多波束测深系统在海上风电场测量中的应用
2021-10-09 09:53刘新华吴猛
南方能源建设 2021年3期
刘新华,吴猛
(1.中国能源建设集团广东省电力设计研究院有限公司,广州510663;2.广东科诺勘测工程有限公司,广州510663)
广东作为海洋大省,广东省政府已把发展海上风电作为可再生资源开发利用的重要方向[1-2]。随着人类对海洋资源和环境开发研究活动的不断增多,人们对了解海底地形地貌的要求日益提高。如何去获取更加详细的海底地形地貌信息成了海上风电场测量中最重要的工作[3-5]。
传统的水下地形测量方法(如测深杆法、测深锤法、回声测深仪法、RTK测量)只能简单获取水深信息,对水下地形信息却无能为力。单波束测深系统在一定程度上解决了水下地形测量问题,但在测量效率和精度上有较大的局限性,无法满足当今的需求。近年来,多波束测深系统在海洋测量中逐渐受到高度重视,国内外许多学者对此进行了深入研究,取得了一批显著成果。随着多波束测深系统应用范围的不断深入和扩展,其全覆盖式测量、高效率、高密度采集、高分辨率和成果信息丰富[6]等特点被越来越多的同行所认同,应用也越来越广泛。特别是在进行大面积的海上风电场海底地形测绘中具有极高的应用价值。我院作为国内唯一获得海洋工程勘察全部三个专业的甲级资质的电力行业设计企业,拥有精良的海洋勘察设备和专业的技术服务团队,截止2020年底,我院勘察团队已完成30多个海上风电场项目勘察,勘察面积约1 500 km2,积累了丰富的海上风电勘察经验和技术。
本文以广东某一海上浮式风电装备研制项目为案例,详细介绍了多波束测深系统在该项目的实施过程,对最终的测量成果进行精度分析,结果表明多波束测深系统在海上风电场地形测量中精度和效率更高,三维展示成果更加直观。
