基于CCD 成像的便携式光学远程清障系统设计
2021-10-10 03:56:14吕艳霞张首军吴志群贾丰榕赵子明
电子设计工程 2021年19期
吕艳霞,张首军,吴志群,贾丰榕,赵子明
(国网黑龙江省电力有限公司鹤岗供电公司,黑龙江鹤岗 154101)
对于高处、深处、危险等人为无法清障的位置,常常积累很多障碍物。例如电网放入金属丝通过杆塔被置于空中,风、风筝线、塑胶片、广告布等漂浮的异物很容易吹落到裸露金属线上,容易造成短路现象[1]。以往光学清障是利用激光传感器辐照燃烧异物,并将杂质蒸发掉,从而与待清障物体分离,实现远程清除,从而简化了工作流程,提高了工作人员的安全性[2]。但是,目前的光学障碍清除方法很难掌握激光传感器的光束辐照时间长度,也很容易导致激光传感器和燃烧梁的异物辐照,而光束和激光传感器将继续照射,不仅造成浪费,甚至造成网面熔化[3]。采用低功率密度的激光清障技术,可实现补光、照明等功能;采用中等功率密度的激光清障技术,可通过其热效应等作用,加速冰层融化和胶体凝固;采用高功率密度的激光清障技术,可使被照射物体燃烧、碳化、熔化,从而达到清障的目的。但是现在市场上的清障设备功能单一,携带不便,无法满足使用要求。针对现有技术的不足,设计出了一种便携式CCD 成像光学远距离清障系统,可快速设定CCD 传感器的发射功率和发散角度,携带方便。
1 系统硬件结构设计
基于CCD 成像技术,设计了一种便携式远距离清障系统[4-6]。内装重箱小车上设有电池盒,电池装在蓄电池盒内,重箱小车的前接触头设置有平/斜/平/斜,通过平移/倾斜翻盖上端连接的CCD 传感器发射器[7]。CCD 传感器发射装置具有一外壳,该外壳内装有CCD 传感器,传感器的前端连接光学瞄准器[8]。
光学瞄准器包括静态瞄准器和动态瞄准器,利用CCD 传感雷达收集外来物体数据,并对其进行实时图像处理,使工作人员能够观察物体在CCD 传感光线下燃烧或蒸发的程度,从而确定CCD 传感物体的照射时间。图1 为系统硬件结构。
