
基于无人机可见光数据荒漠灌木覆盖度提取方法研究
2021-10-11 05:14崔万新李锦荣司前程罗祥英李映坤
水土保持研究 2021年6期
崔万新,李锦荣,司前程,王 茹,罗祥英,杨 锋,李映坤
(1.内蒙古农业大学,呼和浩特 010018;2.水利部 牧区水利科学研究所,呼和浩特 010020)
中国灌丛面积分布广泛,超过全国陆地面积的20%[1]。随着荒漠化加剧,生态系统变得脆弱,而灌木因为繁多的种类、分布地区的广泛、顽强的生命力、对恶劣环境极强的适应力和宽泛的适生范围等特点,在改良土壤、水土保持、防风固沙、恢复荒漠生态系统和维持荒漠生态系统的生物多样性方面有重要作用[2]。
植被生物量是反映植被生产力的重要体现,生物量的准确估算不仅是确定植被碳储量的主要任务,还是确定生态系统中能量分配、转化和固定的主要指标[3]。因此准确估算灌木生物量,可为荒漠灌木估算碳库提供依据。生物量的估算一般依据生物量模型,模型常用指标有植被覆盖度、株高、冠幅等易测因子[4]。其中,植被覆盖度是模型中的一个常用因子。植被覆盖度一般以样方法估算,灌木样方大小一般为5 m×5 m或者10 m×10 m。受区域气候影响,荒漠灌木分布稀疏,小面积的测量代表性差,大面积调查受到人力、物力等限制。卫星遥感影像作为植被指数提取的主要数据源,通过植被指数与植被覆盖度建立数量关系去估算植被覆盖度,在大尺度区域上受到青睐[5-6]。与传统的卫星遥感相比,无人机遥感具有高时效性、数据易获取、空间分辨率高等优势,且成本低、不受云层干扰[7]。其应用也逐渐扩展到森林资源清查与森林病虫害防治[8]、野外植被盖度调查[9]、地上生物量估算[10]和植被生态修复等[11]领域。这些优势使得无人机在区域植被调查方面有着巨大应用前景。
目前,关于无人机植被提取的指数种类繁多,大部分植被指数都是由近红外和可见光波段构建的[7,12]。由于传感器成本等原因,可见光波段的植被指数使用也更广泛。作为一种特殊的物体,植物的反射光谱曲线具有独特的形状,不同种类的植物光谱曲线差异很大。而植被提取就是依据植物的反射率随波长的变化,适当选择和组合不同的波段去区分不同类型的植物。目前在无人机植被提取方法应用主要集中农田地物[13-15]、森林资源[16-17]、草原生态系统[18-19]、城市绿地较多[12,20-21],植被生长状况较好的区域,关于荒漠地区灌木涉及较少[9,22]。荒漠地区生境严酷、植被稀疏、叶面积退化、形成肉质茎和叶绿素含量较少[23],造成可见光波段380~700 mm的反射率较低[24],进一步导致荒漠植被光谱特征相近、区分效果较差和识别精度低。