为大蒜全程机械化生产的重要环节,开展基于大蒜“一穴一粒”种植农艺要求[7]的单粒取种技术研究,是当前大蒜播种机械化发展的重要方向。
栗晓宇等[8-9]提出利用蒜种盒来播种大蒜,需人工将蒜种置于种盒,自动化程度低;李瑞川等[10]研制的WZ-4型大蒜种植机与孙雪[11]设计的大蒜播种机采用扇形转筒实现单粒取种;梁开星[12]设计了一种气吸式单粒取种装置,并发现取种吸盘无法较好适应蒜种复杂外形特征是造成蒜种漏取的主要原因。侯加林等[13]采用“取多留一”的设计原则,研制了爪式循环单粒取种装置,取种爪容种空间的缩小能将多余蒜种清离只保留一粒蒜种,易造成伤种。李玉华等[14]提出了轮勺式单粒排种装置,取种勺与异形面结构的取种轮构成容种空腔,漏充率较高。目前,勺链式取种的方式在大蒜播种机应用最广泛[15],在其他大籽粒种子播种机中也有广泛应用[16-18]。但是通过取种勺从大蒜种群中主动提取一粒蒜种,具有一定盲目性,且易产生漏充、重种,需要从研究种群运动规律和改进取种方式方面入手,使取种勺取种具有目标性,从而提高充种性能。近年离散单元法作为仿真颗粒物料运动和机械特征可靠的数值技术[19-20],已经在农业工程领域等获得广泛应用[21-27]。
本研究设计了双充种室大蒜单粒取种装置,并进行理论分析,确定关键部件参数,阐明双充种室结构提高取种单粒合格率,降低蒜种漏充的机理。利用EDEM软件进行仿真试验,分析种群运动规律及不同参数对充种性能的影响,得到第二充种室内充入蒜种与被清掉蒜种的速度变化关系,采用 Box-Behnken中心组合试验[28]得出最优参数组合,并进行验证试验。
1 整机结构与工作原理
双充种室大蒜单粒取种装置主要由第一充种室、传动轴、传动链、链轮、取种勺、护种板、第二充种室、导种口等部件组成,如图1a所示。传动链两端分别设有链轮,由传动轴输出动力。工作过程主要分为一次充种,运移,投种,二次充种,重力清种和排种 6个串联作业阶段,如图1b所示。
作业时,传动链带动一级取种勺从第一充种室内舀取蒜种,蒜种在自身重力、周围蒜种群作用力及取种勺作用力的共同作用下充入一级取种勺,一级取种勺舀取蒜种运移至顶端翻越链轮,离心力作用下蒜种被抛送进入第二充种室,二级取种勺舀取蒜种,通过协调一、二级取种勺速度,保证第二充种室内蒜种的数量不少于 1粒,若蒜种数量超过1粒,则1粒蒜种在第二充种室的取种勺内,其余蒜种叠放于二级取种勺内蒜种的上侧,呈现上下层叠有序摆放姿态,二级取种勺带动蒜种运移出第二充种室,上层多余蒜种平衡状态被打破,在重力作用下回落到蒜种箱,完成清种,二级取种勺经导种口处完成蒜种单粒投放。
2 关键部件设计
2.1 取种勺
取种勺的结构参数主要取决于蒜种尺寸及充种后蒜种的附着姿态,蒜种在取种勺内的附着姿态可以为平躺、侧卧、站立3种姿态,如图2所示。
研究表明[29],蒜种稳定充入取种勺的姿态分布概率与其附着姿态的水平截面积成正相关,且概率总和为 1。平躺、站立姿态下的投影截面近似为椭圆形和扇形,满足如下关系:
式中S1为蒜种平躺姿态下水平截面积,mm2;S2为蒜种侧卧姿态下水平截面积,mm2;S3为蒜种站立姿态下水平截面积,mm2;下标0表示各尺寸的平均值。
选取山东省内种植范围较广且尺寸等级不同的 3类供试大蒜品种(金乡、苍山、白桥大蒜),人工清选后,对每个品种随机抽取 500粒大蒜测量。利用三丰573-181-20型数显游标卡尺(量程100 mm,精度0.02 mm)测量供试蒜种的长度l,宽度w,厚度t并计算平均值,得到 3种供试大蒜平均长度l0分别为 32.48、34.26和33.83 mm,平均宽度w0分别为18.94、18.68和20.26 mm,平均厚度t0分别为21.08、20.34和21.45 mm,选择厚度尺寸作为分级依据[30],将供试大蒜分为 3个等级,其中Ⅱ级大蒜的占比最高,分别达到60.2%、75.2%和68.4%,具体结果如表1所示。

