目标检测在电力巡检中的应用与发展趋势
2021-10-09 01:20张兆云何冠锋黄世鸿
湖北民族大学学报(自然科学版) 2021年3期
张兆云,何冠锋,黄世鸿,张 志
(东莞理工学院 电子工程与智能化学院,广东 东莞 523808)
架空线路巡检是保障电力输送的重要方式,根据《国家电网公司架空输电线路运维管理规定(国网(运检/4)305—2014)》,国家电网的架空线路巡检的电力部件包括:基础、绝缘子、金具、接地装置、杆塔、导地线、通道环境、附属设施共八大类[1].由于我国国土幅员辽阔,架空线路巡检长期面临着地形起伏大、线路分布广、自然环境条件恶劣等因素,传统巡检方式存在劳动强度大、巡检效率低的不足,甚至在某些地势复杂地区无法进行巡检[2].为此,近年来电网大规模引入无人机巡检[3]、机器人巡检[4]、直升机巡检[5]等新技术对电力设备进行故障巡检,并积极开展电力巡检新技术的研发工作[6].随着新一代巡检方式的普及,极大地降低了野外巡检的难度,产生了海量的可视化数据[7].但是面对大量的巡检图像和视频,使用人工肉眼的方式对巡检影像进行检测,极大地增加了工作人员的负担,且效率十分低下.于是有学者开始研究自动识别并标注巡检航拍图像中的关键电力部件或特定故障.自Krizhevsky[8]在ImageNet[9]中的优异表现,掀起深度学习的热潮,也带动了计算机视觉技术的发展.不同于传统目标检测方法以人工特征提取的方式,深度学习的目标检测算法以数据为驱动,具有检测精度高、检测目标多、鲁棒性强等特点[10].目标检测是计算机视觉的重要分支,传统的目标检测算法性能已经到了瓶颈[11],很难有更大的提升,难以满足电网公司对目标检测效果的要求.随着深度学习在图像分类任务上取得巨大成功,基于深度学习的检测算法开始成为主流.本文参考并展示目标检测在电力应用的阶段性研究成果,首先通过介绍基于传统特征提取的目标检测和基于深度学习的目标检测及它们在电力巡检方面的应用;其次从目标检测应用在电力领域的趋势出发,依次对网络轻量化(轻量级网络结构、模型压缩、移动端深度学习框架)、巡检影像数据集(数据标记、数据样本不平衡、多源数据)、检测方法(小目标检测、图像测距、检测算法)等方面进行重点阐述.
1 基于传统特征提取的目标检测
传统的目标检测算法,多是基于窗口滑动的方式,即设定一个窗口在检测的图像上进行滑动依次选取感兴趣的区域.分别对滑动的每个窗口进行特征提取,最后对提取的特征利用AdaBoost回归、梯度提升回归、K近邻回归、随机森林、支持向量回归等分类器进行分类.缪希仁等[2]对国内外近10年公开发表的论文进行统计,目前在电力巡检图像检测领域中,占主流地位的仍是基于人工设计特征提取的机器学习图像目标检测方法.
1.1 SIFT系列
尺度不变特征变换(scale-invariant feature transform,SIFT)[12]是计算机视觉领域中检测和描述图像中局部特征的算法.张红民等[13]采用选择性搜索(selective search,SS)[14]算法从巡检图像提取候选区域,接着使用SIFT算法对候选区域的绝缘子进行特征提取,取得较高的准确率.何春光[15]提出改进的SIFT算法对输电线路上的异物故障进行检测,解决了传统匹配算法需建立高斯金字塔模型的极值点无法计算的问题.吴婕萍等[16]以SIFT算法为基础对输电线路进行异物检测,利用高斯滤波对图像进行预处理,再提取图像的尺度不变换特征,最后采用基于梯度直方图的统计方法对所提取特征进行识别,取得92%的检测精度.
SIFT-PCA在SIFT的基础上,将统计学中的主成分分析(principal component analysis,PCA)[17]应用于对描述子向量的降维,以提高匹配速度.Wang等[18]首先对巡检图像进行各种降噪和锐化预处理,其次使用SIFT算法进行特征提取,接着使用PCA算法进行降维,最后使用支持向量机进行分类.
加速健壮特征(speeded up robust feature,SURF)[19]提出了一种尺度和旋转不变的检测子和描述子,是SIFT算法的加强版.SURF最大的亮点就是采用了harr特征以及积分图像的概念,显著的提高算法的效率.李寒等[20]采用SURF算法对红外图像进行特征提取,对比使用SIFT算法,无论是在程序运行时间,还是在检测精度上,SURF都要优于SIFT.
