
基于社会蜘蛛群优化的粒子滤波算法研究
2021-10-11 05:54谷旭平唐大全
自动化仪表 2021年8期
谷旭平,唐大全
(海军航空大学航空作战勤务学院,山东 烟台 264001)
0 引言
解决非线性问题,一般采用扩展卡尔曼滤波的方法,并且其随机量须符合高斯分布。但粒子滤波(particle filter,PF)的出现打破了解决非线性问题的桎梏[1]。粒子滤波在解决非线性、非高斯问题上的突破,使其应用范围异常广泛。粒子滤波在视觉跟踪领域,目标定位、导航、跟踪领域以及通信与信号处理领域都发挥着重要作用[2-5]。
粒子退化是标准粒子滤波器的主要缺陷[6-7],解决方法之一就是重采样。但重采样会降低粒子多样性,难以保证估计精度。文献[8]在重采样之后加入马尔科夫链蒙特卡洛(Markov chain Monte Carlo,MCMC)移动处理,减少了粒子相关性,使粒子分布与状态概率密度函数一致,保证了粒子分布的合理性;但算法的收敛性很难保证,且计算量大。文献[9]利用正规则方法计算粒子的后验概率密度,有效地缓解了重采样带来的样本枯竭与粒子退化问题,但高维的正规则难以实现。文献[10]在重采样前,依据似然值的大小对原粒子权值进行修正,保证重采样后粒子向高似然区域移动。该算法在重采样后,更接近状态真值,但每个粒子需要计算两次权值以及似然值。这就伴随着大计算量的问题,难以保证算法的实时性。文献[11]~文献[17]依据自然界生物种群的寻优特性,对粒子滤波的重采样过程进行改进,在一定程度上改善了算法的滤波精度,提高了粒子多样性。
本文将社会蜘蛛群的寻优特性[18-19]引入粒子滤波的重采样过程中。一方面,依据有效粒子数判断是否进行重采样;另一方面,在复制大权重粒子时,在其期望值附近添加随机粒子以保证粒子多样性。同时,利用群体突变、动态自适应权重调节,以及将遗传算法中的交叉概率[20]引入蜘蛛群繁殖的过程中,保证了算法的全局以及局部收敛能力。
1 粒子滤波原理
粒子滤波的基本思想是:根据系统状态的经验分布在状态空间产生的粒子集,不断调整粒子的权重和位置,通过调整的粒子信息修正最初的经验分布。
状态空间的状态转移模型以及量测模型为:
xk=f(xk-1,vk-1)
(1)
zk=h(xk,nk)
(2)
式中:xk∈Rnx为k时刻的状态向量;zk∈Rnz为k时刻的量测值;vk∈Rnv和nk∈Rnn为过程和量测噪声,f:Rnx→Rnx,h:Rnz→Rnz为有界非线性映射。

(3)
式中:权值由重采样选择。
(4)
重要性密度函数分解为:
q(x0:k|z1:k)=q(xk|x0:k-1,z1:k)q(x0:k-1|z1:k-1)
(5)

后验概率密度函数可表示为:

(6)
将式(4)、式(5)代入式(6),即可得到重要性权重的计算公式:
(7)

(8)
选择易于实现的先验概率密度作为重要性密度函数。将式(8)代入式(7),则重要性权重简化为:
(9)
权重归一化,即:
(10)
后验概率密度p(xk|z1:k)为:
(11)
则k时刻状态的估计值为:
(12)
2 社会蜘蛛群优化算法
蜘蛛群优化(social spider optimization,SSO)算法将优化空间抽象为一张信息交流网,蜘蛛通过身体接触以及网的振动来传递信息。
2.1 蜘蛛群分工
在社会蜘蛛群体中,雌雄蜘蛛比重不同,一般雌蜘蛛占整个种群数量N的65%~90%。雌、雄蜘蛛种群数量Nf、Nm分别为:
Nf=floor[(0.9-r×0.25)×N]
(13)
Nm=N-Nf
(14)
式中:r为[0,1]之间的随机数;floor()为向下取整函数。
雌、雄蜘蛛的初始位置fi,j、mg,j分别为:
(15)
(16)