无人机可见光植被指数在荒漠植被提取的适用性、各指数的敏感性和影响因素尚无报道。鉴于此,本文以荒漠灌木为研究对象,利用无人机可见光数据对比几种应用比较广泛的植被指数在荒漠灌丛植被提取方面的敏感性,从直方图特征、阈值计算方法、地面像素分辨率对提取精度的影响,提出适用于荒漠灌木的植被指数和合理的适航高度,以期为无人机野外调查以及后期图像处理方面提供参考。
1 研究区概况
研究区位于黄河乌兰布和沙漠段东岸的杭锦旗和鄂托克旗境内,地理坐标东经106°52.246′—107°11.07′,北纬40°8.267′—40°14.626′,平均海拔高度1 073 m。该区域气候类型属典型中温带大陆性季风气候,夏季高温少雨,冬季寒冷干燥,年平均降雨量138.8 mm,年均蒸发量2 258.8 mm。年平均气温9.7℃,年平均风速3.7 m/s,最大风速15 m/s。土壤类型以风沙土为主[25]。该区域天然植物约有455种,植被类型多为强旱生灌木,主要优势灌丛植物种有红砂(Reaumuriasongarica)、四合木(Tetraenamongolica)、白刺(Nitrariatangutorum)、霸王(Zygophyllumxanthoxylon)、绵刺(Potaniniamongolica)、沙冬青(Ammopiptanthusmongolicus),草本植物为沙米(Agriophyllumsqurrosum)、沙蒿(Artemisiaordosica)。
2.1 数据的来源及处理
为验证选取的植被指数的普遍适用性与可靠性,消除样地地表差异对植被指数提取精度的影响,选择植被群落相同、植被覆盖度均为35%~40%的3个重复样地作为研究区,分别位于杭锦旗的巴音恩格尔苏木(107°11′43.46″E,40°14′24.34″N)和贡乌苏(107°0′34.49″E,40°10′40.40″N),鄂托克旗的陶思图(106°52′24.74″E,40°8′17.82″N)3个样地,相邻样地相距15~20 km。
天气状况以及太阳高度角都会影响影像拍摄效果。荒漠植物植株矮小、叶绿素含量低、叶面积较厚[26],所以选择在8月末植被长势最好的时期进行低空拍摄。拍摄时选择晴天无风或微风天气,时间11:00—15:00。航拍无人机型号DJI Phantom 4A,云台内置相机配备1英寸2 000万像素CMOS影像传感器。