Luo等[21]采用K近邻算法(K-nearest neighbor,KNN)和随机取样一致算法(random sample consensus,RANSAC)对SIFT、PCA-SIFT、SURF 3种算法的检测效果进行对比分析.实验结果表明SIFT在大多数情况下表现出它的稳定性,尽管它很缓慢的.SURF是最快的,并且性能达到与SIFT同样出色.PCA-SIFT则在旋转和光照变化方面表现出优势.
1.2 HOG
方向梯度直方图(histogram of oriented gradient,HOG)特征是一种经典的图像特征提取方法,它通过计算和统计图像局部区域的梯度方向直方图来构成特征[22].HOG特征结合支持向量机(support vector machine,SVM)分类器已经被广泛应用于工业界中,腾云等[23]针对高压隔离开关分合闸不到位的问题,提出了一种基于HOG和支持向量机的隔离开关异常状态搜索识别算法,实验结果表明,该算法能够准确地识别出分合闸不到位的高压隔离开关图像.
1.3 LBP
局部二值模式(local binary patter,LBP)是一种用来描述图像局部纹理特征的描述子,提供了一种衡量像素间邻域关系的特征模式,因此可以有效地提取图像的局部特征,而且由于其计算简单,可用于基于纹理分类的实时应用场景[24].乔林等[25]采用LBP算法对绝缘子、变压器和断路器3种典型电力设备的图像局部进行纹理提取,实验结果表明提出方法取得了比现有方法更好的有效性和稳健性.王夏夏[26]针对输电杆塔的识别与跟踪问题,利用对光照变化等造成的图像灰度变化具有较强鲁棒性的LBP特征对电力铁塔、钢管杆塔和钢筋混凝土杆塔3种不同材质的输电杆塔进行特征提取.
1.4 DPM
可变型部件模型(deformable parts models,DPM)算法由Felzenszwalb等[27]提出一种基于部件的检测方法,对目标的形变具有很强的鲁棒性.吴亮等[28]针对电力领域高质量标记数据不足的情况,提出了一种虚拟电力场景的搭建及相应的数据和标记的快速生成方法,以防振锤作为主要对象的虚拟数据集,对3种不同的目标检测方法得出结果的比较,得出DPM在该数据集上训练后,能够在真实数据集取得了最好结果的结论.
1.5 基于传统特征提取的目标检测算法对比
SIFT系列算法有SIFT和基于SIFT改进的SIFT-PCA、SURF算法,基于SIFT关键点检测可以有效降低背景干扰、凸显电力设备的细节,特征提取能力强.HOG算法由于其对图像几何和光学的形变具有不变性,在复杂的电力巡检环境中可以有效地提取设备的特征.LBP算法虽然可以有效利用图像像素间的领域关系获得图像的空间信息,但是在复杂电力巡检环境中受光照的影响较大.DPM运算速度快、适应检测目标的变形,算法直观易懂,但是激励特征需要人工设计,工作量极大.表1为传统特征提取的目标检测算法比较.
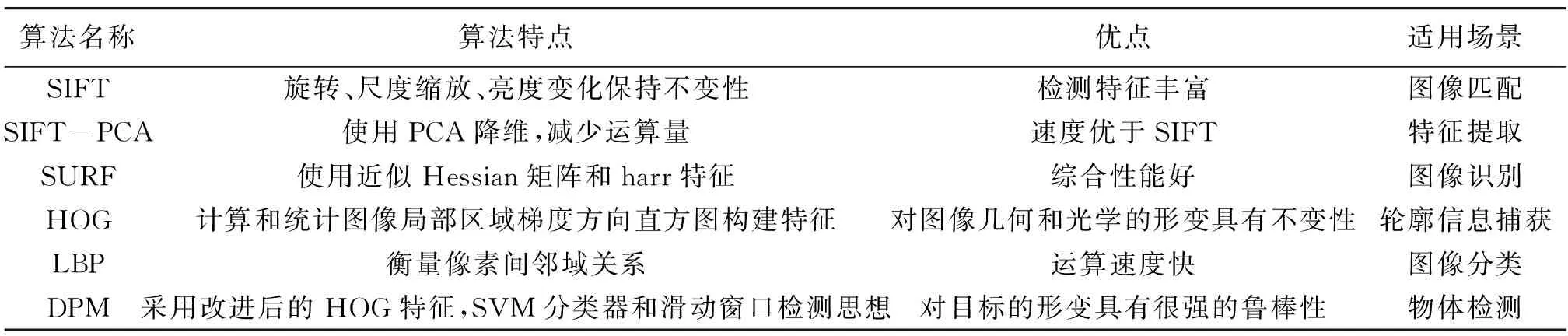
表1 基于传统特征提取的目标检测算法对比Tab.1 Comparison of target detection algorithms based on traditional feature extraction
2 基于深度学习的目标检测
目前,对于电力巡检影像数据的分析和处理主要通过网络传输方式将所有巡检数据上传至后端服务器,利用服务器强大的计算能力对影像数据进行存储和分析,通过目标检测对视觉影像进行识别和状态感知[29].由于基于深度学习的目标检测算法在性能、实用性、普适性上都要优于传统的目标检测算法.因此,在电力领域中检测中用到的基于深度学习的目标检测算法主要有R-CNN系列、YOLO系列和SSD系列.