1 多波束测深系统的工作原理和组成
1.1 工作原理
多波束测深系统的工作原理是利用发射换能器阵列向海底发射宽扇区覆盖的声波,接收换能器接收窄波束,通过发射、接收扇区指向的正交性形成对海底地形的照射脚印,对这些脚印进行恰当的处理,一次探测就能给出与航向垂直的垂面上百个甚至更多的海底被测点的水深值[7],从而能够精确、快速地测出沿航线一定宽度内水下目标的大小、形状和高低变化,比较可靠地绘出海底地形的三维特征[8-9]。
1.2 Reson SeaBat T50-P系统组成
SeaBat T50-P多波束测深系统是由丹麦RESON公司研制的一款便携式多波束测深系统,具有大扫宽角度、波束数量多、工作频率范围大、测深分辨率高、高度集成、安装便捷及作用方便等特点。系统主要由多波束声学系统、数据采集系统、数据处理系统、外围辅助设备和成果输出系统组成。主要的设备包括:换能器及处理单元、POSMV惯导系统、声速剖面仪、数据存储设备、数据采集和处理软件,系统主要设备见图1。
Reson SeaBat T50-P多波束测深系统技术参数见表1。
2 工程实例
2.1 项目概况
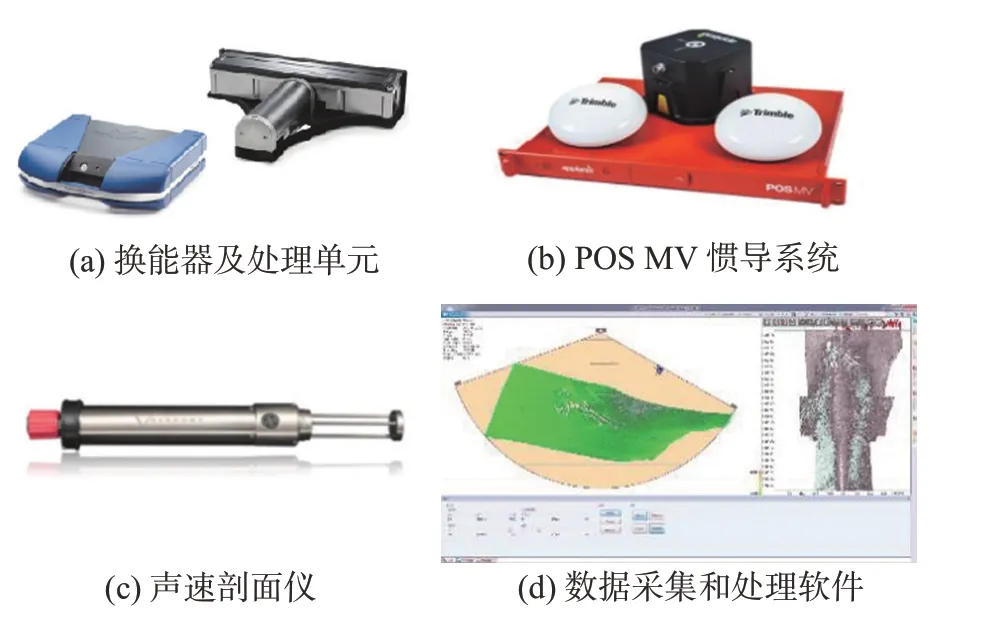
图1 SeaBat T50-P系统组成Fig.1 SeaBat T50-P system components
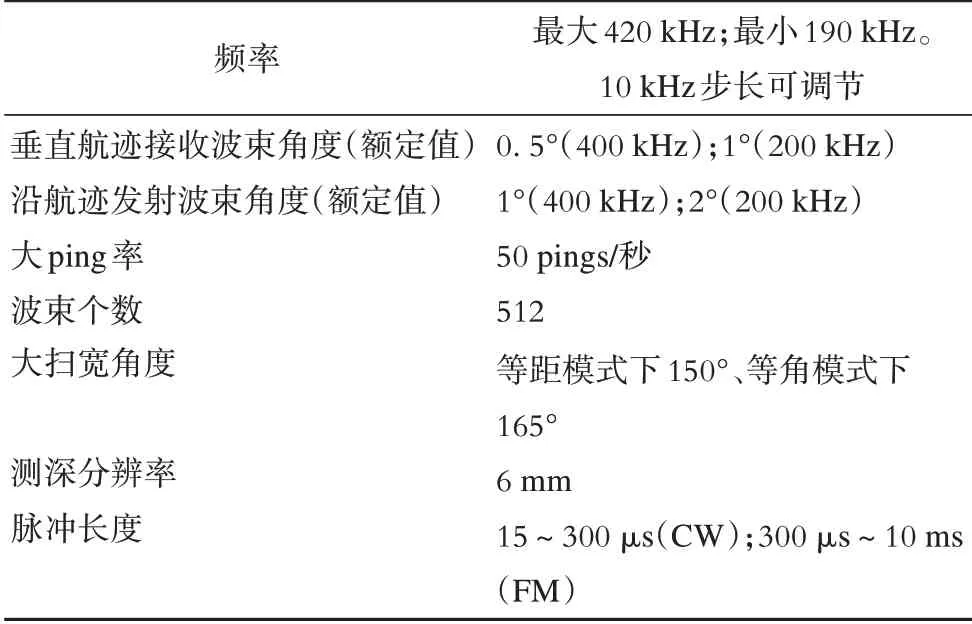
表1 多波束测深系统技术参数Tab.1 Technical parameters of multi-beam sounding system