蜘蛛个体权重为:
(17)
式中:J(si)为第i只蜘蛛的适应度。
bs、ws分别为适应度的极大值与极小值:
(18)
(19)
2.2 蜘蛛的移动
2.2.1 移动的诱因
社会蜘蛛在信息交流网中通过彼此之间的振动,感知对方位置。蜘蛛个体的权重以及彼此的距离是影响振动的关键因素。振动表达式为:
(20)
式中:di,j=‖si-sj‖为蜘蛛个体i、j的欧式距离。
蜘蛛个体接收到的振动来源有3种:
①权重较大,距离较近的雌蜘蛛个体为:
(21)
②权重最大的蜘蛛个体为:
(22)
③权重较大,距离最近的雄蜘蛛个体为:
(23)
2.2.2 雌雄蜘蛛位置移动
蜘蛛个体位置的移动主要体现在对同性和异性的排斥上,其位置移动算式为:

(24)

(25)

2.3 蜘蛛种群的更新
在交配半径范围内的雌雄蜘蛛个体,通过交配产生新蜘蛛个体。新个体的权重受到上一代个体权重影响。新个体与种群质量较轻的个体进行比较,淘汰其中权重较轻的个体来保持种群数量不变。交配半径R以及蜘蛛影响概率pi为:
(26)
(27)
3 社会蜘蛛群优化的粒子滤波算法
蜘蛛群的寻优过程就是粒子滤波的重采样过程,通过对SSO进行改进,来保持粒子多样性以及算法的收敛能力。
3.1 粒子多样性的改进
重采样不仅使粒子多样性下降,也增加了计算量,影响粒子滤波的实时性能。采用有效粒子数Neff来衡量粒子多样性。有效粒子数的计算式为:
(28)

