
重型卡车ADAS 系统应用
2021-10-08 09:23王卫翼
汽车电器 2021年9期
赵 阳,王卫翼
(北京福田戴姆勒汽车有限公司,北京 101400)
随着汽车智能化的迅速发展,ADAS系统(高级驾驶辅助系统)逐步开始在重卡车型上应用,目前可实现的功能包括:车道偏离预警(LDW)、碰撞预警(FCW)、自动紧急制动(AEB)、自适应巡航(ACC)等。
1 ADAS系统组成
ADAS系统由传感器(输入信号)、控制器、执行器(输出信号)3部分组成。传感器包括前置单目摄像头、毫米波雷达;执行系统为发动机和EBS电子制动系统。ADAS系统组成如图1所示。
ADAS系统电路如图2所示。雷达与摄像头之间有专用CAN线通信,以实现数据融合。摄像头内置的控制器通过PCAN实现与EBS、发动机ECU、BCU、仪表等电控单元通信。

图1 ADAS系统组成
雷达、摄像头安装位置如图3所示。
1)毫米波雷达
ADAS系统的前置毫米波雷达安装在车辆前保险杠内侧。由于毫米波遇到金属会被反射,因此根据雷达被前车反射回来的时间,就可计算出前方目标车辆的距离和相对速度。雷达的优势就在于纵向距离的测量。国标要求雷达有效测试距离不小于150m。
2)单目摄像头