2.1 R-CNN系列
RCNN系列主要有R-CNN、Fast R-CNN和Faster R-CNN,其中Faster R-CNN是现在电力系统图像识别常用的模型框架,许多应用在电力故障检测的算法是通过改进Faster R-CNN得到的.R-CNN[30]在一定程度上改变目标检测领域的研究思路,之后改进的R-CNN系列也是该领域的最高水准.与传统的滑动窗口获取候选区域不同,R-CNN采用选择性搜索获取候选区域,之后在这些候选区域采用CNN提取特征,进行预测.由于R-CNN结构中的全连接层对输入图像的尺寸有限制,不符合尺寸要求的候选区域都必须经过剪切或者变形处理,这会丢失原始图像的部分信息.
针对R-CNN存在着候选区域的缩放问题和特征提取的重复计算问题,He等[31]提出SSP-Net模型.与R-CNN的区别在于对一张图像只做一次特征提取,且在将卷积层和全连接层之间加入空间金字塔池化层,在保证性能的同时,检测速度也有所提升.然而,SSP-Net没能有效解决R-CNN训练速度慢,训练空间开销大等问题.因此,R-CNN原作者Ross Girshick提出Fast R-CNN[32],将SSP-Net的空间金字塔池化层改为ROI(region of interest),并且引入了多任务损失函数,这些创新使得检测的速度显著提升.Fast R-CNN从优化特征提取的角度出发,并没有解决选择性搜索速度慢的问题.因此,任少卿等又提出了Faster R-CNN,其中最大的亮点就是设计了RPN(region proposal networks)代替SS,RPN使 Faster R-CNN 能够同时完成候选区域、特征提取,实现目标检测端到端的训练,进而大幅提高网络的检测速度.
由于R-CNN通过使用CNN从图像中提取可能含有目标的区域来检测并识别目标,但是计算复杂,难以满足识别海量电力巡检图片的需求,而Fast R-CNN和Faster RCNN利用CNN网络提取图像特征后接一个区域提议层,优化了提取可能含有目标区域的方式并改进识别目标的分类器,使目标的检测和识别几乎实时[33].故在电力巡检中大多数采用Faster R-CNN作为检测算法.万吉林等[34]使用Faster R-CNN和U-Net[35]实现变电站指针式仪表的表盘和指针指数的自动识别,使用Faster R-CNN检测仪表图像中的表盘、指针所在区域,实验结果表明在指针式仪表图像读数识别上的错检率和漏检率要明显低于传统机器学习算法.刘召等[36]提出一种基于改进的Faster R-CNN高压线缆目标检测方法,通过引入跳转连接并调整激活层和卷积层的顺序、对候选框的产生机制进行改进,提高了网络获取图像高级特征的能力;通过感兴趣区域池化(region of interest pooling,ROI)池化层提取每个区域的特征,取得了较高的精度和较快的速度.史晋涛等人[37]针对训练本少问题,提出基于样本扩充的Faster R-CNN电网异物监测算法,将隐患目标与背景图像按照一定规则进行融合,达到批量扩充样本集的目的.使用该算法生成的样本进行测试,测试结果表明扩充后的训练集可以使系统性能得到一定提升.