无人机采用等时间间隔拍照,横向重叠率75%,纵向重叠率70%,云台俯角-90°,飞行高度10~120 m,每10 m等间距航拍1次,每块样地航拍12次。研究表明,在稀疏、分布不均匀沙漠地区,50 m×50 m样方是适宜的样地大小[27],所以本研究航拍范围选择50 m×50 m。后期使用Pix4 Dmapper软件对影像进行初始化处理、点云和纹理处理、影像镶嵌;对于同一样地,不同高度航拍数据正射影像数据利用ENVI 5.2进行校正(图1)。
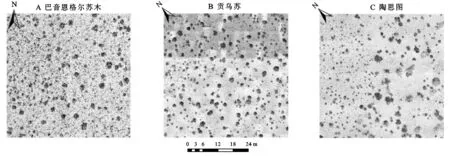
图1 研究区拼接后正射影像
2.2 植被提取
2.2.1 指数计算 利用10 m高度航拍数据,在灌木识别中选择过绿指数(EXG)[21]、可见光波段差异植被指数(VDVI)[7]、红绿比值指数(RGRI)[28]、归一化绿蓝差异指数(NGBDI)[29]、归一化绿红差异指数(NGRDI)[30]、过绿减过红指数(EXG-EXR)[30]去提取样地植被信息(公式1—6)。
EXG=2G-R-B
(1)
(2)
(3)
(4)
(5)
EXG-EXR=3g-2.4r-b
(6)

2.2.2 阈值的确定 任何一种阈值方法的确定都存在或明或暗的假设条件,从未有哪一种方法能在任何条件下都取得最佳结果[31]。阈值受影像色彩、影像分辨率的变化而变化,而固定阈值法没有能力适应这些变化。因此,本文通过直方图阈值法和阈值迭代法获取阈值。
直方图阈值法首先计算像素平均灰度值avg、标准差σ,其次以平均灰度值作为分界线,分别计算前景灰度最大值avg1max和背景最大灰度值avg2max,二者之差大于标准差,求出新阈值t1=(avg1max+avg2max)/2;否则计算像素灰度中值点midpos,若midpos>avg,小峰在左,avg1=(avg+avg2max)/2;若midpos
2.2.3 植被信息提取和分类后处理 由于灌木是荒漠地区的优势植被类型,故本研究未对草本加以分析。然而在样地中存在有少量草本的情况。在研究过程中,若草本垂直投影面积极小(如沙米),受影像分辨率限制,无人机遥感不易识别出小草本的信息,因此可不作考虑;若草本垂直投影面积较大,通过过滤处理剔除小于100像元(面积为1.30×10-3m2)的图斑,从而剔除草本带来的干扰信息。
2.2.4 植被信息提取结果的评价方法 以人工目视解译方法获取的信息为基础,利用混淆矩阵方式对各植被指数提取结果的总正确率(总体分类精度)进行验证。
(7)
(8)
(9)