表1 蒜种尺寸区间Table 1 Overall dimension of garlic seeds
以金乡大蒜为例,结合式(1)计算得平躺姿态下水平截面积最大,并根据最小势能原理[4,6],将平躺姿态作为主要尺寸的设计依据,为保证取种勺能容纳 1粒平躺姿态的蒜种,取种勺开口长径D1应大于蒜种平均长度l0,为避免 2粒站立姿态的蒜种同时充入取种勺,取种勺开口长径D1应小于2粒蒜种的平均宽度w0之和;为保证蒜种重心在取种勺内,取种勺深度H应大于蒜种平均厚度t0的一半,小于平均长度l0的一半,参照经验公式[29]取种勺结构尺寸参数应满足:
式中k1为取种勺开口长径调节系数,取 1~1.3;k2为取种勺开口短径调节系数,取1.1~1.3;k3为深度调节系数,取 0.5~0.6;根据式(2)确定取种勺开口长径、开口短径和深度分别为35、22和12 mm。
取种勺分布采用传动链与一、二级取种勺前后串联排列的布置方式,如图1b所示。参考国内外相关机型传动链倾角一般设置60°~90°,本文为减小取种装置空间结构和便于蒜种投放,预试验后确定第一充种区内传动链倾角为 70°,第二充种室内传动链倾角为 65°。理想状态下,单位时间内第二充种室内传动链取种勺转过的数量等于所投蒜种的数量,即:
式中v0为播种机前进速度,m/s;v2为第二充种室内传动链线速度,m/s;l为第二充种室传动链取种勺间距,mm;L为蒜种种植间距,mm;山东地区大蒜种植间距L为80~110 mm,播种机前进速度v0为0.06~0.14 m/s[13,15],根据《农业机械设计手册》[31]选用滚子链(链号 12A,节距19.05 mm),取种勺安装于传动链上,取种勺间距为 8个链节(152.4 mm),将上述参数带入式(3),计算二级传动链线速度,得到二级取种勺速度为0.08~0.25 m/s。
2.2 第一充种室
第一充种室具体结构包括种箱(45#钢)、取种勺(树脂)、T型连接链板、分流板、链轮等部件,如图3a所示。T型连接链板用于固定连接一级传动链和取种勺,结合取种勺尺寸确定凸出板节的长度为7 mm,宽度为5 mm。分流板位于两行传动链之间固定安装在隔板上,长度为120 mm。
一级取种勺经链轮Ⅰ进入种箱后舀取蒜种,以充入一级取种勺单粒蒜种为研究对象,以蒜种质心为原点,建立坐标系,x方向与惯性离心力同向,y方向垂直于惯性离心力,如图3b所示,蒜种的受力满足如下关系:
惯性离心力和蒜种与取种勺摩擦力满足如下关系:
式中μ为蒜种与取种勺摩擦系数,通过试验测定μ=0.46。
惯性离心力与支持力夹角的余角满足如下关系:
结合式(4)~式(6)计算得如下关系:
由式(7)可知,一级传动链线速度与种群横向合压力、纵向合压力有关。种群横向合压力和纵向合压力与种层厚度及流动特性有关;当蒜种的充种位置α一定时,种群横向合压力和纵向合压力增加,线速度随之增大。
取种勺携带蒜种翻越链轮进入投种区,如图3c所示,蒜种与一级取种勺间保持相对平衡且不被甩离的临界条件应满足如下关系:
由于第一充种室结构一定,参考链轮标准选择链轮半径为40 mm,种勺旋转角为30°~100°,结合式(5)求解一级取种勺翻越链轮Ⅱ最大临界速度为0.76 m/s,取种勺速度过快不宜充种[13-17],参照取种勺布置方式和二级取种勺的速度范围,保证第二充种室内蒜种的数量不少于1粒,确定一级取种勺间距为二级取种勺间距的一半,其间距为4个链节(76.2 mm),一级传动链线速度即一级取种勺速度为0.08~0.25 m/s。