2.2 YOLO系列
从R-CNN、Fast R-CNN再到Faster R-CNN,目标检测一直沿着先筛选候选区域再分类的研究思路,导致训练模型大,检测速度慢等问题一直存在.于是有学者提出将目标检测转移到回归问题上,尽可能保持精度的同时简化网络模型,提高检测速度.YOLO系列的出现,在一定程度上解决了R-CNN系列的低效问题.YOLO的特点是检测速度快、模型体积小,适合部署在无人机挂载的嵌入式设备上,因此在电力领域中经常用于巡检中的实时检测.
2014年11月,辽南地区首个医疗联盟——大连医科大学附属二院医疗联盟(简称“联盟”)正式成立,成为三级医院牵头,包括庄河市中心医院、普兰店市中心医院、大石桥市中心医院等14个成员单位,贯穿二级医院和基层医疗机构,横向覆盖疑难重症治疗、急诊急救、居民健康管理的多维度、三级联动区域医联体,意在以信息化为支撑,强化联盟单位间远程会诊和双向转诊、医师多点执业和新农合实时报销等功能。
Redmon[38]将目标检测视作回归任务、将特征提取、识别与定位统一在一个卷积网络中.因此,YOLO检测速度快,在Titan X GPU下能有45 FPS的表现,此外Fast YOLO更是达到了155 FPS的水准.虽然YOLO的检测速度可以达到实时检测的目标,另外在检测精度也优于其他同期的实时目标检测算法,但是在检测精度上还是不如R-CNN的.于是,YOLO原作者Redmon等人在基于YOLO的基础上提出了YOLOv2[39].YOLOv2以DarkNet-19[40]为骨干网络,在保持YOLO检测速度的同时引入了批归一化(batch normalization)和多尺度训练、采用先验框(anchor boxes)并用K-Means聚类提取先验框的尺度、使用高分辨率图像训练分类网络等一系列的优化策略和改进方法[41].然而,由于YOLOv2对于小目标的检测不敏感,Redmon等人又提出了基于YOLOv2改进的YOLOv3,YOLOv3借鉴残差网络的思想,使用了更深的DarkNet-53作为骨干网络,加入了多尺度预测,使用sigmoid+交叉熵函数以支持多标签预测[42].Bochkovskiy等[43]提出YOLOv4.不同以往YOLO系列,YOLOv4没有以提高检测精度和速度为目标,更多是从工业应用的角度出发.Alexey不仅分析验证了Bag-of-Freebies和Bag-of-Specials方法对检测框架训练和推理的影响,还总结了多种先进的检测技巧,这些工作使得YOLOv4的训练门槛大大降低[44].
由于电力场景下部署的大多数智能监控设备为低端嵌入式芯片,使得监控设备的算力小,功耗低且内存余量仅200 M,又电网对输电线路检测的准确率、误报率和漏检率有较高要求.YOLO由于模型小、所需计算资源不高,易于部署在嵌入式设备上,故在电力场景中边缘节点摄像机实时采集图像、端侧节点模型实时检测安全隐患有大量应用.肖新帅等[45]介绍了YOLOv1、YOLOv2算法,使用绝缘子数据集进行试验并对检测结果进行了对比,实验结果表明YOLOv1和YOLOv2能够完成对绝缘子的识别和定位,满足实时电力巡检的需要.黄虎等[46]提出一种基于YOLOv3算法的安全帽佩戴检测方法,通过构建作业人员检测与安全帽检测的级联网络,将级联网络检测到的候选边框进行安全帽区域预估,最后将安全帽预估区域输入至安全帽检测网络中,自动监测作业人员是否正确佩戴安全帽,保证变电站内安全作业.王永平等[47]针对高压开关设备红外图像异常发热点检测中存在目标位置场景复杂和大小不均衡带来的检测准确率下降问题,提出基于YOLOv3的目标检测算法,通过添加卷积模块及调整部分超参数对其基础网络架构进行优化,实现高压开关设备异常发热点的快速检测、识别和定位.陈咏秋等[48]为解决传统驱鸟器启停策略的弊端,提出基于YOLOv3算法的输电线路鸟类检测模型,通过使用残差模块提取图像的深层次特征,采用多尺度目标检测策略使模型在雨天、雾天、抖动情况下具有较强鲁棒性,保障输电线路的安全、稳定运行.