式中:DR1为植被/非植被的正确率;DR为总正确率(总体分类精度);K为Kappa系数;n为类别;N为类别个数的像元总数;xii为误差矩阵对角线元素;xi+为类别的列总和;x+i为类别的行总和。
3 结果与分析
3.1 植被指数计算结果
根据公式(1)—(6),得到植被指数分布图(图2—4)。6个植被指数中,EXG的指数范围为[-255,255],EXG-EXR指数的范围为[-2.4,3],RGRI指数的范围为[0,255],VDVI,NGBDI和NGRDI指数的范围均为[-1,1]。
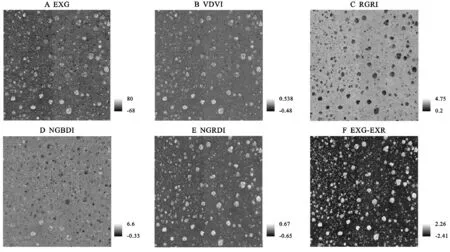
图2 巴音恩格尔苏木植被指数计算结果
EXG,VDVI,EXG-EXR,NGBDI,NGRDI在提取植被时,植被亮度高于土壤;RGRI指数在陶思图样地提取植被时,植被亮度部分高于土壤(图4),其余样地植被亮度部分低于土壤(图2—3)。贡乌苏样地内航拍受光线影响,影像色彩不均一(图3B),EXG,VDVI,RGRI,EXG-EXR和NGRDI指数灰度图表现出明显匀色现象;NGBDI指数灰度图未出现该问题,表明NGBDI指数灰度图不受光线影响(图3)。

图3 贡乌苏植被指数计算结果

图4 陶思图植被指数计算结果
3.2 植被信息识别与精度评价
为更好地从影像上将植被、非植被区分出来,以巴音恩格尔苏木样地为例,对各植被指数分布直方图进行统计(图5)。EXG和EXG-EXR为双峰特征,其余为非双峰特征,对其他两个样地直方图统计,同一植被指数峰值特征相似。对于出现双峰特征的植被指数采用直方图阈值法计算阈值,对于出现非双峰特征的使用阈值迭代法求取阈值。
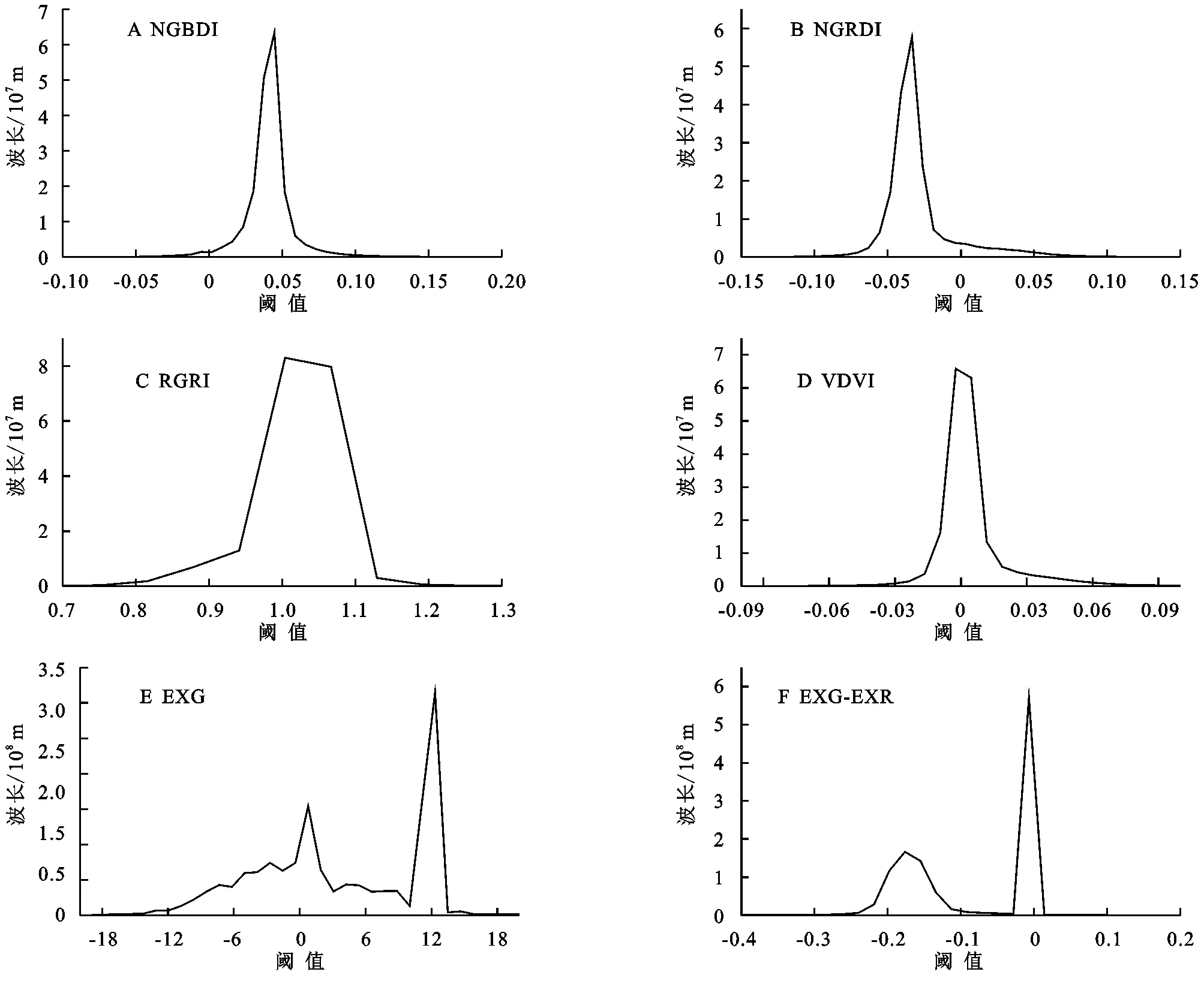
图5 各植被指数统计直方图
分别计算出6个指数的最佳阈值,使用最佳阈值提取灌木植被信息。利用目视解译方法获得的灌木图斑(图6),通过公式(7—9)得到正确率和kappa系数(表1),对各指数提取精度及其一致性验证。
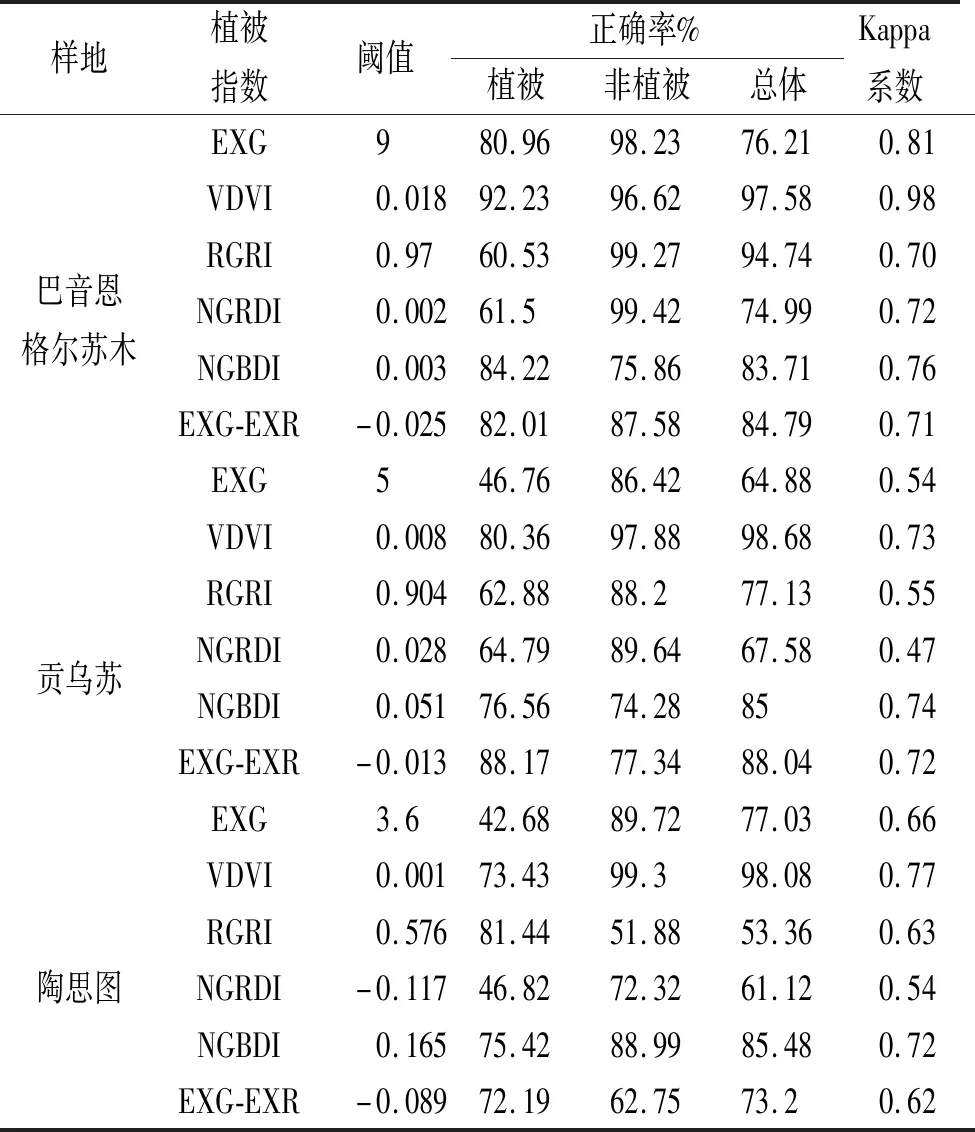
表1 各植被指数的植被提取精度评价

图6 目视解译提取结果
3个样地的6个植被指数精度分析表明:VDVI提取精度最高,平均精度98.11%,其次是EXG-EXR,平均精度为87.25%;在研究区影像色彩不均一的样地,NGBDI指数灰度图未出现阴影纹理现象,且提取精度在80%以上,满足提取要求;以上指数Kappa系数均大于0.7(K>0.61),表明以上分类提取方法与实际结果具有高度一致性。