广东某一海上浮式风电装备研制项目位于广东省湛江市徐闻县东侧海域,场址中心坐标为北纬20.318°,东经110.579°,面积约7.6 km2,场址中心离岸距离约13 km,水深32~78 m。本项目拟安装1台单机容量为5 MW风电机组,完成“海上浮式风电装备研制”工程示范要求,并开发利用良好的风能资源,向电网提供清洁的可再生能源。通过资料收集,项目所在区域海底表层底质以粉砂、细沙为主;同时项目地处北回归线以南的低纬地带,属亚热带海洋性季风气候,冬季NE-E风向较多,夏季ESE-SSE风向较多,多年月平均风速为2.4~3.5 m/s;年平均气温为24.5℃,潮汐类型为不正规半日混合潮;海水温度最高值为30.86℃,最低海水温度值为28.71℃。测区地理位置见图2。
2.2 项目实施
2.2.1 测线布置
主测线沿测区南北走向布设,测线间距为100 m,保证多波束能全覆盖扫测,且其有效条带重合度大于条带宽度的15%;检测线垂直于主测线,检测线间距为1 200 m,检查线长度约占主测线数的7.5%,多于规范要求的5%要求。
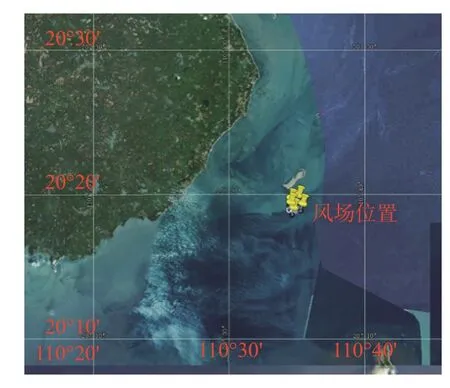
图2 测区地理位置图Fig.2 Geographical location map of the survey area
2.2.2 声速剖面测量
为了获取高精度多波束水深数据,每日作业前、作业中、作业后在测区两端与中央的水域测定声速剖面,确保投放的单个声速剖面仪投放位置控制范围小于5 km,声速剖面测量时间间隔小于6 h,测量的声速剖面位置为附近水域最深水深,表面声速变化大于2 m/s时重新测定声速剖面。通过数日的实时监测,作业区域内监测的表面声速约为1 530 m/s。声速剖面曲线图见图3。
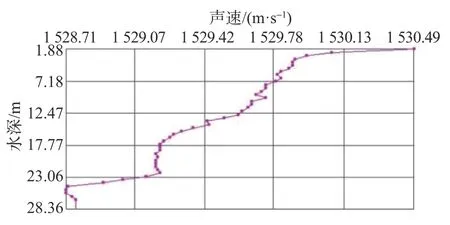
图3 声速剖面曲线Fig.3 Curve of sound velocity profile