安装于风挡玻璃下部内侧中间位置的摄像头用于识别车道线、车辆和行人目标。摄像头的优势在于横向角度及位置关系检测。系统依据摄像头信号实现车道偏离预警功能;而FCW、AEB、ACC等功能的实现,则需要雷达和摄像头信号相融合。
2 ADAS系统功能
2.1 车道偏离预警功能
车道线可识别(符合国标的白色或黄色实线、虚线),且车速在60~110km/h范围内,当车辆无意识偏离自车道时,就会触发车道偏离报警(仪表报警灯闪亮的同时蜂鸣器鸣叫)。
LDW系统对车道条件也有要求。车辆行驶在急弯(转弯半径小于250m)和狭窄(车道宽度小于2.5m)路段时,车道偏离预警将不能工作。
车辆偏离自车道,但驾驶员有主动驾控行为时,系统也不会报警。这些行为包括:开启转向灯、急打方向盘、踩制动、拉手刹等。
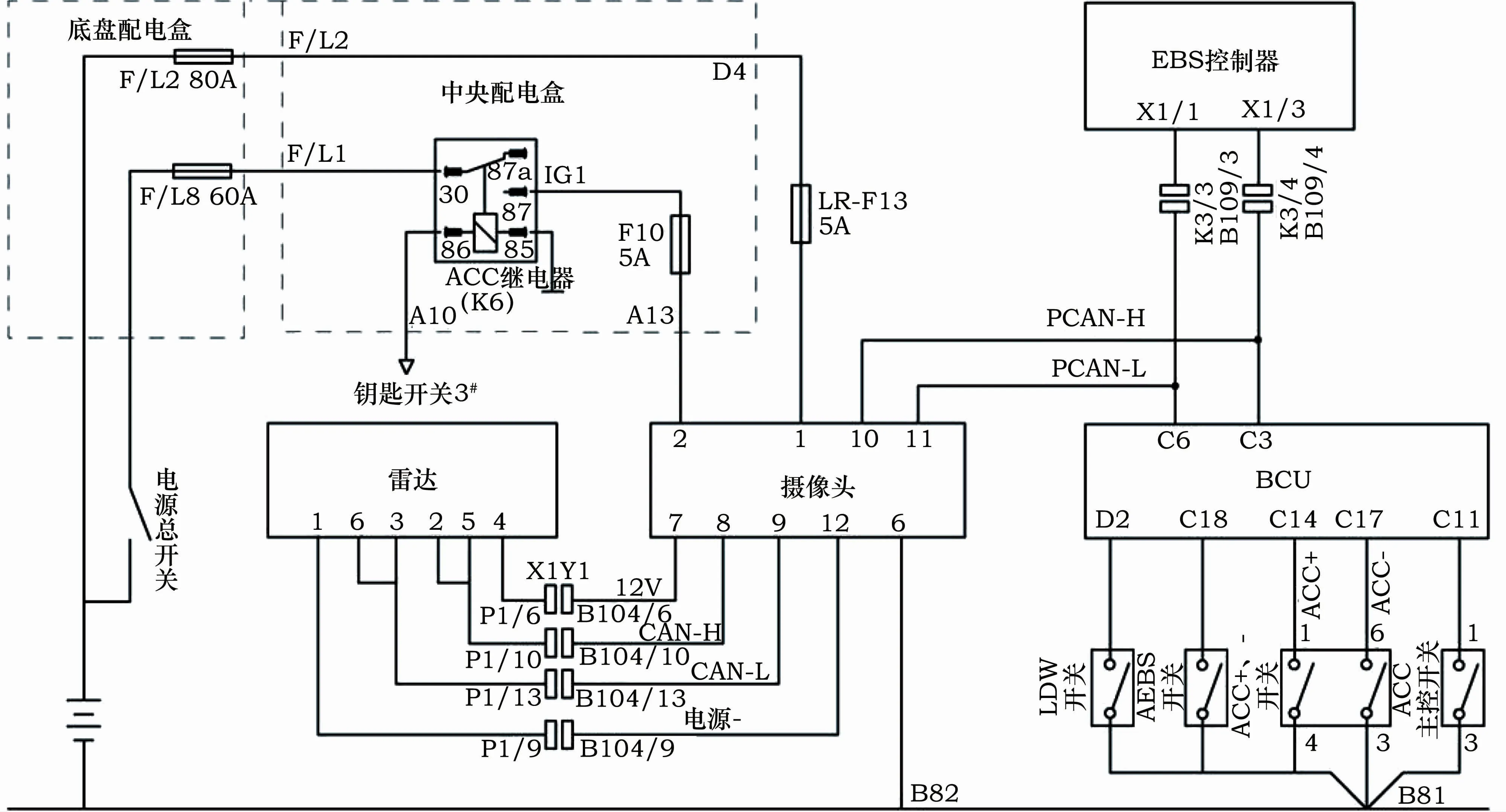
图2 ADAS系统电路
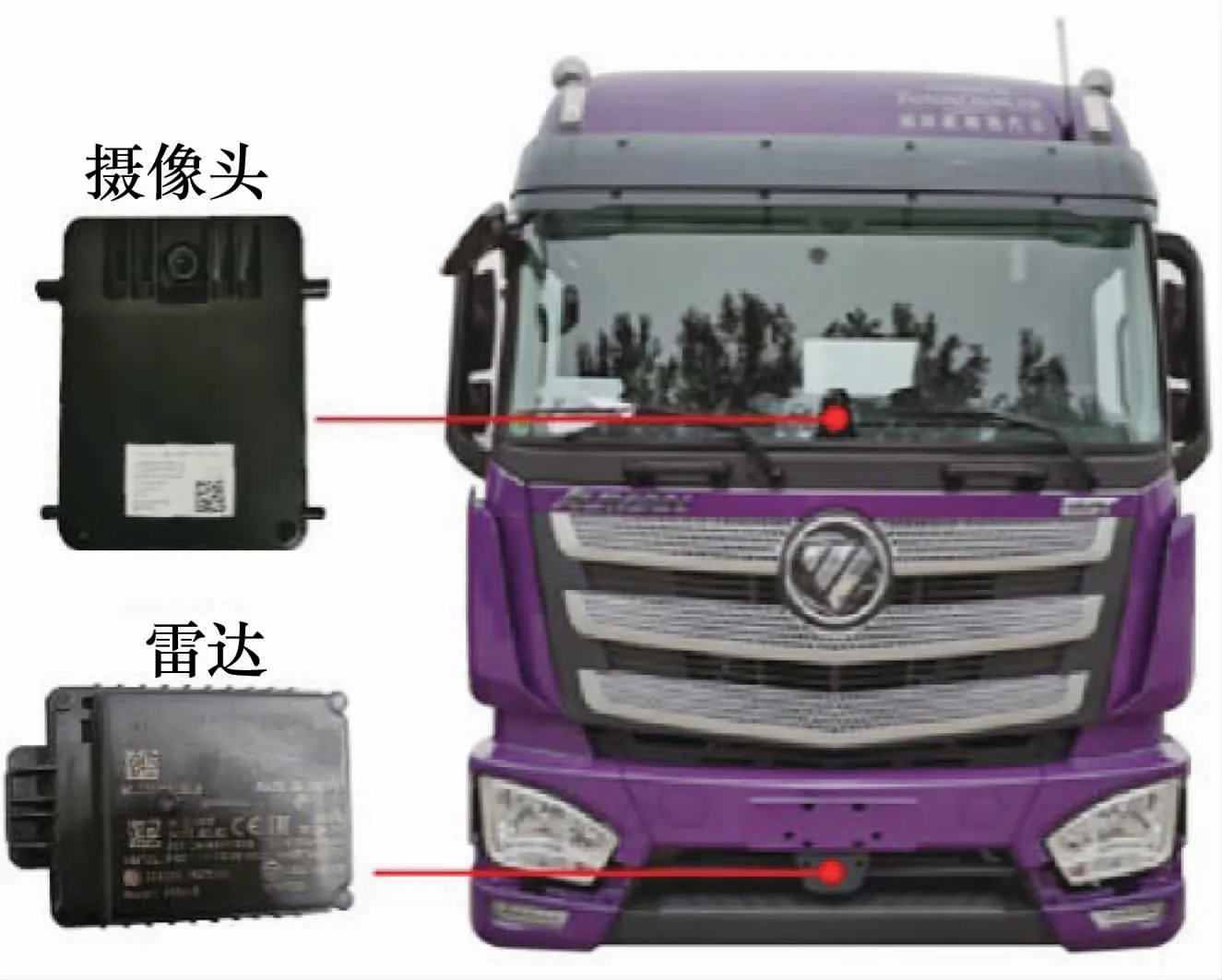
图3 雷达、摄像头安装位置
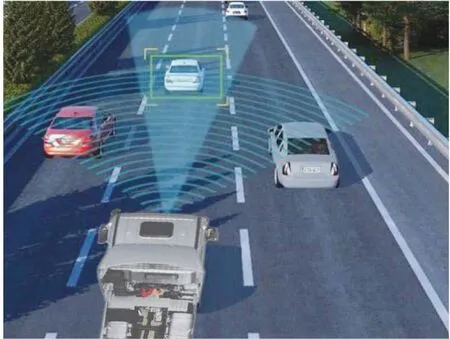
图4 锁定关联目标
2.2 自动紧急制动
系统通过数据融合确定与自车最相关的目标(即与自车具有相同行驶轨迹,同向行驶,且距离最近的前方车辆),而相邻车道的车辆则被忽略。AEBS系统工作车速范围:15~110km/h。图4为车辆锁定关联目标示意图。
