一种C波段雷达云雨气象干扰源检测方法
2021-10-08 04:52:08曲圣杰
雷达科学与技术 2021年4期
曲圣杰, 高 越, 常 城
(中国电子科技集团公司第三十八研究所, 安徽合肥 230088)
0 引言
C波段雷达由于波长更短,相对于S波段雷达在等同信噪比情况下测角精度可以提高1倍,而且保持了较好的穿透性,特别适合于对作用距离和精度同时要求较高的情况,譬如炮位侦校雷达。但由于C波段雷达特殊的波长特性,容易受云雨气象杂波影响,因此多用于气象雷达[1]。
现代雷达由于复杂的电子对抗环境,抗干扰功能是必不可少的;对干扰源的正确检测,不仅可以自适应地调度雷达系统的抗干扰功能,而且可以通过将辅助波束对准干扰源方向增加辅助波束的干噪比,从而提升系统的旁瓣对消抗干扰性能[2-3]。由于C波段雷达对云雨气象杂波的敏感性,实际工程应用中发现经常会把云雨杂波检测为压制干扰,从而错误地调度了雷达系统的抗干扰功能,浪费了雷达系统资源。
目前文献中关于干扰源检测与定向方面大量集中在通信领域以及欺骗式干扰方面[4-8],结合工程实际探讨云雨杂波环境下干扰源检测定向的文献非常少见。本文着重于研究并提高C波段雷达在云雨气象环境下的适用性,通过一部俯仰向同时多波束、方位相扫体制的C波段雷达获取的大量工程试验数据,分析云雨气象杂波与有源压制干扰在俯仰、方位维度的差异,提出了波位内/波位间两级干扰源检测方法。该方法在保证真实有源压制干扰被成功检测的情况下,极大地抑制了云雨气象杂波导致的虚假检测。