2.2.3 潮位观测
测区距离岸边约13 km,水深测量时采用GPS RTK技术测量作业区域的水位变化,并根据实测的水面高数据生成当日的潮位文件,用于改正多波束水深测量值。
2.2.4 多波束安装和调试
SeaBat T50-P多波束的换能器采用舷侧安装法安装,装在船中部牢固不活动的部位,此位置远离船主机、泵和螺旋桨并有效避免勘察船摇摆及噪音干扰,其他仪器设备均安装在其合适位置。POS MV定姿定位系统,IMU和换能器通过刚性连接安装在一起。多波束安装相对位置见图4。
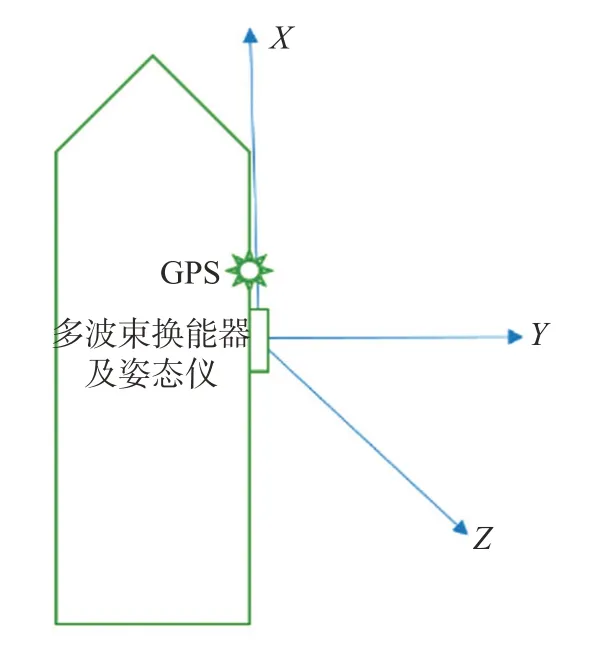
图4 多波束安装相对位置Fig.4 Multi-beam mounting relative position
设备安装完毕后,对各设备的工作状态进行调试,所有设备测试正常后才可进行下一步工作。
2.2.5 多波束校准
为了确定多波束换能器的初始安装角度,需要进行多波束校准测量。在测区附近水域布设合适的测线,分别校正横摇差(Roll)、纵摇差(Pitch)、艏摇差(Yaw)及船舶动吃水测定等项[10],各校正参数按照相应的方法进行。经外业数据采集,通过软件校准计算求得各改正值,横摇(Roll):0.06°;纵摇(Pitch):-0.77°;航向(Yaw):0.06°。
根据校正结果对采集的4条测线数据进行Roll,Pitch,Yaw参数校正并进行数据合并检验,合并结果显示测线之间拼接情况良好,因此,本次校正参数符合要求,可用于本次多波束正常作业波。多波束校正作业区域和测线见图5。
2.2.6 多波束数据采集