2.3 SSD系列
作为双阶段算法的代表RCNN系列在精度和速度的权衡上侧重于精度,导致检测速度较慢.作为单阶段算法的代表YOLO则侧重于速度,以至于精度不高.SSD系列在保证高精度检测的同时也兼顾检测速度,为了提升小目标的检测效果使用了多尺度的特征进行同时检测.由于电力巡检中存在(如防震锤,鸟窝)小尺寸目标,所以在电力场景中使用SSD算法针对小目标进行检测.
Liu等[49]提出了SSD(single shot multiBox detector)网络,SSD网络既采取了单阶段的思想以提高网络的检测速度,又融入了Faster R-CNN的锚框思想,并且做了特征分层提取并依次计算边框回归和分类操作,由此可以适应多种尺度目标的训练和检测任务.SSD的出现推动了实时高精度目标检测的发展.然而,SSD算法的浅层特征图的表征能力并不强,因此对小目标检测不敏感.为了提高SSD小目标的检测效果,相关学者开始研究如何改进SSD算法.Fu等[50]提出DSSD网络,通过把SSD的骨干网路改为ResNet-101[51]提高浅层特征图的表征能力,并在SSD中添加反卷积层提高了对小目标的敏感度.Cui等[52]提出了MDSSD网络,将具有丰富的语义特征的高层特征图通过反卷积扩大尺寸后,再与低层的特征图融合后进行预测.Li等[53]则借鉴FPN[54]思想,采用了一种新颖的、轻量级的特征融合模块,将浅层的细节特征和高层的语义特征结合起来生成新的特征金字塔进行预测.
标准的SSD算法使用多尺度的特征进行同时检测以提升小目标的检测效果,但没有对多尺度的特征进行融合,导致在实际小目标检测中并不能达到很好的性能.因此SSD在电力巡检场景中,根据检测的目标和存在的问题,相应的改进SSD算法,可以得比原算法更好的检测效果.祁婕等[55]针对输电线路鸟窝巡检问题,提出一种基于SSD算法改进的实时检测算法,并在SSD的网络结构基础上将前置网络VGG-Net[56]替换为ResNet-101,提高其特征提取能力;更改损失函数以改善SSD算法中样本不平衡的问题;利用数据增广提高数据多样性以提高模型的鲁棒性,实验结果表明本文所提出的方法检测精度对比原SSD算法在准确度和召回率上分别有3.17%和6.35%的提升.
毛先胤等[57]提出基于SSD算法改进的识别电力线障碍物,通过在卷积层改善批次归一化层,在有效减少机器人巡检过程中光照和尺度变化带来的影响的同时避免了梯度消失和加快了网络收敛速度.吴庭栋等[58]针对深度学习目标检测算法移植到嵌入式平台上精度与速度不均衡的问题,提出一种基于改进SSD算法的架空线路关键部件实时检测算法,取得了较高的检测精度和实时的检测速度.戚银城等[59]为解决航拍图像金具智能检测问题,提出一种基于改进SSD模型的输电线路航拍巡检图像金具目标检测方法,通过改变IoU(intersection over union)的值得到对目标尺度更敏感的默认框以及在模型中加入对密集目标检测有效的斥力损失,提高了模型对密集遮挡金具检测的准确率.
2.4 基于深度学习的目标检测算法对比
RCNN系列、YOLO系列和SSD 3种算法各有特点,RPN让Faster R-CNN的精度高于YOLO和SSD,但在速度上却不及YOLO和SSD.YOLO将目标检测问题由分类转化成回归问题,通过回归机制和区域生成的提取机制,在检测速度上达到了实时的要求.SSD则像是RCNN和YOLO的综合体,通过借鉴YOLO的回归机制和RCNN的锚框机制,在速度和精度取得了一个很好的平衡.表2为各种基于传统特征提取的目标检测算法比较.

表2 基于深度学习的目标检测算法对比Tab.2.Comparison of target detection algorithms based on deep learning
3 目标检测在电力巡检的主要发展趋势
从现有文献来看,基于深度学习的目标检测算法在检测准确率和应用普适性上都优于传统的目标检测算法,但是在电力线检测图像分析中采用深度学习仍处于起步阶段,还面临较多的挑战,也存在很多潜在的机遇.
3.1 数据集
3.1.1 数据标记 深度学习能够实现的前提是基于大量经过标注的数据.在电力领域,数据集的标记还需要相关专业人员花费大量的时间与精力进行标注.Nguyen等[60]通过手工标记图像从头创建一个带有54个类的30 000 张图像创建了一个中型的电力巡检数据集.平均标记速度是每小时40张图片.虽然有一些方法可以减少对数据的依赖,比如迁移学习、少样本学习、无监督学习和弱监督学习.但是到目前为止,它们的性能还没法与监督学习相比.图1为标记电力巡检图像数据建立数据集的示意图.