1 云雨杂波引起干扰虚警问题描述
有源压制干扰的直接表现就是回波信号噪底异常抬高。所以对有源压制干扰源的检测中,最常见的方法就是在回波信号中选择较为清洁的区域统计噪底,并将噪底与没有干扰情况下的噪底值进行比较,如果差值高于设定阈值,则认为回波中存在有源压制干扰,然后通过与匿隐天线接收的回波幅度比对,判断干扰是否来自主瓣方向并进行精确测向。在具备自适应抗干扰功能的雷达系统中,会根据干扰源的检测和测向结果调度辅助天线指向干扰源,提高辅助天线的干噪比用于旁瓣对消处理。
由于C波段的气象敏感性,云雨杂波同样会带来噪底的大幅抬高。试验所采用雷达正常情况下回波噪底约66.3 dB,某次云雨回波及主瓣干扰视频回波分别如图1、图2所示,云雨气象回波噪底达到90.06 dB,压制干扰 95.82 dB,相对正常情况均有很大幅度提高并且高于匿隐门限,所以仅根据噪底抬高情况和与匿隐回波比较判断是否存在干扰会带来大量虚警。
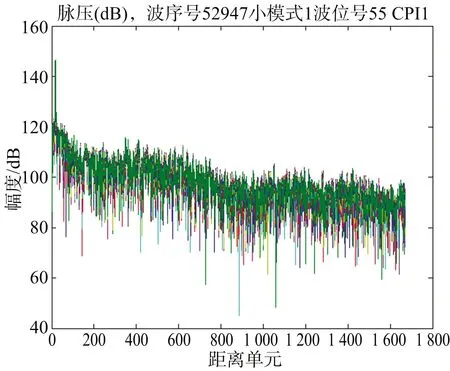
图1 云雨气象回波
2 波位内/波位间两级干扰源检测方法
对于雷达系统来说,云雨气象杂波和有源压制干扰属于不同特性的目标。工程试验中发现,二者虽然都会引起噪底的抬高,但在波位内不同俯仰方向以及波位间不同方位方向的幅度特性却存在明显差异。针对这些差异提出一种波位内/波位间两级干扰源检测方法,在保证真实有源一压制干扰正确检测的同时对云雨虚警进行滤除,具体如下。