多波束外业测量采集的数据主要包括GPS定位数据、多波束测深数据、光纤罗经的罗经姿态数据和现场测量的一些基本数据。外业采集数据时使用Sonar UI多波束控制软件和PDSControl Center数据采集软件,测量期间,每天观察吃水变化,并量取变化值做好记录,测量船作业时船速控制在5节左右,不大于6节,保证测量数据质量良好。测量过程严格按照操作说明作业,设备工作正常,软件运行稳定。多波束外业测量见图6。
2.2.7 侧扫声呐障碍探测
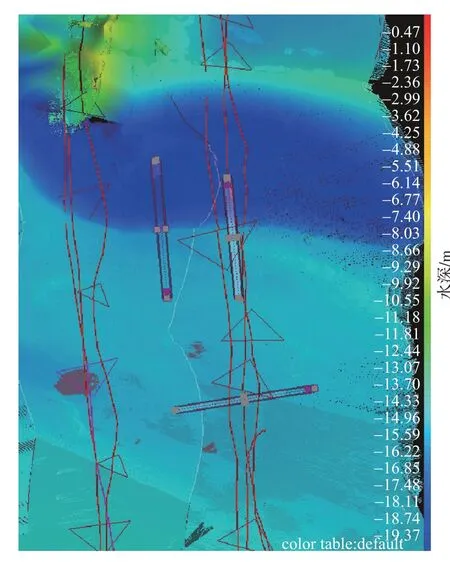
图5 多波束校正作业区域和测线Fig.5 Multi-beam calibration of operating areas and survey lines
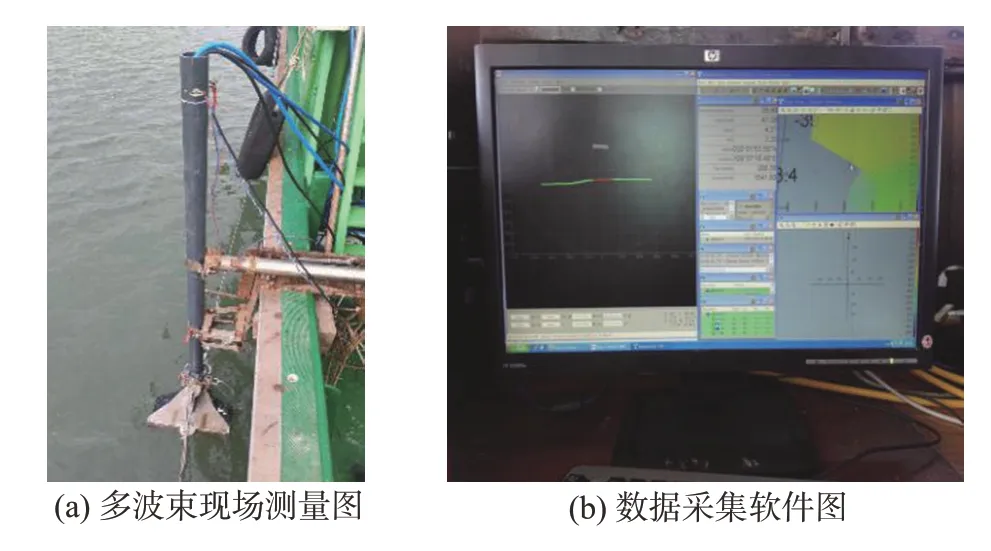
图6 多波束外业测量Fig.6 Multi-beam field survey
在调查中,侧扫声呐采用船舷拖拽方式,放缆长度约8 m。工作前,我们对侧扫声呐系统进行严格的状态调试,调试的主要内容包括:拖鱼入水深度、侧扫作业模式的选定、信号的发射与接收、增益、TVG调节等。侧扫声呐作业时船速控制在5节以内,这样既能保证质量,又能提高作业效率。
3 数据处理
多波束数据处理采用CARISHIPS软件,在处理前,检查各传感器的偏移量、系统校准参数等相关数据的准确性,基本的处理流程如下:
1)创建新项目,建立船型文件。
2)声速文件的编辑,按CARIS要求的格式导入声速数据。
3)潮位文件的编辑,按CARIS要求的格式导入潮位数据,潮时采用UTC标准时间。
4)将PDS数据导入Caris。
5)对数据进行潮位改正、声速改正及Merge合并。
6)编辑水深数据,利用Caris软件的Swath Editor、Subset Editor等编辑模块对数据进行粗差剔除。