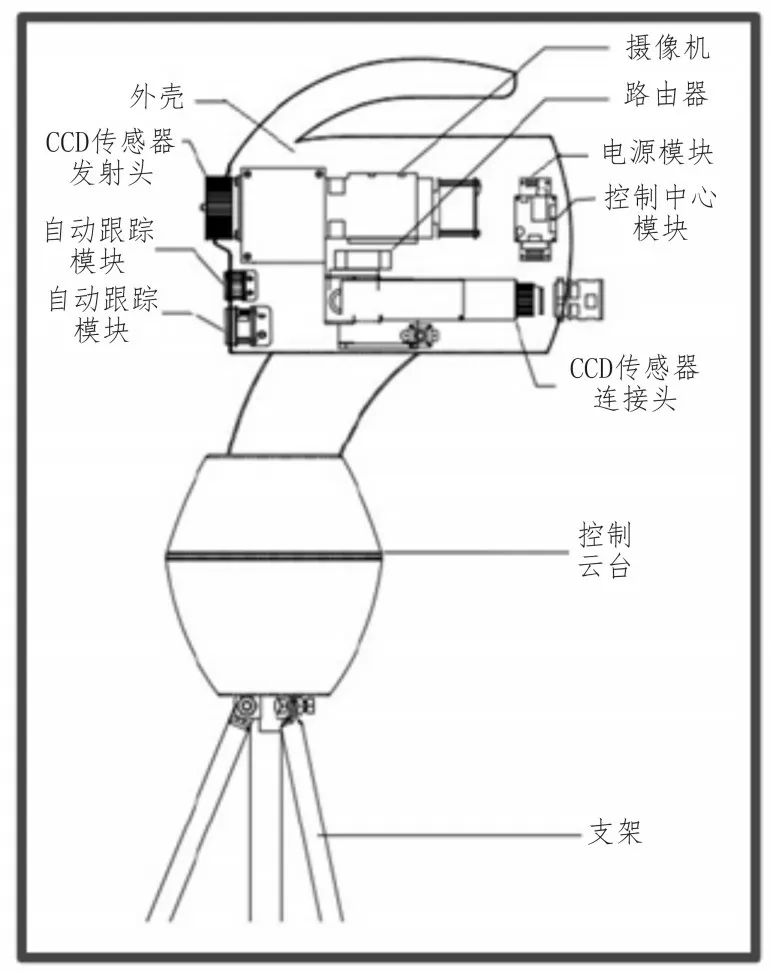
图1 系统硬件结构
如图1 所示,控制中心模块通过通信模块与智能设备通信,智能设备控制和连接摄像机[9]。在CCD传感器清洗系统的同时,摄像机将目标图像传送给智能装置,建立包含目标的视野,在自动跟踪模块收集到数据信息的外来对象后,通过控制中心模块,实现对外来对象的自动跟踪、自动清理功能,达到协同控制[10]。
1.1 CCD传感器
CCD 传感器是一种半导体器件,能够将光学图像转换为信号形式,模拟电荷为载体,可得到真实图像[11-12]。利用信号放大和模数转换技术,将光信号转换成数字信号,便于存储和处理。该传感器具有体积小、功耗低、抗冲击振动、性能稳定、响应速度快等特点。图2 为CCD 设备结构,包括输入、传输和输出3 个部分。
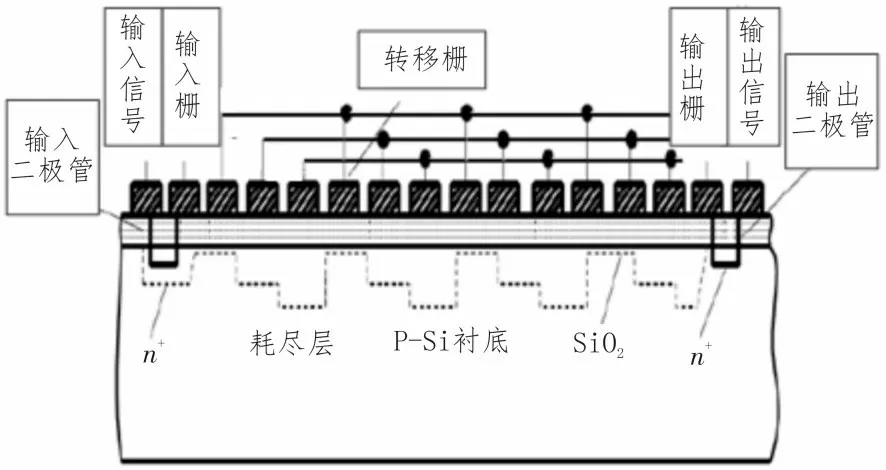
图2 CCD传感器结构
由图2 可知,与以电流或电压为信号的其他设备不同,CCD 以电荷为信号,其基本功能就是储存和传输光或电刺激产生的信号电荷[13-14]。在固定时间内加载脉冲信号,能够通过CCD 定向传输,为电荷产生、储存、传输提供帮助[15]。
1.2 光谱采集子系统
利用CCD 测量物质吸收光谱的基本思想,是根据散射器件波长,在CCD 有效像素上分散单色光。随着CCD 有效像素增加,色散器件色散能力增强,频谱采集系统分辨率提高[16-19]。第一个光源使用了色散器(通常是光栅和其他单色装置),根据不同波长色散位置分散入射单色光。图3 为TCD1208AP 光谱采集子系统。
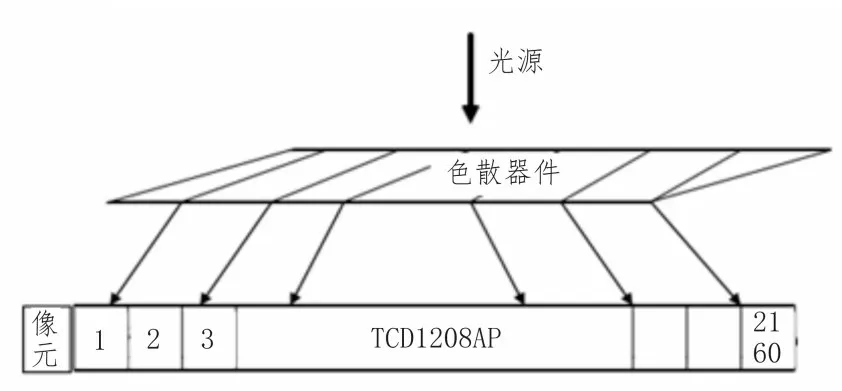
图3 TCD1208AP光谱采集子系统
1.3 LED驱动电路设计
发光二极管驱动电路的主要作用是提供对内窥镜操作的照明,因为内窥镜没有光源,所以无法获取真实图像。为此,设置内窥镜,保证接口上光源成为内窥镜设计的必要照明条件。使用发光二极管,可将电流转换为光能,采用大功率输出方式,可满足光源需求。图4 为LED 驱动电路。