2.1 波位内不同俯仰方向差异分析及检测方法
首先计算各俯仰波束的噪底并提取样本点。实际工程中,当脉冲重复周期较短时,回波视频数据中存在很强的地物杂波,往往难以在不同波位指向中找到共同的噪声区域,这里给出一种自适应的局部区域最小最大法以计算噪底并提取样本点,方法简单易实现,可以有效规避地物杂波干扰,方法如下:
1) 将完整的统计区域均匀分成若干个子区域,计算每个子区域的幅度均值avg1;
2) 取幅度均值最小的区域,记录最小幅度值avgmin并记录该区域内的统计点位置;
3) 对所有统计子区域的幅度均值,求均值幅度avgall;
4) 比较avgmin与avgall,若二者相差较小,则采用avgall对avgmin进行平均修正以增加准确性,否则直接输出avgmin作为噪底;
5) 对最小幅度均值区域的统计点进行排序,选择最大的N个点作为样本点。
通过上述方法统计噪底幅度,可以较为有效地规避固定杂波对噪底计算的影响。获得所有俯仰波束噪底幅度后,统计噪底幅度最大的俯仰波束号及其对应的噪底幅度值,然后去掉当前最大俯仰波束及其相邻波束,计算得到其他俯仰波束的噪底均值。然后通过俯仰波束间的幅度关系,对云雨杂波和真实干扰进行分辨。
由于压制干扰来自于干扰机,为点干扰,所以不同俯仰波束的幅度关系服从于俯仰接收波束方向图,如图3所示;而云雨杂波为体目标,不同俯仰波束的幅度关系会受到不同云雨状况时云层或雨滴在俯仰空间的分布影响,导致表现出来的俯仰波束幅度不满足接收方向图情况。所以可以结合方向图通过以下几个原则进行分辨:
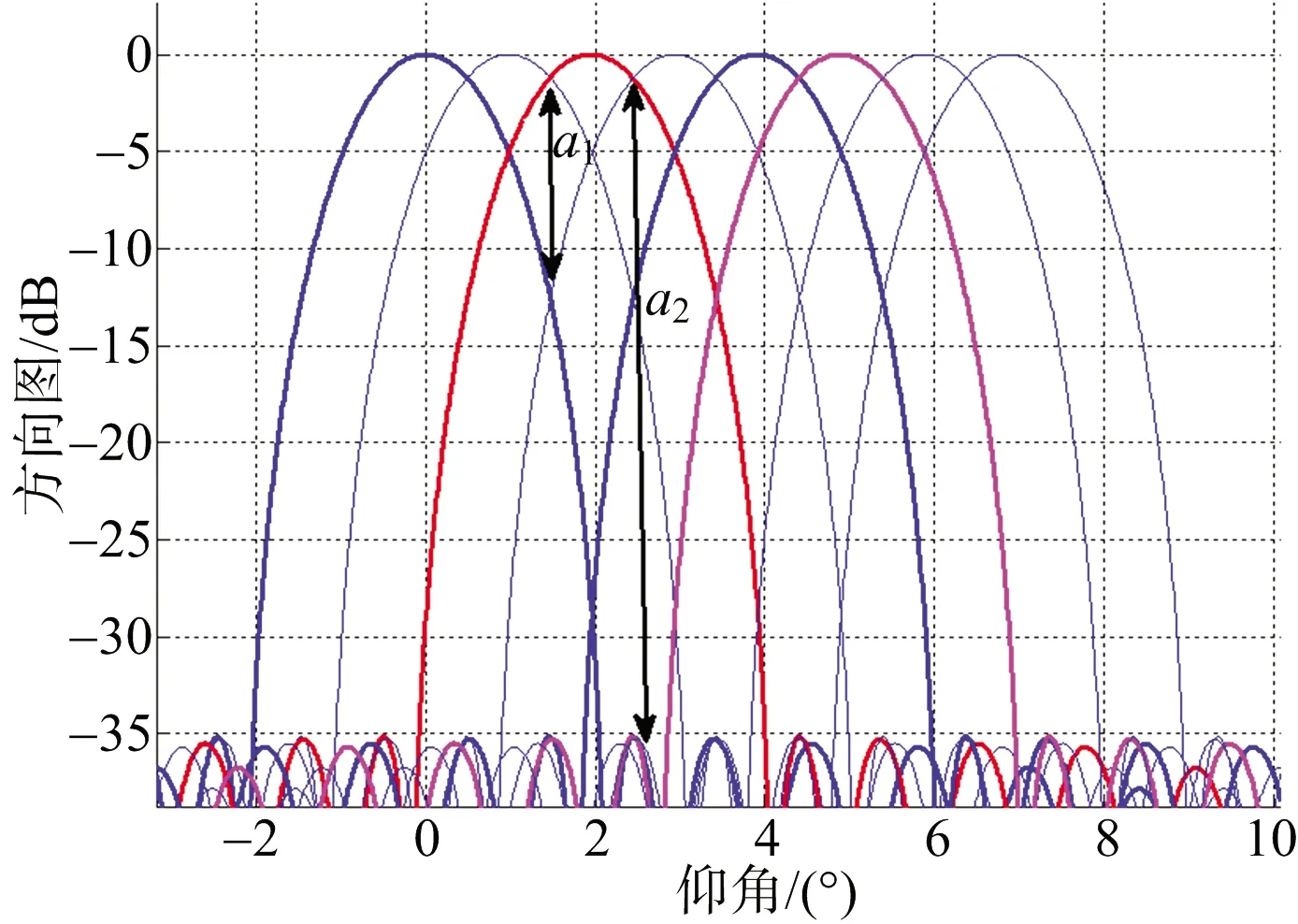
图3 俯仰接收波束方向图
1) 最大幅值波束与间隔1个波束幅度差大于a1;
2) 最大幅值波束与间隔2个波束幅度差大于a2;
3) 最大幅值波束与去掉自身及相邻波束的其余波束幅度均值的幅度差大于a3,其中a1≤a3≤a2;
最后与匿隐波束噪底幅度值进行比较,大于适当的匿隐门限以区分主瓣与副瓣干扰。
2.2 波位间不同方位方向差异分析及检测方法
通过波位内不同俯仰波束间的幅度关系,可以滤除大部分云雨杂波干扰,但由于云雨杂波的复杂多样性,以及实际工程中为了尽可能提高真实干扰源的检测概率对门限a1、a2预留适当的保护,仍然可能会存在云雨杂波满足波位间幅度关系情况出现虚警检测。
由于云雨杂波的体目标特性,在方位向较为均匀散布;而干扰机发出的压制干扰信号同样符合方位向不同波位间的方向图特性。所以可以通过建立方位向波束间的噪底图,对云雨杂波进行进一步的滤除,具体方法如下:
1) 对一个波位的所有脉冲,按照2.1节中给出的方法提取样本点后,对干扰源指向角度进行测量,统计测量结果,若俯仰角和方位角均小于σ,则认为该脉冲检测结果有效。无论是否检测到干扰,均统计该波位所有有效脉冲的噪底均值;
2) 通过噪底均值构建噪底图,设定最大和最小容许范围,对噪底图进行比例更新;