NGRDI和RGRI提取效果一般,平均提取精度保持在67.89%~75.07%;EXG指数提取植被受影像纹理影响严重,提取精度保持在64.88%~77.03%,把植被错分为裸土,造成提取效果较差。结果表明,可见光植被指数同样适用于荒漠灌木植被提取,其中VDVI植被指数的提取效果最佳,这与李东升[12]、朱孟[14]等研究结果一致。
3.3 不同分辨率对提取精度的影响
在同一研究区样地,飞行当天天气、植物阴影、太阳高度角以及图像的分辨率都会影响影像效果。对同一款无人机而言,航高和分辨率呈反比。针对不同航拍高度下影像分辨率可能造成植物扭曲或模糊等问题,分析不同影像分辨率对植被提取的影响。
以巴音恩格尔苏木样地不同分辨率的无人机影像为例,使用VDVI指数去提取植被,对比分析不同分辨率对提取精度的影响,结果见图7。GSD 0.36 cm/px提取精度达到97.45%,GSD 0.40~1.39 cm/px提取精度为89.36%~82.49%。在GSD 1.39 cm/px之后提取精度显著降低到71.11%,GSD 3.3 cm/px的提取精度仅为61.08%,无法满足80%的提取精度。随着高度递增,图像分辨率降低,提取精度降低。可见,随着地面目标地物距航拍距离的减小,地面分辨率提高,总体精度会增加[32]。
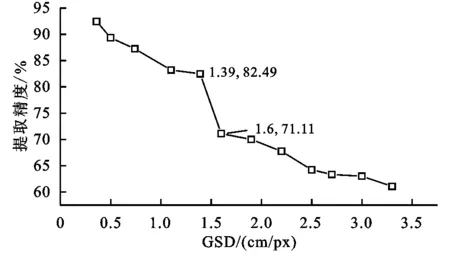
图7 无人机提取精度随分辨率变化趋势
4 讨 论
4.1 植被指数直方图特征
本研究中,当地物仅为灌木时,EXG和EXG-EXR指数出现双峰特征,NGBDI,NGRDI,RGRI,VDVI为非双峰特征。这同朱孟等[14]研究结果一致,当影像中地物仅为火龙果时,EXG,EXG-EXR指数有较明显双峰特征,NGRDI的灰度直方图双峰效果不明显;当影像中存在多个类别地物时,如建筑物、农田、草地和裸土等,EXG表现出非双峰特征,VDVI,NGRDI,NGBDI,RGRI表现出较明显双峰特征[7,12,21],与本研究中相同指数的峰值特征相悖。此外,多位学者研究表明,VDVI指数经过提取后的灰度直方图有时不具有双峰特征的类似问题[20,33]。
4.2 植被提取精度的影响因素