由于噪声干扰和其他原因,全局最优粒子权重可能不是最大的。重采样可能导致丢弃全局最优粒子,不能收敛到真实状态。因此在复制大权重粒子时,根据复制数量在期望值附近添加少量随机粒子。在粒子不发散的情况下,增加大权重粒子周围的粒子以保持多样性,以避免出现次优结果。
重采样时,记录删除的小权重粒子Ndel的数量,从大权重粒子中选择Nx个粒子,并使用式(29),获得可复制粒子数M。将大权重粒子的权重作为平均值,并使其成为标准的高斯分布。从高斯分布中随机选择M个粒子作为重采样结果。
(29)
3.2 收敛性能的改进
3.2.1 群体突变
在迭代前期,为避免算法陷入局部最优解,在保证最优粒子的前提下,对其余粒子进行群体突变。引入动态的次数因子temp。因为每个计算周期中,粒子收敛的迭代次数之和是不一样的,当迭代次数累计到预先规定的数值temp时,就初始化粒子。这可使粒子持续地在较大的空间内寻优,避免算法陷入局部最优。
(30)
3.2.2 动态自适应权重调节
①寻优速度因子。
在粒子寻优的过程中,全局最优值取决于个体最优值的变化,也反映了粒子运动效果。在优化过程中,当前迭代的全局最优值大于或等于上一轮迭代的全局最优值。
定义寻优速度因子Mspeed:
(31)
式中:Nbest为当前迭代最优值;pbest为上一轮迭代最优值。
Mspeed值越小,表示寻优速度越快。经过一定迭代次数,该值会保持在1,表示算法找到最优解。
②寻优程度因子。
定义寻优程度因子Gather:
(32)
XP=exp{min[(Nbest×N-Nsum),(Nsum-
Nbest×N)]}
(33)
式中:Nsum为当前迭代次数粒子的适应度之和;Gather为粒子的寻优程度,0≤Gather≤1。
Gather在一定程度上反映了粒子的多样性。Gather值越大,粒子的寻优程度越好,粒子多样性越差。经过一定的迭代次数后,Gather值会保持在1。如果此时算法陷入局部最优,那么不容易跳出局部最优。
③权重调节。
根据重采样的特点,蜘蛛群优化算法中的粒子权重w应依据粒子的寻优速度以及程度的变化而变化。粒子的寻优速度越快,粒子越可保持大范围寻优,其全局寻优能力越强。当粒子寻优速度变慢时,通过调整w的大小,可保证粒子在小范围空间内搜索,从而提高其局部收敛能力。
粒子越分散,算法就不易陷入局部最优。但是随粒子的寻优程度的不断提高,算法易陷入局部最优。此时可增大粒子的搜索范围,从而提高粒子的全局收敛能力。
综上,粒子的权重w为:
w=1-wa×Mspeed+ws×Gather
(34)
式中:wm和wg为常数,wm∈[0.4,0.6],wg∈[0.05,0.20]。
3.2.3 新粒子生成速度
为了进一步保证算法的收敛能力,将遗传算法[21]中改进的交叉操作引入SSO。交叉操作的作用主要是限制子蜘蛛的诞生速度。在算法迭代初期,为了提高SSO全局寻优效率,一般交叉概率选取较大值;随着迭代次数的逐渐增加,为了保证SSO局部寻优能力,选取较小的交叉概率。交叉操作的计算式为:
(35)
式中:PS为自适应交叉概率;PSO为自适应参数;γ为迭代次数;kmax为设置度量。
本文取PSO=0.85、kmax=20。
3.3 改进的粒子滤波算法步骤
改进的社会蜘蛛群粒子滤波算法步骤如下。
(1)初始化。在k=0时刻,依据先验概率分布p(x0)进行采样,选取N个初始样本,并根据式(13)、式(14)初始化雌、雄蜘蛛粒子数目Nf、Nm。然后,根据式(15)、式(16)初始化雌、雄蜘蛛的位置fi,j、mg,j,设定temp。

(3)采用改进的SSO算法来优化粒子的重采样过程。
①依据式(28)判断是否进行重采样。
②根据式(17)、式(20)~式(23)计算每个蜘蛛的振动强度。
③若当前迭代次数大于temp,在保持最优粒子位置不变的情况下,依据式(30)进行小权重粒子位置移动;否则,依据式(24)、式(25)移动雌、雄蜘蛛的位置。
④根据式(26)、式(27),雌、雄蜘蛛在给定交配半径内产生新的粒子,并依据式(35)维持不同时期新粒子产生的速率,保证不同时期的收敛速度。
⑤依据式(31)~式(34),动态调整粒子权重。
(4)计算迭代截止时粒子的权重,并用式(10)进行归一化处理。
(5)根据式(12),输出状态估计值。
3.4 改进粒子滤波算法收敛性验证