3) 统计波位内有效检测脉冲情况,当有效检测脉冲数多于总脉冲数的r%时,将波位噪底均值与当前噪底图进行比较,若波位噪底均值与噪底图幅度差值大于门限a4,则最终判断为真实压制干扰,输出测角结果。
2.3 方法流程图
综上所述,波位内/波位间两级干扰源检测方法流程图如图4所示。

图4 波位内/波位间两级干扰源检测方法流程图
3 试验及结果分析
采用某型号C波段雷达在对云雨气象下采集数据,分析所提方法对云雨杂波虚警抑制效果;同时在没有云雨的气象环境下满足远场条件放置干扰机,采集干扰数据,分析所提出的方法在满足云雨杂波虚警检测的情况下,对真实干扰信号的正确检测能力。雷达在方位向采用相扫方式覆盖-45°~45°范围;俯仰向采用同时8个俯仰波束,覆盖约6.4°范围。
3.1 云雨杂波虚警抑制情况分析
采集的云雨杂波数据在不同的俯仰波束的噪底幅度如图5所示,图中每条线为1次检测样本,横轴对应不同的俯仰波束号,可知,云雨杂波在空间上具有较为明显的“云层雨层”特征,在1~4波束具有较大的幅度值,在2、3波束达到最大值,随后逐渐降低;但即使在具有最大幅度值的1~4波束,幅度值也变化较为平缓。

图5 云雨回波不同俯仰波束噪底幅度
按照2.1节波位内方法,幅度差a3满足a1≤a3≤a2,试验所选用的雷达理论上a1约为11.5 dB、a2约为35 dB;为同时满足对真实干扰的正确检测,试验中根据工程经验设置:a1=8 dB,a2=a3=18 dB。