
原子钟性能对卫星导航系统定位精度的影响分析
2021-09-28 06:37廉吉庆
导航定位与授时 2021年5期
翟 浩,廉吉庆
(1.兰州空间技术物理研究所,兰州 730000;2.北京航空航天大学仪器科学与光电工程学院,北京 100083;3.真空技术与物理重点实验室,兰州 730000)
0 引言
目前,所有的全球卫星导航系统(Global Navigation Satellite System,GNSS)都有类似的架构,由美国全球定位系统(Global Positioning System,GPS)的设计者首创。GNSS是以时间测量为基础的系统,利用到达时间(Time of Arrival,TOA)测距的原理确定用户的位置。星载原子钟作为卫星导航系统上的时间基准与关键设备,是卫星导航系统的关键核心技术[1]。卫星装备高精度原子钟,并与地面控制段的原子钟同步,建立起导航卫星的精密时间,该精密时间也是基于精密测距定位技术的基础。主控站设有基准钟和守时钟,是卫星导航系统的时间基准,监测站也设有原子钟,与主控站原子钟同步,星载原子钟与地面控制段同步。
导航定位精度是卫星导航系统的主要技术指标。影响导航定位精度的因素很多,其中原子钟的性能指标和系统时间同步精度是重要影响因素之一,对此影响进行理论分析并给出GPS的工程验证结果,可以为GNSS的管理运行和卫星导航系统未来原子钟技术的发展与选择提供参考。

美国波音公司的研究人员针对影响URE的主要因素进行了定量分析,如图1所示[3-4]。主要的几种影响因素包括:地面控制段(Control Segment)误差、原子钟(Frequency Standard)误差、卫星群延迟(Space Vehicle Group Delay)误差、卫星加速度(Space Vehicle Acceleration)误差和星上频率综合器(Frequency Synthesizer)误差。其中频率综合器由一个10.23MHz的压控晶振(Voltage-Controlled Oscillator,VCO)和一个锁相环(Phase Locked Loop,PLL)电路组成,PLL将VCO输出的10.23MHz信号进行2329分频后,与铷钟输出的13.4MHz信号的3051分频通过鉴相锁定,实现导航卫星所用时钟信号的稳定输出。

图1 数据龄期为24h的GPS IIF用户定位误差范围分析
图1中数据龄期(Age of Data,AOD)为24h(根据GPS定位服务标准的定义,数据龄期等于控制段上次上传更新导航卫星信息以来的时间),原子钟的影响包含了稳定度和预报误差。从图1中可以看出,在数据龄期为24h的条件下,原子钟对定位精度的影响仅次于控制段的综合影响,是影响定位精度的最主要因素之一。显然,数据龄期越短,控制段对原子钟的运行模型建立得越精确,频率校准越及时。当数据龄期为0时,表示导航卫星信息刚刚更新,或可认为地面控制段与卫星的通信是实时的,即地面控制段钟组对星载钟进行实时同步,同步误差为控制段系统误差,星载钟对守时误差的贡献仅为自身随机噪声,即阿伦方差短期稳定度。目前,星载钟的实际短期稳定度通常优于1×10-11τ-1/2[6-7],时钟校正间隔按1s来算,误差优于1×10-11s,对定位误差的贡献为mm量级。因此,数据龄期的缩短能够降低原子钟对URE的影响。而随着数据龄期的延长,原子钟自主运行引入的随机噪声将越来越大,根据2020年GPS定位服务标准,目前GPS在正常运行状态下,当数据龄期为最大值时,原子钟对UERE的影响将成为最重要的因素[5]。
1 URE与卫星钟差
星载原子钟为导航卫星提供精准的时钟信号,用于系统时间计算,原子钟主要通过影响卫星钟差对定位精度产生影响。假定原子钟导致的卫星钟差为t,则导致的误差范围为t×c,c为光速,即钟差1ns,测距误差范围为0.3m,这样就可以把星载原子钟引入的钟差转换为定位误差。
星载原子钟的钟差如式(1)所示[8-9]
Δt=t-tX
=t0+At+1/2Dt2+Δ1(t)+Δ2(t)+ΔX(t)
(1)
式中,Δt为t时刻星钟的钟差;t0为t=0时的钟差;A为星载钟的准确度;D为星载钟的频率漂移率(老化率);Δ1(t)为星载钟的外部环境特性对钟误差的影响;Δ2(t)为星载钟的噪声造成的误差;ΔX(t)为相对论效应对原子钟的影响。在要求准确度和稳定度接近10-13量级的频标应用中,必须考虑相对论效应,对于空间应用来说尤其如此。
在理想情况下,初始钟差t0和初始准确度A由控制段的同步校准精度决定,星载钟的漂移率也可以由控制段精确计算和补偿,同时相对论效应也由控制段进行计算补偿,因此上述几种钟差理论上均能够由控制段进行计算补偿,即时间偏差补偿。但由于控制段对时间偏差的补偿无法做到完美,总会存在一定量的时间偏差;同时,星载钟的工作环境虽然相对稳定,但工作温度和空间磁场总是存在变化的,对星载钟输出频率产生的影响难以被忽略,因此时间偏差是不可避免的,这也直接导致了定位偏差的存在[3]。
另一方面,星载钟自身输出频率的随机噪声也会导致守时出现随机误差,即星钟的守时偏差也存在随机变化,星载钟对定位误差的影响是两方面作用的结果。
理论上,原子钟准确度和漂移率是可以通过地面控制段进行精确测量和补偿的。在对导航卫星系统进行误差分析时,通常将准确度和漂移率引起的误差算作地面控制段的修正误差,而相对论引起的误差会另做分析。因此对星载钟导致的定位误差进行分析时,仅考虑式(1)中Δ1(t)和Δ2(t),即星载钟对URE的影响考虑原子钟的随机噪声和环境因素引起的守时误差。
1.1 星载钟稳定度对钟差的影响
星载钟随机噪声引起的钟差噪声通常以阿伦方差的形式进行估算,在去除环境、漂移等因素的情况下,阿伦方差稳定度反映了星载钟的自身噪声情况[10-11]。在不考虑环境因素的前提下,根据星载钟稳定度得到的时间偏差量的方差可以表示为式(2)[12]
(2)