无人机在获取航拍影像时,受获取过程中光学透镜成像的不均匀性、大气衰减、云层、烟雾以及向阳、背阳等造成的光照条件不同等因素的影响[34],导致获取的影像存在不同区域不同程度亮度和色调等差异[35]。这些差异会不同程度地影响后续航拍图像和影像镶嵌质量的效果[36],进而导致图像之间的拼接和镶嵌结果出现明暗不均、色彩分布不协调[37],不同程度地影响航拍影像的特征提取、目标识别、分类、解译等。3个样地内,贡乌苏样地航拍影像出现影像色彩不均一现象,其中EXG指数提取精度受影像纹理影响严重,提取精度仅为64.88%;在巴音恩格尔苏木和陶思图样地的提取精度为76.21%,77.03%,这同朱孟[14]、程俊毅[38]等研究结果相近。
阈值可以被看成是目标地物与图像背景之间的分界线,它代表着一种分割准则。阈值选取的合理与否直接关系图像的分割效果与提取精度,因此如何选择分割阈值方法成为确定阈值的关键。目前常用分割阈值方法有直方图阈值法、OTSU算法和阈值迭代法,OTSU算法不需对直方图做预处理就能直接计算求得二值化阈值,但是无人机遥感影像分辨率高和数据信息量大,使用该方法得到的分割效果不太理想[39]。本研究中对出现双峰特征的植被指数,采用直方图阈值法确定阈值;对于未出现双峰特征的植被指数,使用阈值迭代法确定阈值。结果表明,根据植被指数直方图特征选择相应的阈值计算方法可以合理确定阈值。
在可见光波段中,绿色植被在绿光通道反射率高,在红光、蓝光通道反射率低,因此通过绿光通道与红光、蓝光通道间的运算能够增强植被与周围地物的差异,方便后期更加精确地提取目标信息[40]。基于以上光谱原则,本文对6种指数提取精度分析,发现VDVI,EXG-EXR和NGBDI的植被提取效果高于其他指数,平均提取精度达80%以上,Kappa系数均大于0.7(K>0.61),表明以上指数植被提取结果与实际结果具有高度一致性,适合提取荒漠地区植被。该结果与众位学者在高原地区天然植被、矿山人工植被、城镇农田和天然植被地物提取精度相近[12,20-21]。
随着地面像素分辨率GSD降低,像元尺寸增大,其对应的位置精度逐渐降低,致使目标地物的边界锯齿化现象严重,甚至可能出现一定的位置偏差,进一步影响解译精度[41]。以VDVI指数为例,在0.36~1.39 cm/px的分辨率下,提取精度为97.45%~82.49%(图6),大于1.39 cm/px分辨率下的提取精度低于80%。这与Hsieh等[32]所得的结论一致,随着地面目标地物距航拍距离的减小,总体分类误差会减小,总体精度会增加。
4.3 无人机航拍最佳飞行高度