最大幅值与去相邻波束均值幅度差情况如图6所示,可知根据该方法可以去除大多数虚假点,图6中仍有个别样本满足大于阈值a3要求从而给出虚警,实际虚警概率为3.92%。间隔1个波束幅度差与间隔2个波束幅度差情况分别如图7和图8所示。可知由于云雨气象的多样性,方法对云雨杂波虚警有一定程序的辨别效果,但仅仅采用该方法仍然存在虚警情况,通过间隔1个和2个波束幅度差检测虚警率分别为22.55%和8.82%。综合使用上述波位内方法,检测虚警率降为0.98%。
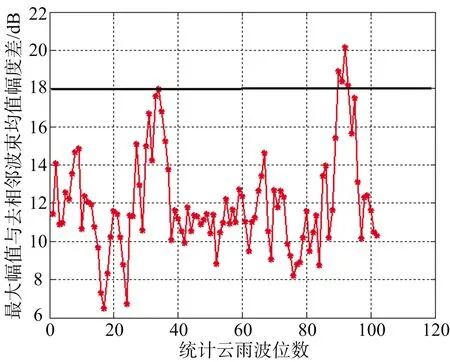
图6 云雨回波最大幅度与去相邻波束均值幅度差
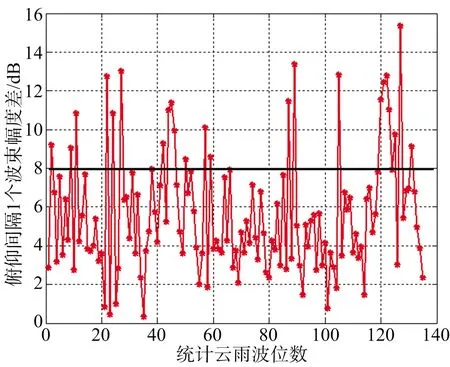
图7 云雨回波最大幅度与间隔1个波束幅度差
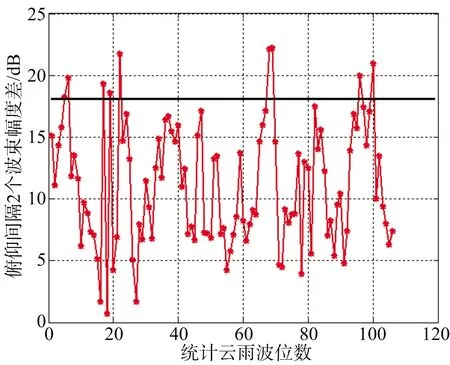
图8 云雨回波最大幅度与间隔2个波束幅度差
进一步采用2.2节波位间方法构建噪底图,样本最大波束幅值与噪底图情况如图9所示。由于云雨在方位向遍布的特性,在方位向波位间幅值变化较小,最大幅度值与噪底图差异较小,设置适当的门限a4便可以对云雨虚警进一步滤除。试验中,单独使用波位间方法虚警概率为3.92%,综合使用波位内和波位间方法,所有虚警被全部滤除,试验虚警概率情况总结如表1所示。
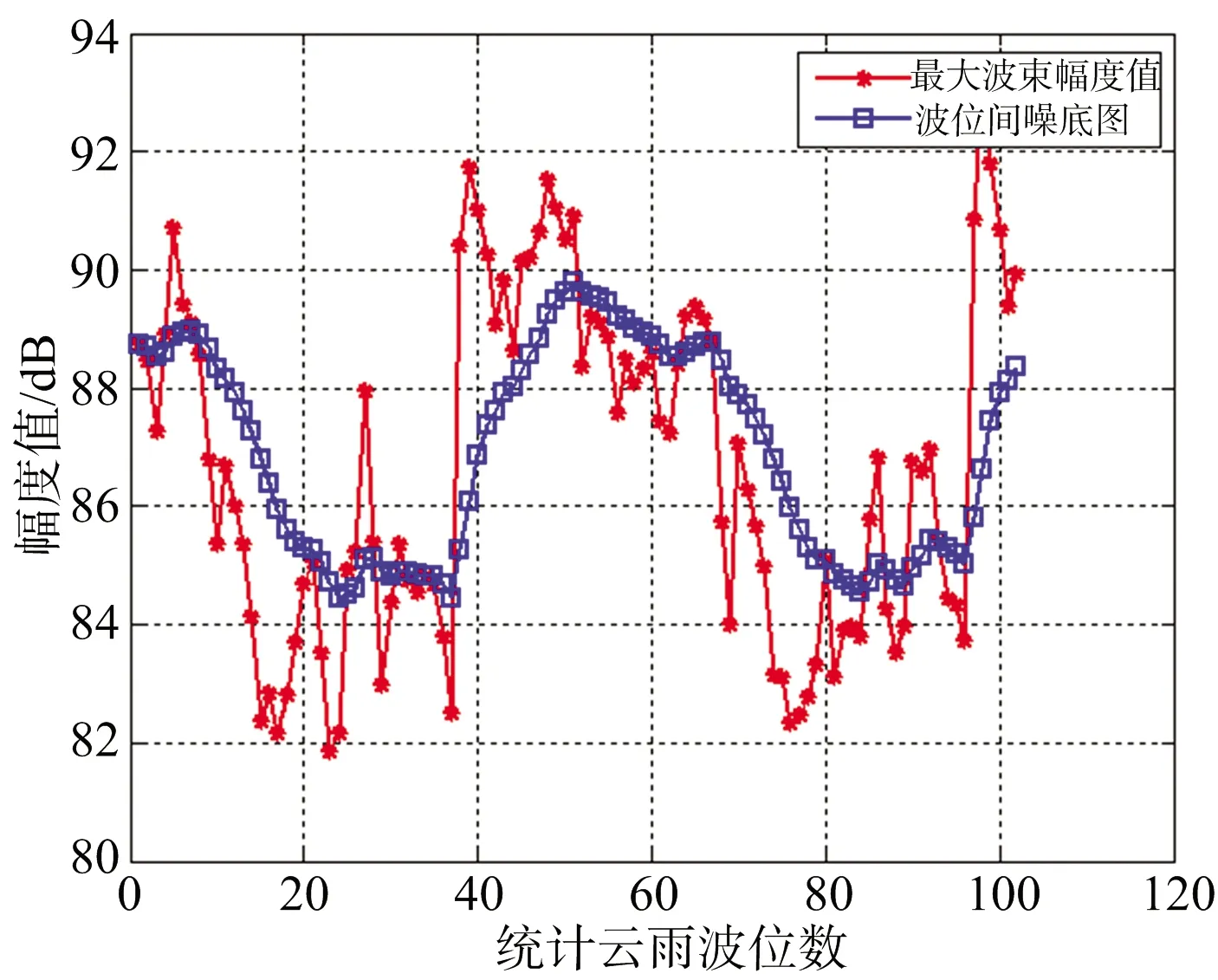
图9 云雨回波最大幅度与噪底图关系