7)计算总传播误差,并建立实测地域图(Field Sheets),然后采用CUBE加权平均算法建立加权平均水深数据曲面(Base Surface),该算法是当前最先进的半自动多波束数据处理方法。本工程建立了分辨率为1 m的水深曲面。
8)由CARISHIPS软件输出标准的ASCII文件格式,用于水深图的绘制。多波束数据后处理流程见图7。
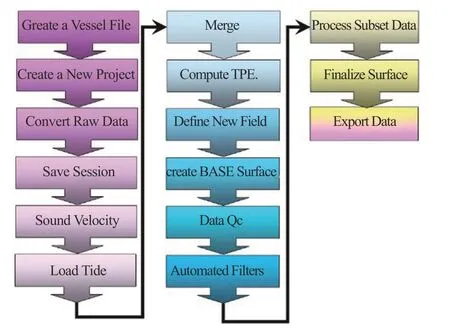
图7 多波束数据处理流程Fig.7 Multi-beam data processing
4 成果分析
利用Caris软件根据以上数据处理流程,分别得到了测区内1 m及5 m格网的数字高程模型见图8。通过数字高程模型可以直观地看出1 m格网比5 m格网的数字高程模型精细化程度高,更能清晰的表达地形地貌特征。海底地形主要以链状沙坡地貌为主;但在测区的东侧有一处凹坑,长约380 m,宽约110 m,最深处约89.2 m,海底有较多长短不一的沙波地貌,走向为东西方向,个别沙坡长约680 m,高差达15 m,最大坡度约为11°。整个区域的地形呈南高北低,部分断面图见图9,三维效果图见图10。
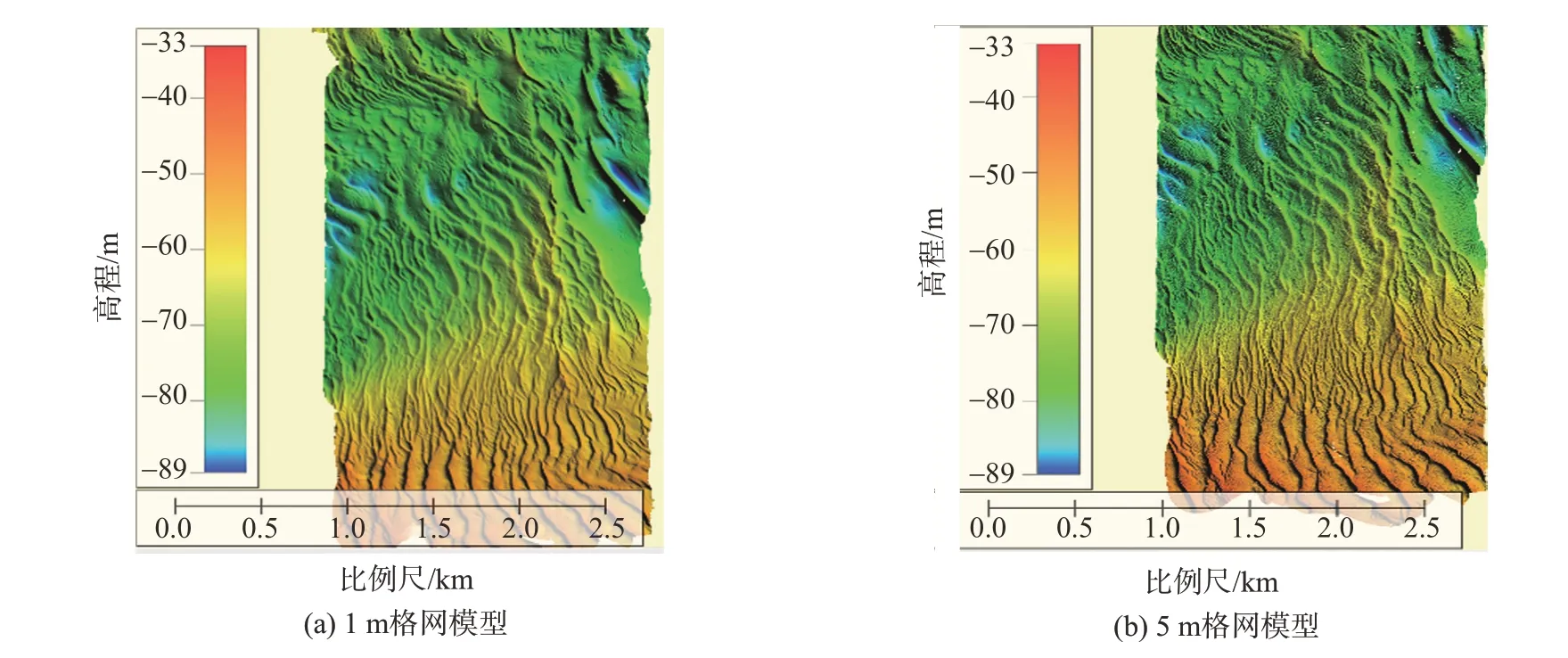
图8 数字高程模型Fig.8 Digital elevation model
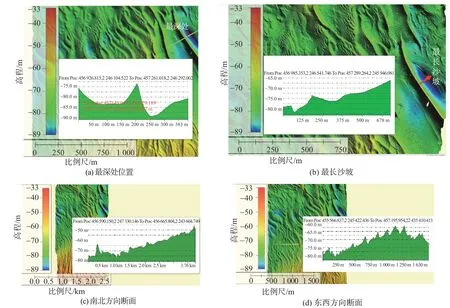
图9 断面图Fig.9 Profile
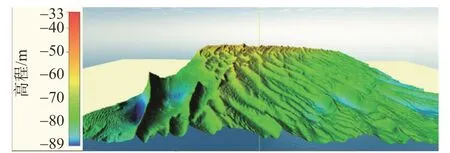
图10 三维效果图Fig.10 3D effect graphic