当发现有碰撞危险时,AEBS系统进行干预。干预过程分为预警、部分制动和全制动3个阶段。AEBS系统三级响应如图5所示。
1)警告阶段:通过黄色报警灯闪烁、蜂鸣器鸣叫(一级报警)来提醒驾驶员接管车辆。如果驾驶员没有接管车辆,则进入部分制动干预。
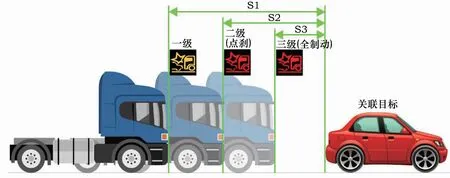
图5 AEBS系统三级响应
2)部分制动阶段:系统会向EBS系统发出制动指令,同时进行二级报警(红色报警灯闪烁、蜂鸣器鸣叫)。如果在此阶段车辆仍未被接管,接着会触发全制动。
3)全制动阶段:系统会向EBS系统发出全制动指令,同时进行三级报警(红色报警灯闪烁、蜂鸣器高频鸣叫)。
AEBS系统能够降低碰撞前车速、减缓冲击,但不能够完全避免碰撞发生,特别是目标为静止状态,或为横穿车辆的时候。AEB功能激活时,系统通过整车CAN网络向发动机ECU发出限扭指令。AEBS功能适用目标包括客车、货车、乘用车、摩托车、自行车、行人。
驾驶员下列操作,系统认定驾驶员主动接管,系统退出干预:①方向盘转动速率和转动量均超过一定阈值;②油门踏板行程增量和踩下速率均超过一定阈值;③油门踏板超过强制降挡阈值(85%)达到一定时间;④制动踏板位置和时间均超过一定阈值;⑤转向指示灯和时间均超过一定阈值;⑥操作AEBS开关。