表1 云雨气象虚警概率
3.2 真实干扰正确检测情况分析
满足远场条件放置干扰机并采集数据,为了与云雨杂波在波位内和波位间的情况进行对比分析,提取每次雷达相扫时主瓣指向干扰机的波位数据并分析。数据在不同的俯仰波束的噪底幅度如图10所示,由于干扰机放置在地面,而波束最低仰角中心指向干扰机,所以波束1噪底幅度最大,而其余波束按照俯仰向方向图迅速降低,与云雨杂波的缓变形成了鲜明对比。按照2.1节波位内方法,最大幅值与去相邻波束均值幅度差情况如图11所示,间隔1个波束幅度差与间隔2个波束幅度差情况如图12和图13所示。与图6、图7、图8相比,幅度完全超过了云雨杂波虚警检测设定的a3、a1、a2门限,采用波位内方法即可以将真实干扰完全正确检测,说明采用本文方法在抑制云雨杂波虚警的同时,并不影响真实干扰的检测。

图10 干扰回波不同俯仰波束噪底幅度

图11 干扰回波最大幅度与去相邻波束均值幅度差
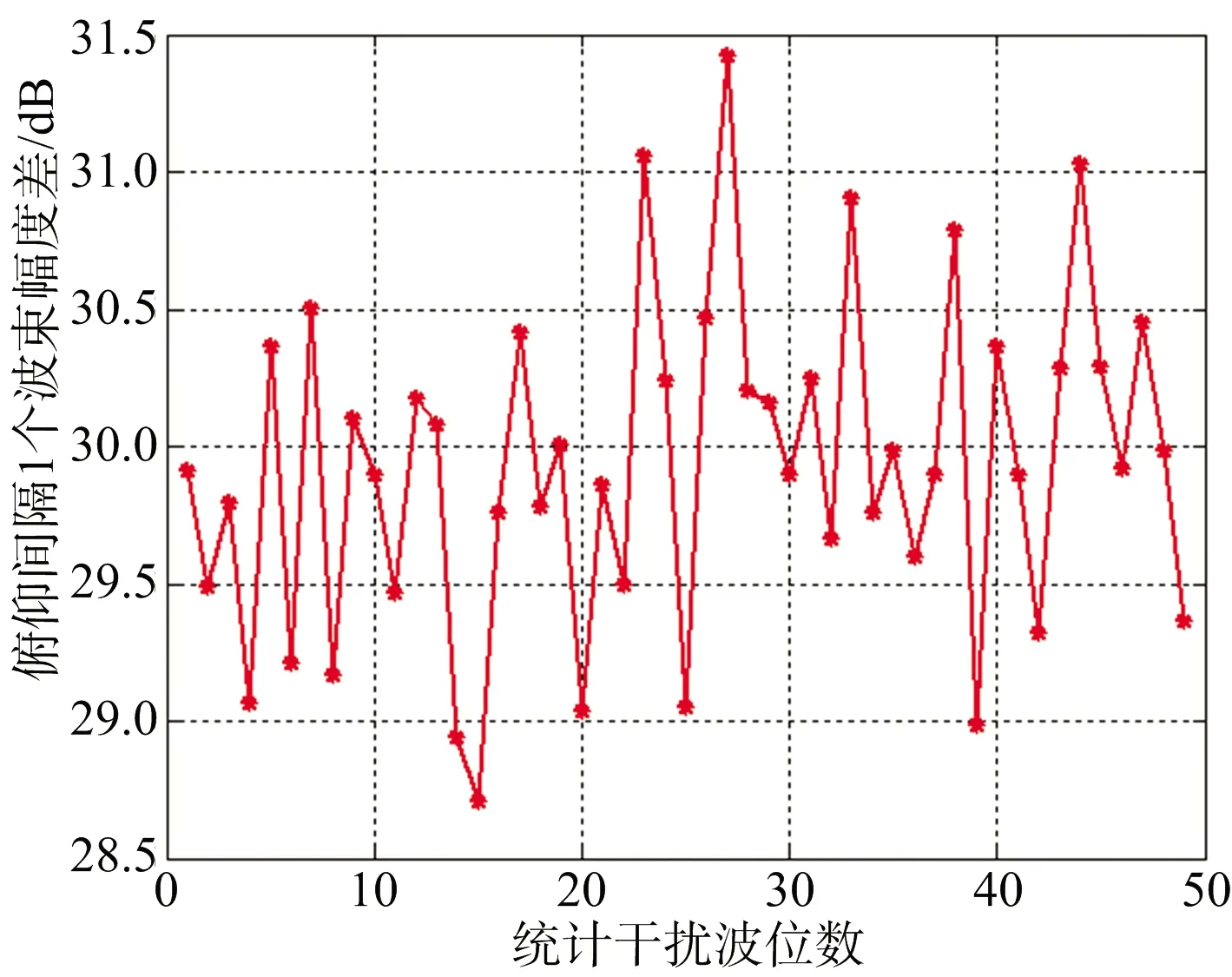
图12 干扰回波最大幅度与间隔1个波束幅度差
波位间分析则如图14所示,不同于云雨杂波的遍布特性,波束在方位向扫描时,指向干扰机时幅度会迅速增加,远离干扰机时幅值会迅速降低。波束指向干扰机时幅值与噪底图比较有明显差异,按照云雨虚警检测设置的门限a4,也可以正确检测出真实干扰。
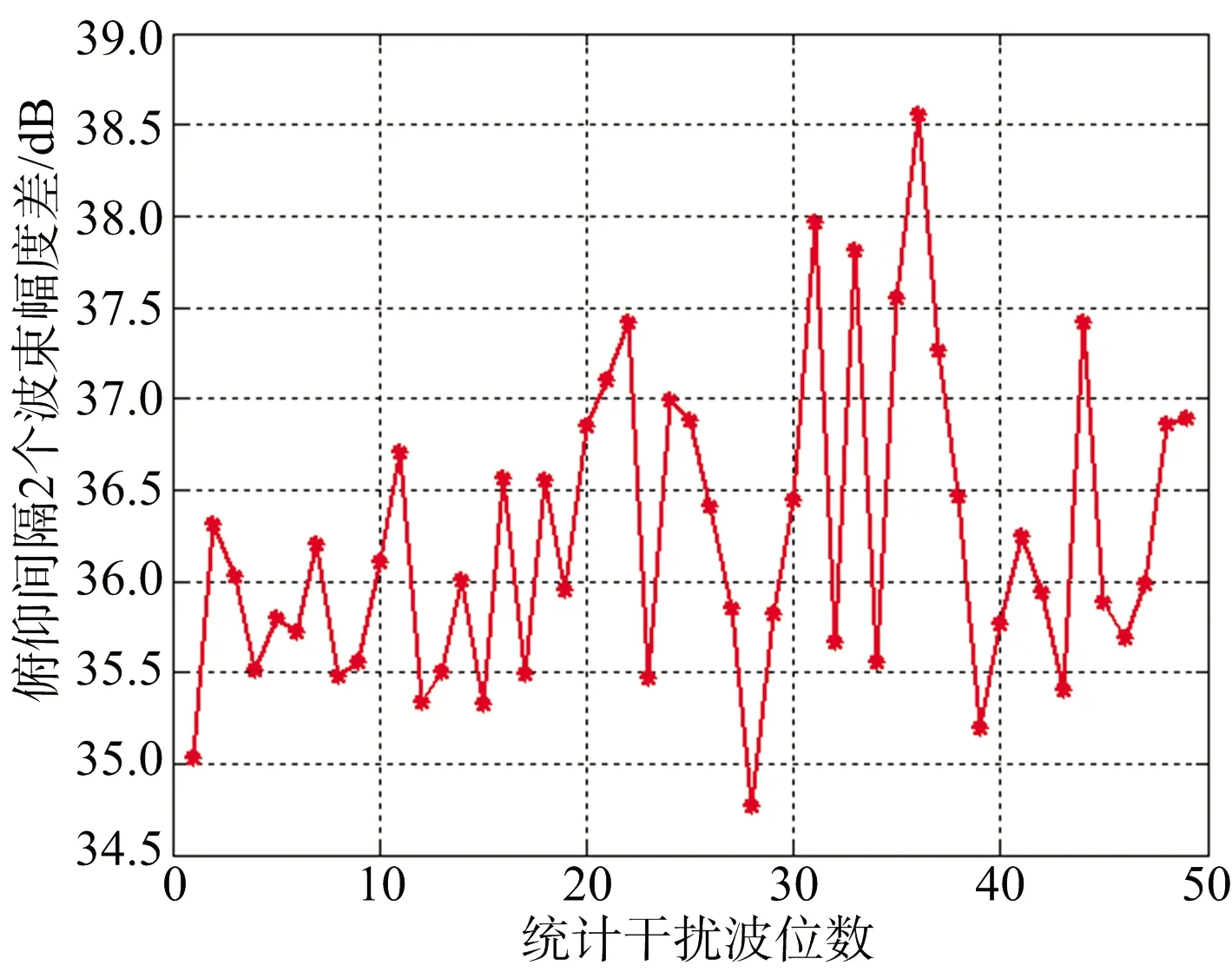
图13 干扰回波最大幅度与间隔2个波束幅度差