将Caris7.0数据处理完成后得到的XYZ成果,利用南方CASS软件按1∶1 000比例尺绘制水深图。按相应规范要求绘制各要素和标注形式,最终生成数字线划图见图11。从数字线划图中等高线的稀疏密度可看出,在有沙坡的区域地形变化较明显。
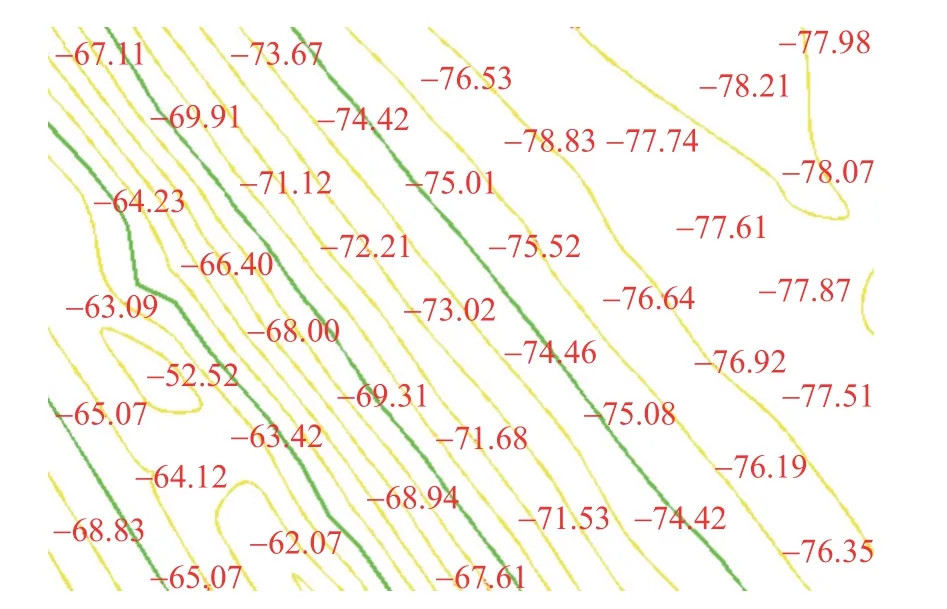
图11 数字线划图Fig.11 Digital line graphic
通过SonarWiz.Map软件对每条数据输入位置偏移量进行改正,再进行数据的拼接,提取有利用价值的地物,对地物的尺寸、高度、属性等进行解译,处理完毕后输出TIF图形文件和地物分析报告。侧扫声呐障碍物探测结果见图12。
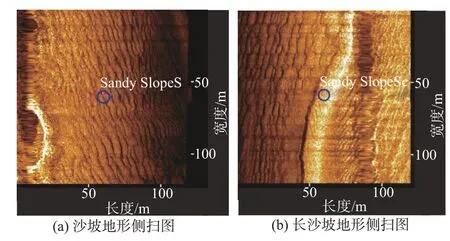
图12 侧扫声呐障碍物探测结果Fig.12 Obstacle detection results from side scan sonar
从侧扫声呐障碍物探测结果可以看出,该区域的地物主要是沙波地貌,期间没有发现沉船、大礁石、管道等障碍物。
5 精度评定
十字交叉水深精度评估方法既是单波束测深的传统水深精度评估方法,也是多波束测深的有效水深精度评估方法[11-13]。该方法考虑了多波束系统换能器、各传感器的随机误差、系统误差和换能器、各传感器空间安装的组合误差,因此该方法是除没有考虑水深系统误差外的最为有效的水深精度评估方法。参照《海洋调查规范第10部分:海底地形地貌调查》(GB/T 12763.10—2007)规范及《测绘成果质量检查与验收》(GB/T 24356—2009)[14-15],利用主测线与检测线重合点水深不符值,进行水深测量准确度估计[16]。本工程通过主测线和检查线深度比对(检查半径为图上1 mm),有效检查水深点1 902个,精度对比情况见图13。从表可知本次多波束测量精度满足规范要求,成果质量可靠。