以下条件下AEBS功能禁用:①速度太慢(14.4km/h)或速度太快(126km/h);②自车与目标的相对速度太慢;③自车在倒行;④EBS系统故障;⑤ESP功能异常;⑥雷达或摄像机故障。
2.3 自适应巡航
自适应巡航(ACC,Adaptive Cruise Control)系统通过单目摄像头与雷达数据融合来锁定前方同轨迹行驶的目标车辆,再通过控制油门和行车制动来实现以目标时距跟随前方车辆行驶。在没有前方车辆时,系统自动转入定速巡航工作模式。
1)ACC巡航操作:车速达到预期车速后,按下巡航开关,开启进入定速巡航模式。在定速巡航开启后,按下ACC开关(图6),即可进入自适应巡航模式。
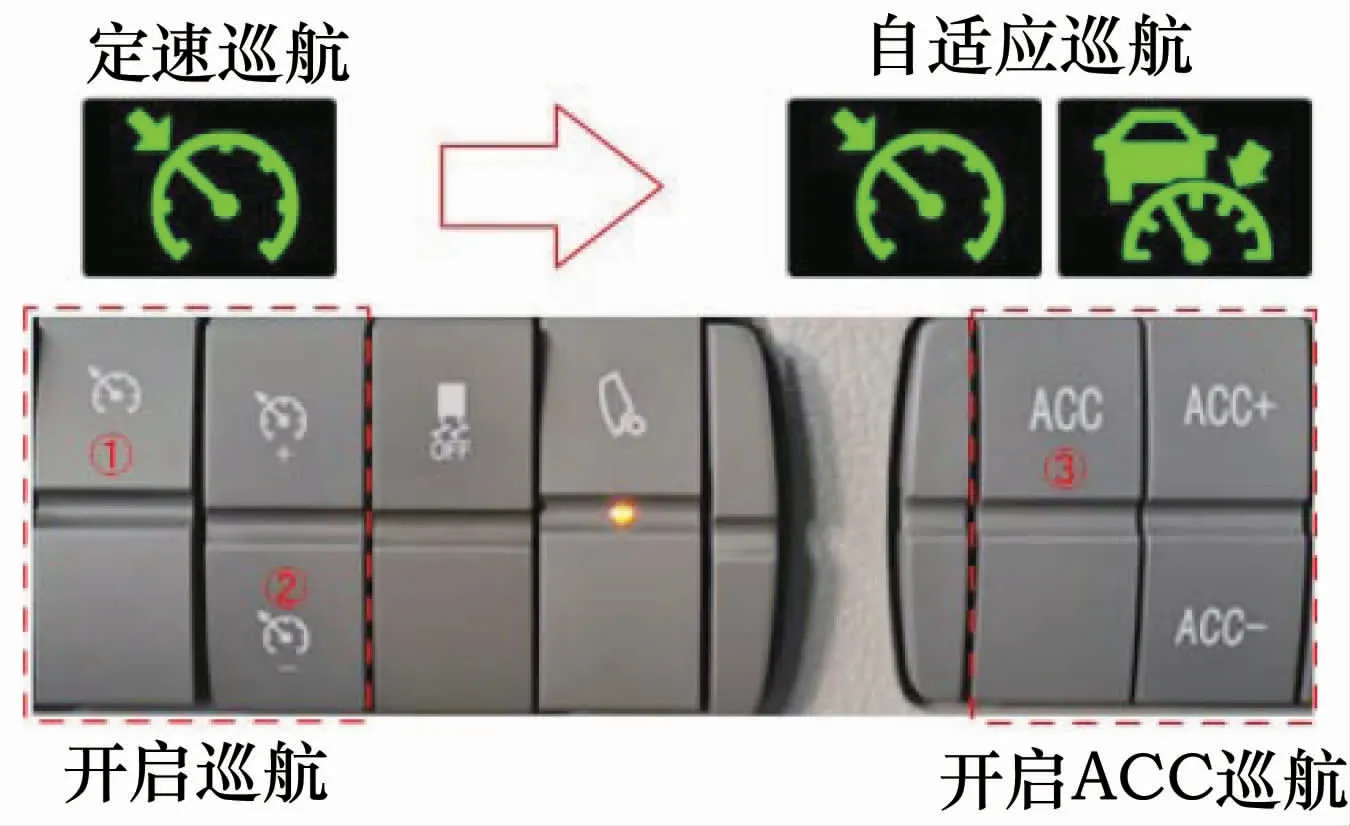
图6 开启ACC
2)跟随控制功能:自车以驾驶员设定的车间时距跟随前车巡航。驾驶员可通过ACC+、ACC-开关对跟车时距进行调整。跟车时距设置如图7所示。
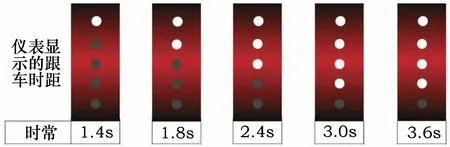
图7 跟车时距设置
3)定速控制:驾驶员通过巡航开关设定目标巡航车速,速度范围为30-100km/h。在无前方目标车辆或目标车辆车速大于目标巡航车速时,系统以定速控制模式工作,通过发动机扭矩控制,保持车辆恒速行驶。
4)适用目标:ACC对乘用车、货车、客车等车辆后端场景(不包括相向行驶车辆和横穿车辆)做出反应;对于自行车、摩托车、电动车、三轮车等特殊车辆,只有在快速行驶时才能够被选为目标车辆。
ACC解除条件有两种。
立即解除条件:①踩制动踏板;②拉手刹;③车速高于110km/h;④AEB功能激活;⑤驾驶员关闭巡航;⑥ACC相关系统故障。
软解除条件:①发动机关闭;②换挡杆未在前进挡;③ABS激活;④ASR激活;⑤ESC(ESP)激活;⑥车速低于25km/h;⑦ACC主控开关关闭;⑧定速巡航进入关闭状态。
3 结论
ADAS系统通过感知车身周围环境,采集并处理分析数据,能提前预警驾驶员,并在紧急情况下有效干预,能够显著增加汽车驾驶的舒适性和安全性。
ADAS系统是未来要探索的自动驾驶实现的前提条件,目前ADAS的驾驶操作主体是驾驶员本身,驾驶员仍然需要保持驾驶状态,以便随时接管车辆。未来自动驾驶的主体是系统,基于多传感器融合和深度学习,同时对技术和车辆性能要求更严格。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年4期)2022-03-07
卫星应用(2021年11期)2022-01-19
客车技术与研究(2019年2期)2019-11-26
汽车杂志(2018年6期)2018-06-25
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