(3)

(4)
根据星载原子钟的噪声模型,当仅考虑其自身噪声时,主要包括随机噪声和闪烁噪声,其中随机噪声对稳定度的贡献量随采样时间τ呈τ-1/2的系数关系,而闪烁噪声对稳定度的贡献为常量。通常当τ小于1d时可认为原子钟噪声以自身随机噪声为主,当τ接近或大于1d时原子钟噪声以闪烁噪声为主。假定星载钟1s稳定度为σs,天稳为σd,由于原子钟随机噪声和闪烁噪声是相对独立的,因此可将原子钟的稳定度用σs和σd表示,式(4)可表示为式(5)
(5)
即童铠院士给出的原子钟稳定度对定位精度的影响计算公式[13]。
将原子钟稳定度代入式(4)中即可得出t时刻的时间偏移方差,图2和图3所示分别为波音公司研究人员建立的GPS IIF星载钟稳定度曲线和相应的守时误差(即秒信号相位差)[3],图4和图5所示分别为美国宇航公司研究人员建立的GPS原子钟稳定度与相应的等效定位误差均方根值[6](即时间误差乘以光速)。

图2 GPS-IIF星载原子钟样机稳定度指标(波音公司)

图3 原子钟噪声对钟差的影响(波音公司)

图4 GPS-IIF星载原子钟样机稳定度指标(宇航公司)

图5 原子钟噪声对定位精度的影响(宇航公司)
1.2 星载钟工作环境变化引起的守时误差
美国GPS卫星上星载钟工作环境温度变化范围为±3℃[4],由于GPS铷钟的整机温度系数非常小(GPS铷钟整机温度系数可达10-15/℃量级[14]),且铷钟工作底板增加了控温装置[15],因此温度变化对GPS铷钟的影响较小。而星载铯钟实测温度系数为3×10-14/℃左右,对钟差产生了相对较大的影响。对此,GPS采用了专门的卡尔曼滤波器对温度系数进行补偿。波音公司估计了在全部数据龄期范围内,GPS IIF星载铯钟受温度变化影响对守时产生的误差约为0.88ns,即URE为0.264m。另外,星载钟在轨工作时会工作在一定的磁场环境中,其中GPS铯钟最大工作磁场为1.64Gauss,GPS铷钟最大工作磁场为0.88Gauss,磁场变化也会引起原子钟守时误差。同样,GPS卫星也设计了专门的卡尔曼滤波器对磁场频移进行补偿。由于GPS铯钟设计了专门的磁场补偿电路,因此星上磁场变化主要影响的是铷钟。波音公司估计了在全部数据龄期范围内,GPS IIF星载铷钟受磁场变化影响对守时产生的误差约为0.14ns,该值即图6系统补偿曲线的标准差。