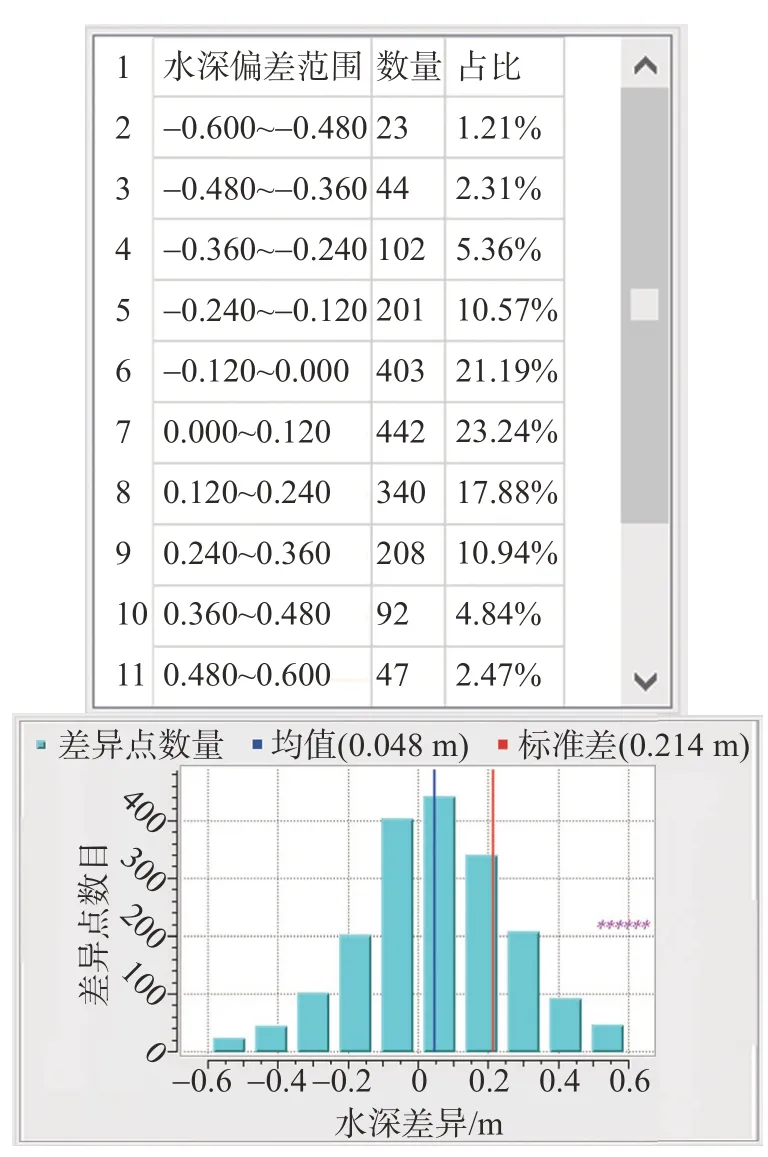
图13 精度对比情况Fig.13 Accuracy comparison
6 结 论
本文介绍了SeaBat T50-P多波束测深系统在海上风电项目中的具体应用,重点论述了多波束的测量原理及实施的关键步骤,并对测量成果的精度进行了详细分析,表明SeaBat T50-P多波束测深系统在此次海上风电场地形测量中成果合格,质量可靠,满足工程的需要。
近年来,多波束测深的技术发展迅速,仪器结构方面向更小的体积和重量、更高的集成度以及更灵活的安装和维修方面发展。数据处理软件更加自动化、智能化、精细化,图像处理速度更快,功能更加完善以及成果表达更加丰富等方面发展。
随着海上风电开发活动由近海向深海发展,多波束测深系统将成为深水区地形测量的主要技术手段,在海上风电开发活动中的将会发挥着越来越重要的作用,多波束测深系统在深水区地形测量的应用将会是我们一下步研究的重点方向。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导弹与航天运载技术(2022年2期)2022-05-09
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
现代电子技术(2020年3期)2020-08-04
舰船科学技术(2020年3期)2020-04-22
小学生作文选刊·中高年级版(2017年10期)2017-11-07
中学生数理化·八年级物理人教版(2017年2期)2017-03-25
中学生数理化·八年级物理人教版(2016年7期)2016-12-24
表面工程与再制造(2014年2期)2014-02-27