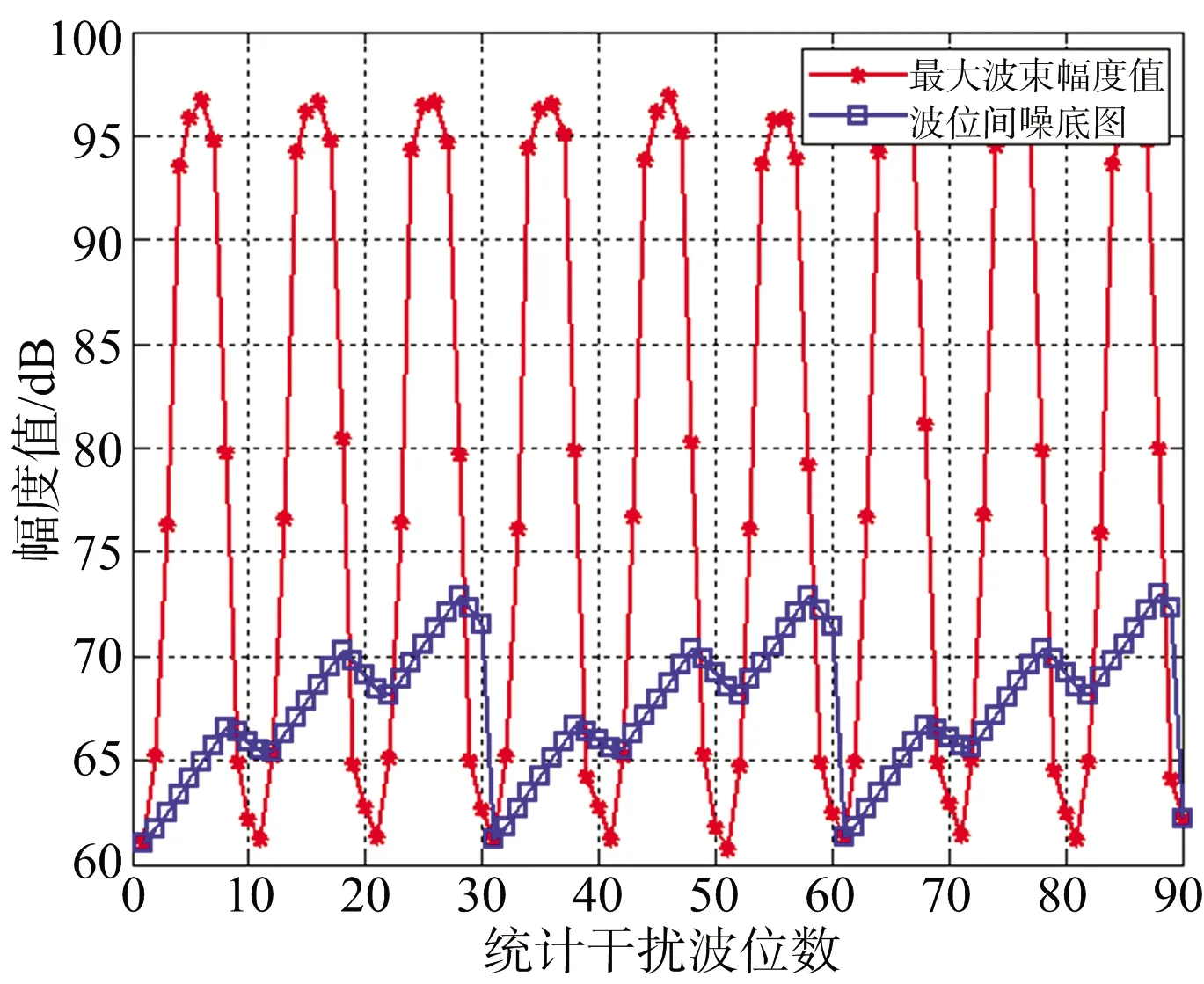
图14 干扰回波最大幅度与噪底图关系
4 结束语
本文提出从波位内到波位间两级干扰源检测方法,通过大量真实试验数据对方法的有效性进行了较为充分的验证,方法在工程中易于实现,用于某型号产品并取得了较好的效果,一定程度上提高了C波段雷达在恶劣云雨气象环境下的适用性。由于C波段雷达对云雨气象的敏感性,在复杂气象条件下滤波后云雨杂波会占据更多频道,对于边缘频道目标的检测、测速带来很大困难,后续将进一步对C波段雷达在云雨气象下的目标检测及虚假目标抑制方面开展研究。
猜你喜欢
兵工学报(2022年11期)2022-12-01 12:52:12
学生天地(2020年15期)2020-08-25 09:21:50
化工职业技术教育(2020年2期)2020-06-01 00:28:16
物联网技术(2019年9期)2019-11-06 06:24:49
保健与生活(2018年12期)2018-07-17 02:53:08
科学与财富(2017年24期)2017-09-06 09:52:35
电子制作(2017年10期)2017-04-18 07:22:42
设备管理与维修(2017年1期)2017-04-11 03:21:42
电信科学(2016年9期)2016-06-15 20:27:25
中国交通信息化(2016年5期)2016-06-06 03:51:45