根据农业物料学理论,以种箱底部和侧壁相交处为起始点,蒜种休止角斜边延长线与种箱侧壁的接触点到种箱底部的距离远小于种层厚度,因此模型定义为深仓型[32],种箱为不规则形状,为便于分析与计算,将其简化成半径为150 mm的圆柱体,取种箱内微小物料层dj,横截面积为A,周长为C,物料层受力由垂直压应力σ1和水平压应力σ2组成,蒜种的受力平衡方程为
对式(9)两端积分,代入初始条件y=0,σ1=0得
式中fs为蒜种与种箱(45#钢)的摩擦系数,试验测定为0.47;γ为蒜种的重度,kN/m3;K为压力比;j为种层厚度,cm;Φr为蒜种的休止角,(°);计算A/C=0.075 m,基于前期研究[30,33],蒜种容重8.16 kN/m3,将蒜种休止角为26.51°代入式(10),确定压力比K为 0.383。应用 MATLAB求解式(11)获得蒜种层厚度与应力关系图,如图4所示。随种层厚度增加,垂直压应力和水平压应力逐渐增大,当种层厚度≥150 mm,压应力逐渐减缓趋于水平,结合种箱空间尺寸,确定种层厚度范围为150~550 mm(满仓)。
2.3 第二充种室
第二充种室是保证降低漏充率关键结构,主要由链条传输通道和容种通道及毛刷组成,如图5所示。容种通道安装于护种板下侧保证顺利承接蒜种,依据二级取种勺的间距确定容种通道的长度为130 mm,为保证容种通道内同一平面只有 1粒蒜种,依据取种勺开口长径尺寸确定直径为36 mm。依据选取的12A型链条尺寸,链条传输通道的宽度和长度分别设计为20和30 mm。毛刷设置在链条传输通道和容种通道交界处,二级取种勺运转时会与毛刷产生摩擦,为增加使用寿命,选用厚度规格为5 mm的毛刷。
作业时,在一级取种勺无重种和无连续漏取蒜种的理想状态下,二级取种勺从初始位置向上运行。一级取种勺在第一充种室内连续取种 2次,第一次漏取蒜种,第二次单粒取种;第一次投放后,二级取种勺在第二充种室内为无蒜种,第二次投放后,二级取种勺承接单粒蒜种,如图6a所示。一级取种勺在第一充种室内连续取种 2次,第一次单粒取种,第二次漏取蒜种;第一次投放后,二级取种勺在第二充种室内承接到单粒蒜种,第二次投放后,二级取种勺内没有蒜种充入,实现单粒播种,如图6b所示。一级取种勺在第一充种室内连续2次单粒取种,2次投放后,二级取种勺在第二充种室内承接到目标蒜种和多余蒜种,如图6c所示。
针对工况3,需清掉多余蒜种,保留目标蒜种,在毛刷作用下,多余蒜种处于不稳定的“波动”状态,在容种通道内产生相对滑移,多余蒜种向远离毛刷的方向移动,蒜种在容种通道内的受力方程为
式中Ni(i=1,2)为毛刷和目标蒜种对多余蒜种的支持力,N;fi(i=1,2)为毛刷和目标蒜种对多余蒜种的摩擦力,N;ai为多余蒜种的加速度,m/s2;MO3为多余大蒜所受力对蒜种间接触点O3产生的力矩,N·m;Δω/Δt为多余蒜种的角加速度,rad/s2。
多余蒜种在容种通道内经过“波动”后达到短暂平衡状态,当一级取种勺携带蒜种离开容种通道后,多余蒜种的平衡状态被打破,在自身重力作用下落入种箱实现清种。结合预试验发现,一、二级取种勺速度设置不同,第二充种室内二级取种勺在容种通道承接蒜种位置则不同,清种效果也不同,本文定义一级取种勺速度与二级取种勺速度的比值为取种速比,根据一、二级取种勺速度的范围,确定取种速比为0.5~1。
3 EDEM离散元仿真
综上分析,确定一级取种勺速度(0.08~0.25 m/s)、种层厚度(150~550 mm)和取种速比(0.5~1)为主要影响因素;为了进一步优化参数,采用EDEM软件进行离散元单因素试验仿真分析。
3.1 仿真模型