树冠平均高度的3倍飞行高度,可以最大限度地降低较高乔木和灌木阻挡间隙内影响植被特征的可能性[42]。荒漠灌木平均高度约3~6 m,10 m和20 m飞行高度满足荒漠野外调查飞行高度。而影像后期拼接处理过程中,10 m高度正射影像拼接出现斑块缺失;20~30 m高度出现影像色彩明暗不均一,影响提取精度;在60~120 m高度,影像分辨率降低,提取精度低于80%,不满足植被提取要求;当飞行高度达到120 m时,无人机属于超视距飞行,存在空域问题。对野外植被调查而言,航拍耗电量、航拍高度、航拍时间以及数据的效果均是考虑的因素。Bipul等[43]用深度学习算法提取香蕉数量的研究中,飞行高度40 m和50 m的提取的正确率高达90%,建议作为野外调查优先选择的飞行高度,与本研究荒漠灌木在40 m和50 m航拍影像提取精度相近。综合以上因素,本研究认为40 m和50 m的飞行高度是野外调查的优先选择高度。
5 结 论
(1)在荒漠灌丛研究区内,EXG和EXG-EXR指数直方图为双峰特征,其余均为非双峰特征。指数直方图出现双峰特征时,采用直方图阈值法获取阈值;指数出现非双峰时采用阈值迭代法计算阈值。
(2)针对荒漠植被灌木,VDVI,EXG-EXR和NGBDI的植被提取精度高于其他指数,平均提取精度达80%以上,Kappa系数均大于0.7(K>0.61),提取结果与实际结果具有高度一致性,适合提取荒漠地区植被。影像出现明暗纹理不均一的情况下,提取精度除EXG指数明显受到影响外,其他指数提取精度几乎没有受到影响,特别是NGBDI灰度图并未表现出明暗纹理。地面像素分辨率降低,致使目标提取物的边界锯齿化轮廓模糊,增大地物识别过程的错误率,降低植被提取精度。在0.36~1.39 cm/px(10~50 m航高)分辨率下,提取精度为97.45%~82.49%,大于1.39 cm/px分辨率下的提取精度低于80%。综合考虑地面像素分辨率、影像拼接效果(明暗度、完整性)对提取精度的影响,40 m和50 m的飞行高度是野外调查的优先选择高度。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
草业科学(2022年3期)2022-03-26
农业机械学报(2021年8期)2021-08-27
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
时代邮刊·下半月(2020年9期)2020-09-23
农业机械学报(2019年6期)2019-06-27
摄影之友(影像视觉)(2018年12期)2019-01-28
金桥(2018年6期)2018-09-22
小学生优秀作文(低年级)(2018年6期)2018-05-19
初中生世界·八年级(2017年3期)2017-03-24