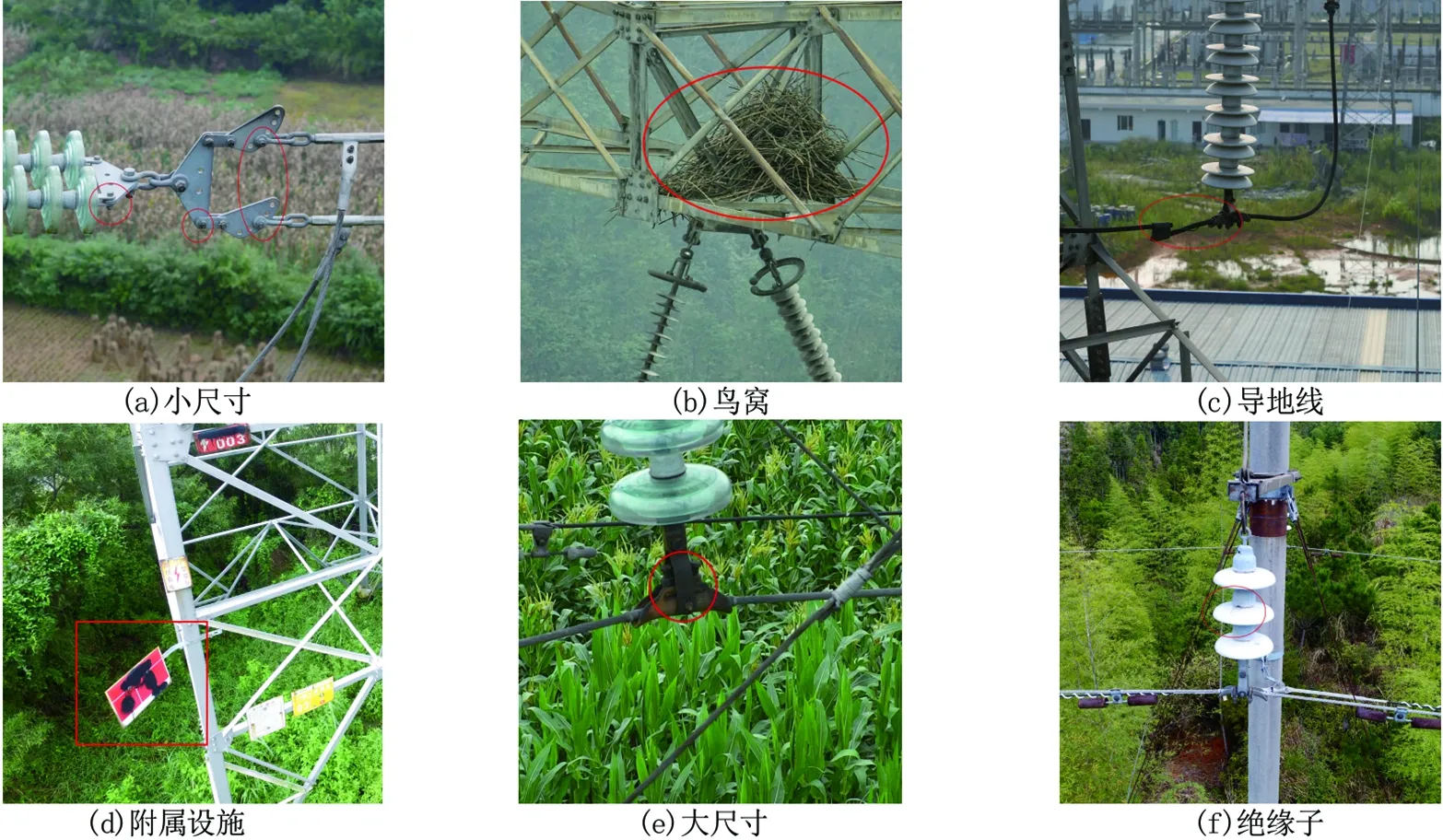
图1 电力线常见故障的样本Fig.1 Samples of the common fault in power lines
3.1.2 数据样本不平衡 由于架空线路中不同的部件数量不尽相同,且发生的故障频率也不同.这就容易导致数据集中各个类别的样本数量极不均衡.样本不平衡会使得分类模型存在很严重的偏向性.样本不平衡通常会使深度学习模型偏向具有更多样本的类,而忽略具有较少样本的类.为了解决样本不平衡问题,Liu等[61]提出一种自动生成图像的方式,所需样本通过分割网络提取(如Mask R-CNN,U-Net等),然后将对象区域粘贴到背景图像上.更进一步,可以将粘贴后的图像通过对抗生成网络产生更加符合实际环境的新图像.