为便于分析,减少计算量,将双充种室大蒜单粒取种装置三维模型精简后以.igs格式导入 EDEM软件中。以金乡大蒜为研究对象,根据测量尺寸,采用多球面填充方式建立蒜种颗粒模型,选择Hertz-Mindlin无滑动接触模型作为颗粒间及颗粒与取种装置间的接触模型,蒜种颗粒与种箱(45#钢)碰撞恢复系数、静摩擦系数和滑动摩擦系数分别为0.427,0.473和0.203;蒜种颗粒与取种勺(树脂)碰撞恢复系数、静摩擦系数和滑动摩擦系数分别为0.432,0.466和0.214,基本仿真参数如表2所示[6,13,34]。采用Random分布随机生成蒜种,分布系数为蒜种模型大小的0.9~1.1倍。传动链带动取种勺运动并实现蒜种充种的动作主要应用Add Kinematic模块中的Add Linear Translation和Add Linear Rotation指令。

表2 离散元模型基本仿真参数Table 2 Basic parameters of discrete element model
3.2 试验因素与评价指标
试验参考《GB/T6973—2005单粒(精密)播种机试验方法》[35]和《DB37/T3705—2019大蒜播种机通用技术规范》[36],为便于观察仿真过程中蒜种运动形式,设置取种装置以实体模型形式显示。
单粒合格率、漏充率、重播率计算方法如下:
式中N1为取种勺内只有1粒蒜种;N0为取种勺投放蒜种的总次数。
式中N2为取种勺内没有蒜种。
式中N3为取种勺内有2粒或2粒以上蒜种。
3.3 单因素仿真试验
3.3.1 一级取种勺速度对充种性能的影响
研究一级取种勺速度为0.07、0.10、0.13、0.16、0.19、0.22、0.25 m/s情况下对各指标的影响,需固定种层厚度值。由于种层过厚重播率增加,过低漏充率增加,因此仿真设置生成种层厚度为350 mm。动态颗粒工厂蒜种的生产率分别设置为 0.02、0.028、0.036、0.044、0.052、0.06、0.068 kg/s,维持不同取种勺速度取种后种层厚度的稳定。记录稳定工作状态下100次一级取种勺取种过程,重复3次,结果取均值,应用后处理 Setup Selections模块下的Geometry Bin,输出7个水平沿传动链运动方向下与接触传动链蒜种群的平均速度,结果如图7所示。随着一级取种勺速度增大,种群的平均速度变大,漏充率先降后升,重播率降低;当一级取种勺速度为0.13 m/s时,漏充率较低。一级取种勺速度较小时,接触传动链蒜种群与一级取种勺的速度差值小,种群活跃度低,重播率高;一级取种勺速度较高时,充种时间缩短导致漏充率变高。
一级取种勺速度为0.13 m/s时,蒜种运动状态如图8所示。由图可知,一级取种勺携带蒜种向上运动时,沿传动链运动方向的蒜种群被搅动,向种箱边缘区域流动(状态 1),该区域种群速度小于一级取种勺速度,产生一定速度差,保持种群流动性;当一级取种勺离开种群后,种群活跃度增加,位于种箱边缘区域的蒜种呈现迅速回填趋势(状态2),蒜种孔隙率降低,充种性能提高。
3.3.2 种层厚度对充种性能的影响
根据一级取种勺速度对充种性能的影响分析,取一级取种勺速度为0.13 m/s,种层厚度设置为150、250、350、450、550 mm共5个水平分析种层厚度对充种性能的影响。设置动态颗粒工厂以生产率0.036 kg/s生成下落蒜种,维持取种时种层厚度的稳定。结果如表3所示。由表3可知,随着种层厚度的增加,单粒合格率先增大后减小,漏充率逐渐减小,重播率逐渐增加;当种层厚度过低时,漏充率增大且出现了连续漏充的现象,不利于第二充种室的充种。综合比较,较优种层厚度为350 mm。

表3 不同种层厚度的评价指标仿真结果Table 3 Simulation results of evaluation indicator for different seed layer thicknesses