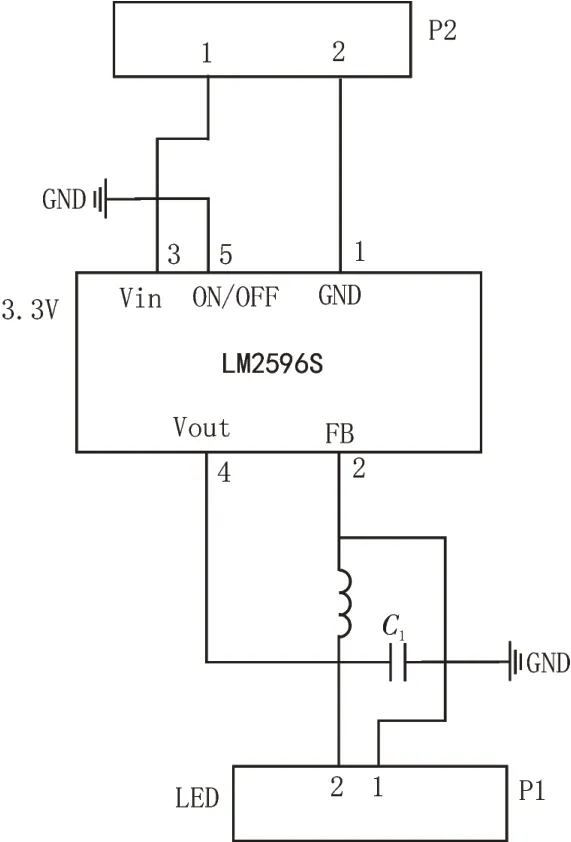
图4 LED驱动电路
因为高功率LED 在工作时会释放出大量的热量,LED 需要焊接在铝基板上,而铝基板需要通过导热润滑脂与热传导器连接来实现导热。发光二极管驱动电路的主要元件为LM2596S 开关稳压器,可稳定输出3 A 驱动电流,线性度好,负载调节特性好。
2 系统软件部分设计
2.1 基于CCD成像电荷分析
摄像机内部由三晶片CCD 捕捉,相机内没有使用彩色滤镜,通过分光棱镜的光信号可以得到红、绿、蓝3 种光。由3 个相同的光束采集的红、绿、蓝3 种光,分别被反射两次,这种收集方法属于完全收集和无损接收。就清晰度和色彩重现而言,它远超单片成像系统,图5 为三晶片CCD 成像原理图。
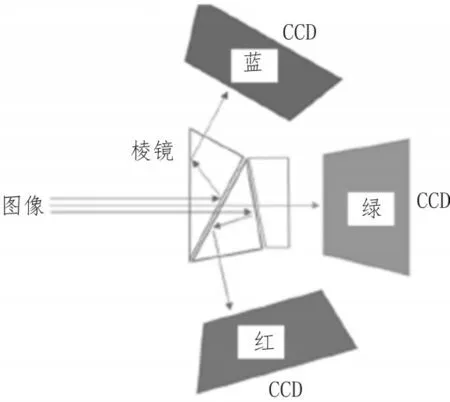
图5 三晶片CCD成像原理
每盘选择1/3 英寸的单色CCD,体积小,适用于便携设备。摄像机电路借助DSP 信号处理芯片,其由3 个单色CCD 连接,通过这3 个单色运算,能够得到彩色输出图像。
输入部分主要负责将光/电注入信号电荷存储到CCD 转移栅中,电荷注入计算公式如式(1)所示:

式(1)中,η表示量子效率;q表示电荷量;Neo表示光子流速;S表示光敏受光面积;tc表示光注入时间。通过改变这些参量,可以将注入的信号依次转移。
2.2 CCD驱动脉冲产生流程
图6 为线阵CCD 驱动脉冲产生流程。
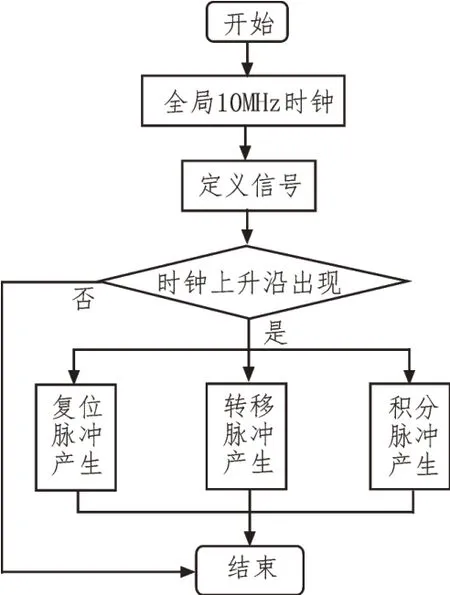
图6 线阵CCD驱动脉冲产生流程
由图6 可知,由CPLD 产生l0 MHz 时钟,根据其产生的脉冲信号,设定寄存器作用域。重新设置1 MHz 脉冲频率,即使CCD 受到整控脉冲频率影响,但传送门脉冲频率也不低于0.5 MHz。线阵CCD的每一个输出像素时间为1 μs,其输出频率与驱动脉冲输出频率始终一致,都是450 Hz。
2.3 清障流程设计