3.1.3 多源数据 在电力巡检中,除可见光外还有红外、紫外、激光雷达等巡检手段,不同数据源的图像适用于检测不同的缺陷,多源数据融合应用可以有效扩展检测系统的缺陷检测范围[1].为了充分利用多数据源的优势,可以采用多模态目标检测技术.目的是融合来自不同模式的信息,以实现更具判别性的检测方法.然而,基于多模态数据的部件或故障检测还处于起步阶段.图2为多源数据融合过程的示意图.

图2 多源数据融合Fig.2 Multi-source data fusion
3.2 边缘计算以及模型轻量化
边缘计算因具有靠近数据源、实时性好、时延低、响应快等特点,成为物联网发展的核心技术之一,是当前智能电网发展的一个重点方向.每个边缘可以对数据进行收集和分析,创建大量的数据.边缘计算带来的转型机会几乎是无限的.自动化、预测和控制等功能的实时分析能力意味着更高的敏捷性和效率.边缘计算在输电领域的应用主要体现在对输电线路状态的监测及线路安全检修管控.巡检影像数据具有体量大、增长快、价值密度低的典型大数据特征,将边缘计算装置挂载到无人机上,通过边缘计算装置中的训练好的轻量化深度学习模型进行实时地缺陷检测,从而缩短输电线路巡检的周期.边缘计算是一种新兴的计算模式,在海量数据的实时处理方面展现出天然的长处.基于边缘计算的图像识别技术能够为当前电力巡检产生的海量数据,提供一种新的解决思路,极大地提高电力系统运维管理效率,具有广阔的研究前景和应用价值.如何在计算资源有限的嵌入式设备上实现既有高精度和低延迟的目标检测功能[62],这对建设实时自动化电力巡检十分重要.在可接受的性能下,小模型相比大模型,具有很多优势:一是更高效的分布式训练,小模型参数小,网络通信量减少;二是便于模型更新,模型小,客户端程序容易更新;三是利于部署在特定硬件如FPG.
为了实现图像检测的边缘计算和轻量化计算,主要有轻量级网络模型、模型压缩和轻量型深度学习框架三个方向.
3.2.1 轻量级网络结构 2017年,Google针对嵌入式设备提出的一种轻量级的深层神经网络—MobileNet.MobileNet具有体积小,计算量少的特点,背后的思想是用深度可分离卷积[63]代替标准的卷积(如Light-Head R-CNN[64]改进Faster R-CNN的head部分),并使用宽度因子(width multiply)减少参数量.深度可分离卷积极大地降低了深度学习网络的计算量,实现模型的轻量化.王健[65]提出了一种基于MobileNet和SSD相结合的轻量型目标检测方法,并将其部署在嵌入式设备上实现电力设备的自动识别.王彦博等[66]提出一种基于嵌入式设备的高效卷积神经网络用于电力设备热故障检测,将SSD算法中的骨干网络替换为MobileNet,同时BN(batch normalization)与前一卷积层合并,以减少模型参数、提升推理速度,将其部署在轻量级计算平台上运行.马富齐等[67]提出了一种基于轻量型多感受野特征表达网络的输电线路覆冰厚度终端级辨识方法,以MobileNet为骨干网络,结合多尺度的目标检测网络SSD实现覆冰厚度的辨识与监测,实现了极端天气下覆冰监测的边缘智能自治,具有很强的泛化能力和实际适用价值.