3.3.3 取种速比对充种性能的影响
根据一级取种勺速度、种层厚度对充种性能的影响分析,取一级取种勺速度为0.13 m/s,种层厚度为350 mm;二级取种勺速度选0.13、0.15、0.17、0.20和0.25 m/s,对应取种速比分别为 1.00、0.88、0.76、0.64和 0.52,以下落至第二充种室目标蒜种和多余蒜种为研究对象进行仿真试验,应用EDEM后处理Setup Selections模块下Manual Selection功能,输出不同取种速比下蒜种的平均速度。
一级取种勺将蒜种投放进入第二充种室的容种通道内,下落蒜种的速度逐渐增大并到达峰值,传动链带动二级取种勺上升并承接到下落的蒜种,此时蒜种速度骤降,稳定后同二级取种勺匀速向上运动,其运动过程如图9所示。取种速比较小时,蒜种与二级取种勺的接触时间短,二级取种勺携带蒜种在容种通道时间增长。
图10为不同速比下被清掉多余蒜种的速度变化曲线,由图10可知,当取种速比为0.52时,1.85~2.4 s为多余蒜种与目标蒜种一同叠放在二级取种勺向上运动的时间段,此过程时间长,多余蒜种的速度处于较为稳定的阶段,清种能力较弱;当取种速比为0.76时,1.96~2.08 s为多余蒜种与目标蒜种一同叠放在二级取种勺内向上运动的时间段,此过程多余蒜种的速度呈现波动,表明多余蒜种处于不稳定的状态,易被清掉,2.08~2.36 s为多余蒜种被清掉回落到种箱的时间段,曲线呈现“双峰”状态,清种效果较优;当取种速比为1时,没有多余蒜种和目标蒜种叠放在二级取种勺内向上运动的过程,表明此取种速比下,多余蒜种未充入第二充种室,若此时一级取种勺内没有蒜种投放,第二充种室内出现漏充现象。
4 台架试验
4.1 试验材料与设备
为了测试取种装置性能,采用自制的试验台架在山东农业大学农机107实验室进行台架试验,如图11所示。试验材料选择山东地区广泛种植的金乡大蒜,蒜种含水率为48.7%,单粒蒜种质量为4.5~9 g。取种装置固定在安装架上,交流齿轮调速电机(转速0~54 r/min连续可调)通过交流调速器控制一二级取种勺速度,单粒合格率、漏充率、重播率之和为 100%[14],已知单粒合格率、漏充率,可求得重播率,取种装置设计的核心目是提高蒜种单粒合格率减少漏充率,因此以单粒合格率和漏充率作为衡量取种装置工作性能的评价指标,待取种装置工作稳定后,统计取种装置上二级取种勺500次投种情况,每组试验重复3次,结果取均值。
4.2 试验方法
依据前期试验,选择一级取种勺速度X1、取种速比X2、种层厚度X3为试验因素,依据Box-Behnken试验设计方法[28],进行三因素三水平正交试验,试验因素和水平如表4所示。

表4 试验因素和水平Table 4 Factors and levels of test
4.3 试验结果与分析
4.3.1 试验结果
试验方案及结果如表5所示,运用Design Expert 8.0.6数据分析软件对试验数据进行多元回归拟合分析,得到蒜种单粒合格率y1、漏充率y2的回归方程为

表5 试验方案与结果Table 5 Experiment design and results
试验结果及回归方程的方差分析结果见表6。由表6得,单粒合格率、漏充率的回归模型拟合度极显著(P<0.01),且各回归模型失拟项不显著,表明回归模型拟合度高;决定系数分别为0.970 8和0.983 4,表明回归模型对样本数据解释程度高达 97%以上,模型信噪比分别为 14.491和18.475,均大于4,表明模型较优可以用于参数优化。由方差分析知,试验因素对单粒合格率影响顺序依次为X3>X1>X2,试验因素对漏充率的影响顺序依次为X1>X3>X2。