依据上述内容,设置清障流程,如下所示:
step1:使用时先将LHW-3A 便携式CCD 传感器清洗装置放在适当位置,打开设备盒,取出CCD 传感器清洗装置;
step2:上锁前自锁轮,打开电池盒,检查电池电量等参数,保持工作状态,确保没有问题;
step3:将云台侧卧垂直状态从水平位置移至垂直位置,并固定4 个扣子,连接5HDM 数据电缆的遥控器CCD 传感器清洁仪表,与CCD 传感器连接;
step4:打开自动调焦装置,打开急停开关,提示CCD 传感器工作指示灯亮(能听到冷却风扇的声音);
step5:远程控制CCD 感应器,开机或关机时,清洁器显示能力随屏幕闪烁,左有红绿灯,右有信息栏,选择适当的速度,运行云台接近目标方向,观察遥控,调整目标显示;
step6:如果显示对象不太明显,利用CCD 传感器变焦调整按钮可对焦距调整,确定两点为CCD 传感器的切削起点,并作为预置位置;
step7:CCD 感应器的切削速度取决于目标材料,对CCD 传感器的切割,可随意切换CCD 传感器的切割方式;
step8:遇有紧急情况,按紧急停止开关。在消除危险之后,打开紧急停止开关继续工作,直到障碍物被清除。
3 实 验
在Altium Designer summer09PCB 版图下,对基于CCD 成像的便携式光学远程清障系统设计的合理性,进行实验验证分析。
3.1 实验环境
清障仪向地面发射激光烧断树枝,传输室的运营和维护部门为国家电网襄阳供电公司,其利用无人驾驶飞机三维建模实现了数字树障自动检测,发现在110 千伏顺桃线#016-017 线下大约有300 棵树障,如图7 所示。

图7 树枝障碍
离线地形复杂,为提高清障效率,操作者利用激光清障装置远程清除工作人员难以触及的障碍物。
3.2 实验结果与分析
分别使用低功率密度激光清障技术、中等功率密度激光清障技术、高等功率密度激光清障技术和基于CCD 成像清障技术,对清障效果对比分析,结果如图8 所示。
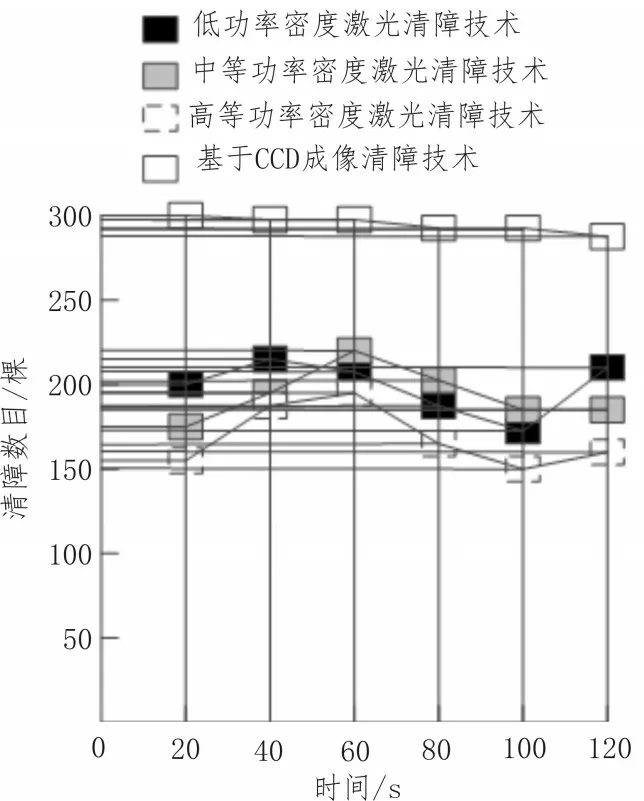