图6 控制段磁场补偿曲线
综上,GPS星载钟对URE的贡献主要包括3个方面:随机噪声(稳定度)、磁敏感度和温度系数,其中铯钟的贡献主要是随机噪声和温度系数,铷钟的主要贡献是随机噪声和磁敏感度,不同的因素可认为是相互独立的,对URE的贡献采用均方根方法进行组合。
2 原子钟稳定度估算与URE贡献
根据分析,原子钟稳定度是定位误差的重要影响因素之一。利用国际GNSS监测评估系统(international GNSS Monitoring & Assessment System,iGMAS)提供的钟差产品,能够实现对各大导航系统在轨原子钟性能的评估[16]。图7所示为利用iGMAS提供的最终钟差产品估算的GPS铷钟(G23(III)、G25(IIF))和北斗系统铷钟(C32、C33)及氢钟(C25、C26)去漂移后的阿伦方差稳定度数据。为了尽可能反映原子钟的随机噪声,选取原子钟输出频率无异常波动的连续1个月(20210122—20210220)运行数据进行计算,其中PRN编号为C33的北斗卫星铷钟在2021年2月12日进行准确度调整,频率准确度不连续,取20210113—20210211的30d数据。根据图7可知,去漂移后,2台北斗铷钟和2台北斗氢钟的稳定度近似,除G25铷钟外(G25铷钟存在周期性频率波动,影响了千秒到万秒的稳定度),5台原子钟在10000s以内的稳定度相当,在天稳定度方面,2台GPS铷钟的指标更好。
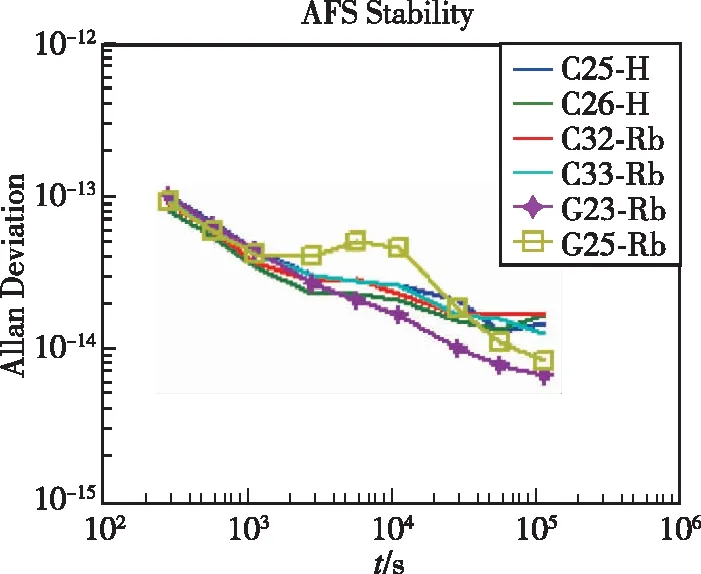
图7 原子钟稳定度(去漂移)
上述6台原子钟随机噪声产生的等效定位误差均方根值如图8所示。估算数据与原子钟稳定度对应,当数据龄期小于1h时,6台原子钟的噪声对定位误差的影响相当;当数据龄期为1d时,北斗原子钟噪声产生的误差均方根值约为0.5~0.6m,GPS原子钟约为0.2~0.3m。

图8 原子钟随机噪声引起的等效定位误差均方根值
值得注意的是,上述分析仅考虑了原子钟噪声的影响,实际上根据式(1),原子钟自身对钟差的主要影响除自身噪声外,还有频率漂移率,其影响主要体现在定位偏差上。根据iGMAS的钟差数据,上述2台北斗铷钟的频率漂移率指标均在1×10-13/d左右,2台北斗氢钟的频率漂移均小于5×10-15/d。因此,在实际工程应用中,氢钟与铷钟虽然具有相当的随机噪声,但控制段对星钟频率漂移率的估算和补偿无法做到完美的程度,频率漂移率的优势使氢钟比铷钟能够获得更好的钟差指标。
3 结论
本文针对原子钟性能与卫星导航定位精度的关系,从原理和GNSS的工程验证结果两方面进行了分析,结果表明:
1)星载原子钟对导航定位系统的误差影响包括两方面:偏差和随机误差,分别对应于原子钟的准确度和稳定度。
2)针对偏差,控制段可对星载原子钟进行同步校准、漂移率补偿以及工作温度和磁场变化补偿,但补偿和同步存在系统误差,无法完全消除偏差,且无法消除的偏差会直接引起定位的偏差。
3)对于星载原子钟稳定度引起的随机误差难以直接消除,目前最有效的方法仍是提升稳定度指标来减小该误差。根据分析,在不考虑其他误差的情况下,当数据龄期为1d,原子钟天稳定度为2×10-14时,由此因素引起的时钟误差小于2ns,即对URE的贡献小于0.6m;未来若将原子钟天稳定度提升至优于3×10-15,则稳定度引起的定位误差将在0.1m以内。
猜你喜欢
海外星云(2021年9期)2021-10-14
科学24小时(2021年3期)2021-03-12
电子产品世界(2016年1期)2016-03-07
天津农业科学(2015年7期)2015-09-07
天津农业科学(2015年9期)2015-09-02
建筑科学与工程学报(2014年4期)2015-02-03
科技创新导报(2014年11期)2014-11-05