表6 回归模型方差分析Table 6 Variance analysis of regression model
4.3.2 响应面分析
依据单粒合格率和漏充率回归模型,将其中2个试验因素置于0水平,分析其他因素对试验指标的影响,绘制响应面图,如图12所示。由图12a知,种层厚度处于 0水平(350 mm),当取种速比一定,单粒合格率随着一级取种勺速度的增加先增大后减小;当一级取种勺速度一定,单粒合格率先随着取种速比的增加先增大后减小。由图12b知,取种速比处于0水平(0.76),当一级取种勺速度一定,单粒合格率随着种层厚度的增加先增大后减小;当种层厚度一定,单粒合格率随着一级取种勺速度的增加先增大后减小。
由图12d知,种层厚度处于0水平(350 mm),当取种速比一定,漏充率随着一级取种勺速度的增加先减小后增大;当一级取种勺速度一定,漏充率随着取种速比的增加先减小后增大。由图12e知,取种速比处于 0水平(0.76),当一级取种勺速度一定,漏充率随着种层厚度的增加而减小;当种层厚度一定,漏充率随着一级取种勺速度的增加先减小后增大。由图12f知,一级取种勺速度处于0水平(0.13 m/s),当取种速比一定,漏充率随着种层厚度的增加而减小;当种层厚度一定时,漏充率随着取种速比的增加先减小后增大。
4.3.3 参数优化与试验验证
为了使试验台达到最佳工作性能,对试验中的影响因素进行优化,目标函数与约束条件为
利用Design-Expert软件对参数进行最优化求解,得到最佳参数组合:一级取种勺速度为0.12 m/s、取种速比为0.75、种层厚度为372.68 mm,模型预测单粒合格率为95.23%,漏充率为1.17%,重播率为3.6%。播种时种层厚度实时变化,圆整后,一级取种勺速度取0.12 m/s、取种速比取0.75,以种层厚度最佳值370 mm为中心,10 mm为1个水平,种层厚度范围为290~450 mm开展试验,重复 3次结果取平均值,其中各个评价指标的变化规律与图11反映规律一致且当种层厚度范围为360~390 mm时作业效果最优,单粒合格率、漏充率及重播率均值分别为95.38%、1.18%、和3.44%,单粒合格率、漏充率及重播率变异系数分别为 0.32%、6.11%、4.15%;表明种层厚度在360~390 mm内取种装置的性能差异不大,结果与模型预测结果相对误差小于5%。
4.3.4 蒜种机械破损率与品种适应性试验
选取最优工作参数组合,进行蒜种机械破损率试验,蒜种净度100%,蒜种外观无损伤,根据《DB37/T3705 —2019大蒜播种机通用技术规范》[36]和《GB/T 5262—2008农业机械试验条件》[37],按式(19)计算蒜种机械破损率。
式中Pj为蒜种机械破损率,%;Py为蒜种原始破损率,%;Wp为导种口排出蒜种样本中破损蒜种质量,g;Wz导种口排出蒜种样本总质量,g。接取从导种口排出的蒜种,每次试验取样1 000粒大蒜,重复3次试验,结果取平均值;人工测量记录排出蒜种质量均值为5 727.94 g,破损蒜种质量均值为 29.79 g,计算蒜种机械破损率均值为0.52%,符合标准要求。
在人工分选蒜种等级后,更换不同种类大蒜对应尺寸的取种勺,取种勺采用3D打印,相同试验条件下对3个品种大蒜Ⅰ、Ⅱ、Ⅲ等级的蒜种分别进行品种适应性试验,重复3次取平均值,试验结果如表7所示。

表7 品种适应性试验结果Table 7 Results of variety adaptability test
由表7可知,最佳参数组合条件下,取种装置对 3个品种的大蒜具有较好的适应性,各项作业指标差别较小,且3个大蒜品种中对Ⅱ级蒜种适应性最好。
4.4 田间试验