图8 不同技术清障效果对比分析
由图8 可知,使用低功率密度激光清障技术、中等功率密度激光清障技术、高等功率密度激光清障技术随着时间增加,清障数目不同,但都无法达到300 棵故障电线都被清除的预期效果。而使用基于CCD 成像清障技术可达到300 棵树障都被清除的预期目的,由此可知,使用该系统具有良好的清障效果。
4 结束语
该文设计的基于CCD 成像的便携式光学远程清障系统,可对光波段光谱分析,并保证光信号顺利注入转移栅中。由实验结果可知,所设计的系统具有高效清障效果。
受时间和条件的限制,对光谱采集系统的设计原则仅作了初步探讨,取得的效果与实际应用尚有一定差距。为使便携式清障系统在实际中得到应用,认为有以下几个方面需要改进:
1)通过使用现在流行的光纤探针,将单色光引入光谱系统,设计了一套完整的光谱曲线测量系统。
2)微处理器具有可定制的操作系统,这个系列处理器属于ARMCortex-M3 系列,它是一个单片机和嵌入式处理器,无需PC 上的软件就可以实现更为精确的光谱曲线绘制。
3)采用16 比特、24 比特等高转换比特的模数转换设备,可提高光谱数据转换精度,减少数据量化误差。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
建筑施工(2022年3期)2022-07-18 11:25:46
数学物理学报(2022年3期)2022-05-25 13:33:28
交通企业管理(2020年6期)2020-11-11 07:31:00
中成药(2017年12期)2018-01-19 02:06:54
中国交通信息化(2017年5期)2017-06-06 07:20:11
电机与控制应用(2015年7期)2015-03-01 03:50:14
电子设计工程(2015年12期)2015-02-27 12:06:18
上海金属(2013年6期)2013-12-20 07:58:07
汽车与新动力(2013年4期)2013-03-11 16:08:09