(36)
式中:t为蜘蛛粒子个体到达局部最优位置的时间;若E(t)存在且有界,则该算法是全局收敛的。


条件1说明了蜘蛛粒子个体与最优位置之间的距离在一个多项式的范围内。条件2说明蜘蛛粒子个体不断趋于最优位置时,蜘蛛粒子群的移动在一个多项式倒数的范围内。
当满足上述两个条件时,E(t)存在且有界,蜘蛛群算法的时间估计为:
(37)
本文对SSO进行改进,但在每一次迭代后,蜘蛛粒子群体必将进入最优状态,因此优化后算法依然满足上述条件;采用遗传算法的交叉概率,动态自适应调整权重,群体突变,蜘蛛粒子群整体的移动并没有改变,因此依然满足上述条件。综上所述,改进的SSO依然保持着全局收敛能力,且该算法是收敛的。
4 仿真分析
本试验选用一维系统来仿真基本粒子滤波,鸽群优化粒子滤波(pigeon-inspired optimization-PF,PIO-PF),改进的磷虾优化粒子滤波(improved krill herd optimization-PF,IKH-PF),布谷鸟群优化粒子滤波(cuckoo search optimization-PF,CS-PF),改进的社会蜘蛛优化粒子滤波(improved social-spider optimization-PF,ISSO-PF)在状态估计精度、实时性等方面的综合指标。
选用的一维非线性系统方程与观测方程为:
x(k)=0.9+cos(0.04πk)+0.4x(k-1)+w(k)
(38)
(39)
式中:w为服从伽马分布Λ~Γ(3,2)的过程噪声;v为符合均值为0、方差为R的高斯分布的噪声。
系统的初始状态为x(0)=0.1,仿真步长T=100。
4.1 算法精度测试
(1)在粒子数不同的情况下,滤波状态估计和估计误差绝对值分别如图1、图2所示。
①粒子数N=50、方差R=1时,仿真结果与估计误差绝对值如图1、图2(a)所示。
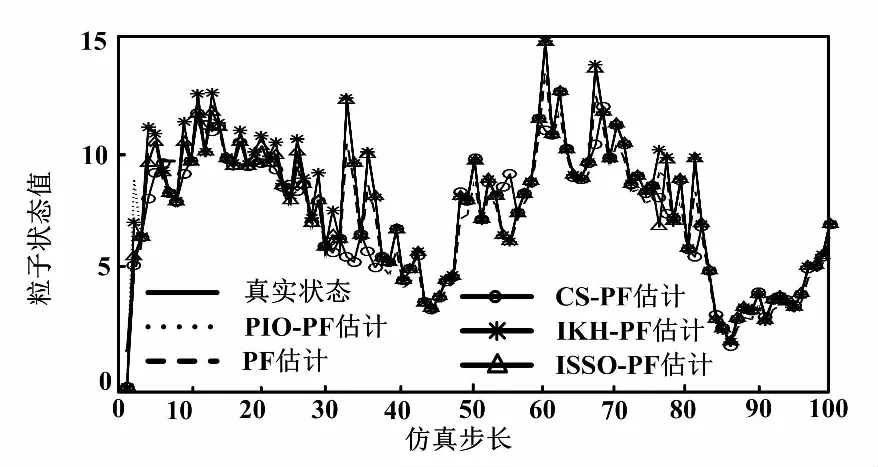
图1 滤波状态估计(N=50,R=1)
②粒子数N=100、方差R=1时,估计误差绝对值如图2(b)所示。
③粒子数N=150、方差R=1时,估计误差绝对值如图2(c)所示。
④粒子数N=200、方差R=1时,估计误差绝对值如图2(d)所示。