将排种器组装在手扶式大蒜播种机上,配套动力为154F汽油发动机。2020年10月,在山东省济宁市金乡县卜集镇进行田间试验,如图13所示。试验材料为金乡大蒜分级后的Ⅱ类大蒜,试验地土壤类型为壤土,取一级取种勺速度为0.12 m/s、取种速比为0.75、种层厚度范围为360~390 mm,种箱内壁设有刻度线,人跟随机器一同前进,当种层厚度低于360 mm的刻度线时,由人工向种箱内添加蒜种,始终保持种层厚度在360~390 mm刻度线以内。机器稳定工作后,随机选取3组,每组行进5 m距离统计1次插播穴内种植情况,取平均值计算评价指标。最佳参数组合的作业工况下,单粒合格率为95.85%,漏充率为1.2%,重播率为2.95%,播种效率为0.035~0.055 hm2/h。试验结果相对于台架验证试验,单粒合格率和漏充率相对误差小于 5%,重播率相对误差较高,主要是由于田间作业时,土地不平整且机器作业相对于试验台架产生的振动较大。本研究取种装置与现有大蒜单粒取种装置[13-15]的作业性能对比如表8所示。由表8可知,双充种室取种装置相较于爪式循环、勺链式取种装置[13,15]田间试验的(苍山大蒜)单粒合格率分别提高2.75%、1.05%,漏充率分别降低2.6%、0.8%,重播率分别降低0.15%、0.25%;相较于轮勺式取种装置[16]室内台架试验(金乡大蒜)的单粒合格率提高4.75%,漏充率和重播率分别降低4.3%和0.45%。
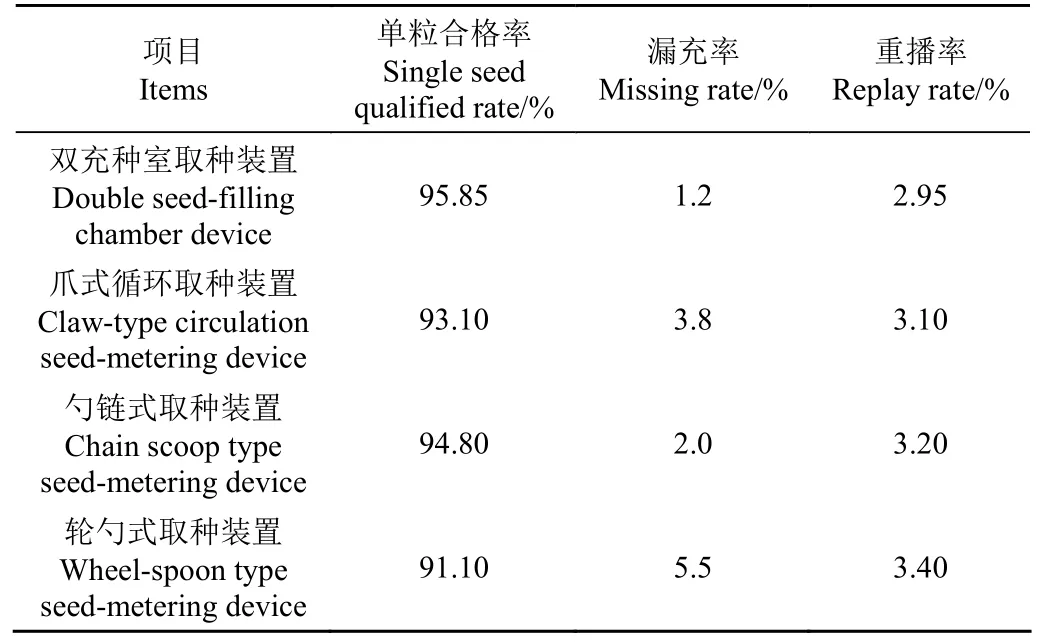
表8 取种装置作业性能对比Table 8 Operation performance comparison of seed metering device
5 结 论
1)设计了双充种室大蒜单粒取种装置,采用一、二级取种勺前后串联排列的方式,通过离散元仿真软件EDEM 进行了单因素仿真试验,研究一级取种勺速度、种层厚度参数对取种效果的影响,明晰了双充种室取种、清种的内在机理,确定了合理的取种速比,保证了一、二级取种勺协调取种,使第二充种室内蒜种数量不少于1粒,可有效实现单粒取种、降低蒜种漏充率。
2)采用Box-Behnken中心组合设计方案建立了以单粒合格率和漏充率为评价指标的响应面回归模型,通过方差分析,得出了一级取种勺速度、种层厚度、取种速比对评价指标的影响规律;圆整后优化参数组合:一级取种勺速度为0.12 m/s、取种速比为0.75、种层厚度范围为 360~390 mm,作业性能最优,此时取种装置的单粒合格率为95.38%,漏充率为1.18%,重播率为3.44%。
3)蒜种机械破损率试验表明,蒜种机械破碎率为0.52%,符合标准要求;品种适应性试验结果表明取种装置对 3类供试大蒜中Ⅱ级蒜种具有较优适应性;开展了田间试验,田间试验结果满足作业要求,作业效果优于现有爪式循环、勺链式、轮勺式大蒜单粒取种装置。
猜你喜欢
四川蚕业(2022年1期)2022-06-06 02:03:36
中国食品(2021年21期)2021-11-07 10:30:48
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
农机化研究(2020年4期)2020-10-19 07:01:52
四川蚕业(2020年4期)2020-02-10 06:14:42
江苏农业学报(2018年6期)2019-01-04 01:18:58
科学家(2017年1期)2017-04-11 22:01:14
制导与引信(2016年3期)2016-03-20 16:02:02
农民科技培训(2016年3期)2016-03-16 13:45:59
风能(2014年1期)2014-04-26 00:00:40