3.2.2 模型压缩 CNN模型替代了传统人工设计特征和分类器,不仅提供了一种端到端的处理方法,不断逼近计算机视觉任务的精度极限的同时,其深度和尺寸也在成倍增长.学术界不仅在设计轻量化模型(前面提到的MobileNet、ShuffleNet系列),也在不断实践如何进一步压缩模型,在便携式终端设备实现准确率、计算速率、设备功耗、内存占用的小型化.CNN模型压缩沿着深度压缩的思路,压缩算法可分为四类:网络修剪、低秩分解、网络量化和知识蒸馏[68].网络修剪提高了网络参数的稀疏性,删除模型参数中冗余和不重要的部分.低秩分解使用矩阵或张量分解以估计深层CNN中最具信息量的参数.网络量化设计了特殊结构的卷积滤波器以减少存储和计算的复杂度.知识蒸馏将一个训练好的大型CNN模型迁移至紧凑模型中.赵航航等[69]针对输电线路巡检图像需要巨量计算复杂度和对设备性能的高要求,提出一种加速与压缩算法,实验结果表明:减少测试模型约18%的计算量和80%的模型尺寸.图3为模型压缩示意图.
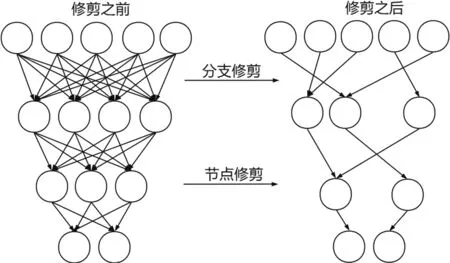
图3 模型压缩Fig.3 Model compression
3.2.3 轻量型深度学习框架 在轻量化的深度学习框架方面,Google于2017年提出TensorFlow Lite框架,Tensorflow Lite是针对于移动和嵌入式设备的轻量级深度学习框架[70].Facebook则于2018年发布了一款全新的开源深度学习框架Caffe2.据官方介绍:这是一个轻量化和模块化的深度学习框架,在强调轻便性的同时也保持了可扩展性和计算性能[71].随后,PyTorch框架也宣布开始支持边缘端的深度学习模型.Zhang等[72]对TensorFlow Lite、Caffe2和PyTorch框架进行性能比较,研究结果表明没有一种框架的综合性能表现突出、适用于边缘计算装置的深度学习框架.
3.3 识别算法优化以及难点
科技创新是高质量发展的强大动能,当前各种基于深度学习的各种新颖的算法和技术层出不穷,其中有不少适用于电力巡检领域的算法和技术.基于深度学习的目标检测应用在电力巡检领域,不管在检测精度还是检测速度上,都要优于人工设计特征的机器学习的方法,但仍然面临这一些问题.
3.3.1 小目标检测 架空线路巡检检测图像中有许多电力小部件,如通道、导地线等,然而大多数目标检测算法(如R-CNN、YOLO、SSD等)在检测小目标的表现较差.在训练过程中,高分辨率的图像被调整到一个更小的分辨率,从而使许多特征消失.此外,神经网络中的池化和下采样操作使这一问题更加严重.如何提高巡检中小目标的检测能力是一个挑战.
3.3.2 图像测距 图像测距是使用图像处理方法进行架空线路缺陷检测的一项关键技术,主要针对电力巡检中的限距类缺陷,如导线与周围树木、建筑物的安全距离不足等[2].目前图像测距在精度以及算法的可靠性还需进一步的研究,在电力巡检中也只是处于测试阶段,尚未有正式的应用.
3.3.3 检测算法迭代优化 近年来,电力设备图像的研究逐渐向深度学习方面倾斜,所用的算法大多为Fast R-CNN、YOLO、SSD或基于上述算法改进的模型.但这并不代表在深度学习崛起之前不断发展进步的传统计算机视觉技术被淘汰.将传统目标检测算法与深度学习结合已经在很多新兴领域流行起来,如深度学习模型尚未得到充分优化的全视野、3D视觉领域[73].
4 结语
本文综述了基于深度学习的目标检测算法在电力设备识别和故障检测中的应用以及发展趋势,从目标检测的方法出发,分别详细阐述了应用在当前电力领域的几种常用的算法.从目前的研究来看,在电力巡检领域占主流地位的仍是基于机器学习的传统目标检测方法,有部分学者将深度学习技术应用到电力巡检领域中,实验结果表明在性能和普适性上都要优于传统的目标检测算法,但是制约深度学习技术在电力巡检发展的因素有数据集、轻量化、计算量等因素,距离深度学习在电力巡检的广泛应用还有一段路要走.
猜你喜欢
中学生数理化·中考版(2022年9期)2022-10-25
快乐学习报·教育周刊(2022年16期)2022-05-01
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化·七年级数学人教版(2020年11期)2020-12-14
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
当代陕西(2019年10期)2019-06-03
福建基础教育研究(2019年6期)2019-05-28
电子制作(2018年19期)2018-11-14