图2 估计误差绝对值
(2)在R=5的条件下,再进行一组试验,整体误差对比如表1所示。
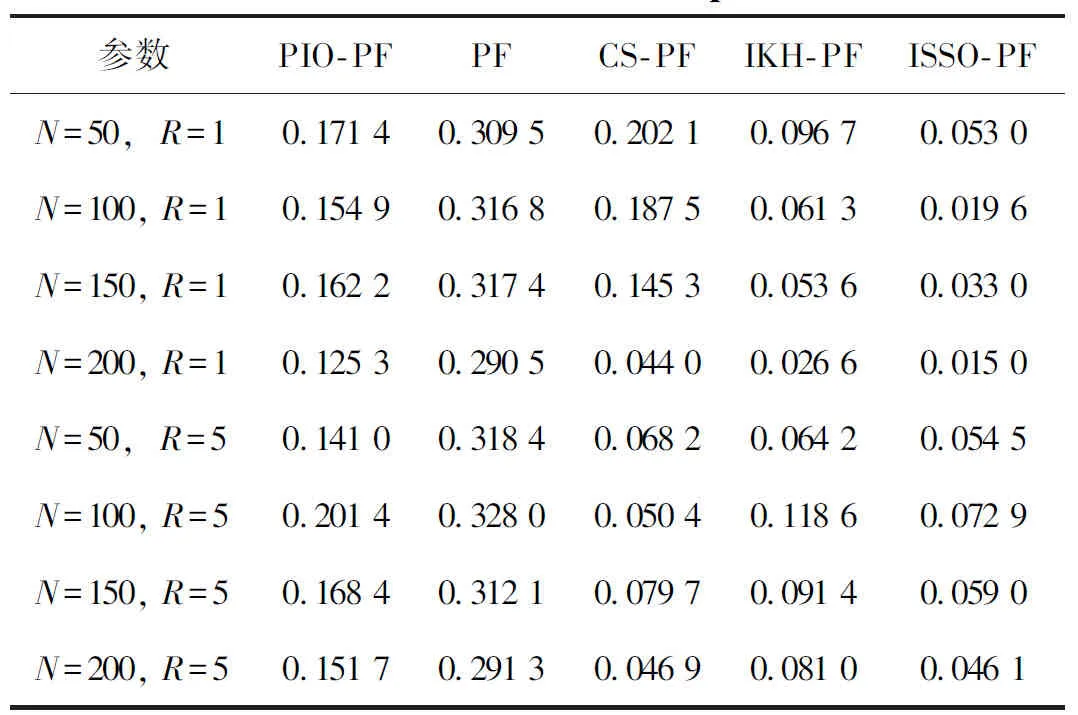
表1 整体误差对比
4.2 粒子空间分布
R=1时,选取不同的粒子总数,粒子的状态空间分布如图3所示。

图3 粒子的状态空间分布
4.3 运行时间对比
针对上述不同的仿真情况,对各算法的运行时间进行统计。
运行时间对比如表2所示。

表2 运行时间对比
4.4 试验结果分析
从图1可以看出,5种算法都很好地跟踪了系统的真实状态。从图2可以看出,对比5种滤波算法的误差绝对值,ISSO-PF算法的误差一直处于较低的水平,其他滤波算法均存在不同程度的误差起伏。从表1可以看出,整体的改进滤波算法要比普通的粒子滤波算法的误差更小,精度更高。算法误差从低到高依次为ISSO-PF、IKH-PF、PIO-PF、CS-PF、PF。
从粒子的状态空间分布可以直观地看出粒子的状态估计情况,从图3可以看出,ISSO-PF可以很好地跟踪真实值,而且随着粒子数的增加,粒子的分布越广,在真实值附近分布的粒子数越多。所以ISSO-PF算法在提高滤波精度、改善粒子贫化、增加粒子多样性方面,均有很好的效果。
算法的运行时间能够很好地体现算法的开销问题。在算法实时性要求较高的情况下,该指标尤为重要。从表2可以看出,整体的计算时间消耗最低的是PF,然后依次是ISSO-PF、PIO-PF、CS-PF、IKH-PF。由此可知,滤波精度的提高是以运算时间为代价的,但是ISSO-PF的实时性能较其他改进算法,还是有较大改善的。
5 结论
为了改善粒子滤波的粒子退化、增强粒子多样性,本文结合了SSO与粒子滤波算法的特点,采用改进的SSO优化粒子滤波的重采样过程。为了改善粒子退化:一方面,依据有效粒子数,选择是否进行重采样;另一方面,在重采样复制大权重粒子的过程中,在大权重粒子附近添加随机粒子,保证粒子的多样性。同时,利用群体突变、动态自适应权重调节,以及将遗传算法中的交叉概率引入蜘蛛群繁殖的过程中,保证了算法的全局以及局部收敛能力。试验结果表明,ISSO-PF算法提高了滤波精度,改善了粒子退化,增加了粒子多样性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
金桥(2018年4期)2018-09-26
小朋友·快乐手工(2018年3期)2018-04-22
小学阅读指南·低年级版(2017年6期)2017-06-12
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
小朋友·快乐手工(2015年1期)2015-03-13
中国卫生(2014年5期)2014-11-10
电子设计工程(2014年20期)2014-02-27
