光纤布拉格光栅柔性传感器研究进展
2021-09-27 02:48:38徐小强宋子奇
应用光学 2021年5期
徐小强,杜 阳,冒 燕,宋子奇
(武汉理工大学 自动化学院,湖北 武汉 430070)
引言
目前的电类柔性传感器多采用电阻应变片、压电材料、电容、微机电系统(micro-electromechanical system,MEMS)等技术[1-2],其中传感元件的弹性模量比较大,且属于电类传感元件,易受电磁干扰,在潮湿、易燃、易爆等恶劣的工作环境中应用受到限制。随着新型柔性材料技术和光纤传感技术的同步发展,加快了生物医学和仿生机器人等热点学科对柔性传感器的需求,生物医学方面的临床手术操作、生理指标监测、病人关节矫正[3-5]以及仿生机器人的关节控制、皮肤感知、视觉伺服[6-7]均需要灵巧的柔性传感器。在此背景下,凭借光纤布拉格光栅(fiber Bragg grating,FBG)的独特性能优势[8]以及日新月异的先进制备工艺,基于光纤布拉格光栅柔性传感器的研究工作已经取得了很多研究成果。
基于光纤布拉格光栅柔性传感器(以下简称光纤柔性传感器),根据光纤光栅的安装方式,可分为嵌入式、粘贴式和悬空式[9];根据检测功能的不同,可分为压力传感器[10]、触觉传感器[11]、滑移传感器[12]、形状传感器[13]和加速度传感器[14];根据不同的柔性基体材料,可分为硅橡胶柔性传感器[15]、纺织编织品柔性传感器[16]和其他聚合物类柔性传感器[17]。
目前,柔性传感器在应用研究中还存在以下技术难题和瓶颈。1)温度与压力交叉敏感问题 在温度不稳定的环境中,光纤光栅在测形变、压力等时,光纤光栅会同时受到温度变化而引起的波长漂移,从而导致测量误差增加; 2)柔性材料与制备工艺问题 在特殊应用场合,需要大面积高密度FBG分布的柔性传感器,在同一根光纤上刻蚀数间距小、数量多、反射率低的弱光栅制备技术仍然是当前的前沿研究重点。另外,光纤光栅柔性传感器在长时间使用情况下,会使得光纤光栅发生老化[18]、机械强度下降以及传感器灵敏度减弱的问题。
本文综述了近十年兴起的以FBG传感元件和柔性材料为基体的柔性传感器的基本原理、制备技术、分类和应用的研究进展;归纳了硅橡胶类、纺织编织类和其他聚合物类柔性传感器;详细介绍了硅胶黏合法、机器编织法、3D打印法等常见的制备工艺,分析了不同制备工艺的优缺点;讨论了基于光纤光栅的柔性传感器在制备和研究应用上存在的问题;最后对柔性传感器的应用发展进行了总结和展望。
1 光纤光栅传感原理
光纤布拉格光栅是一种衍射光栅,通过紫外曝光法、相位掩膜法、在线成栅法、直接写入法等方法使得其内部的光纤纤芯发生折射的概率增高,从而形成周期性调制的一种无源滤波元件。当一束光射入光纤经过FBG时,只有波长满足Bragg条件的光波才会被反射,称为FBG的中心波长,其原理图如图1所示[19]。
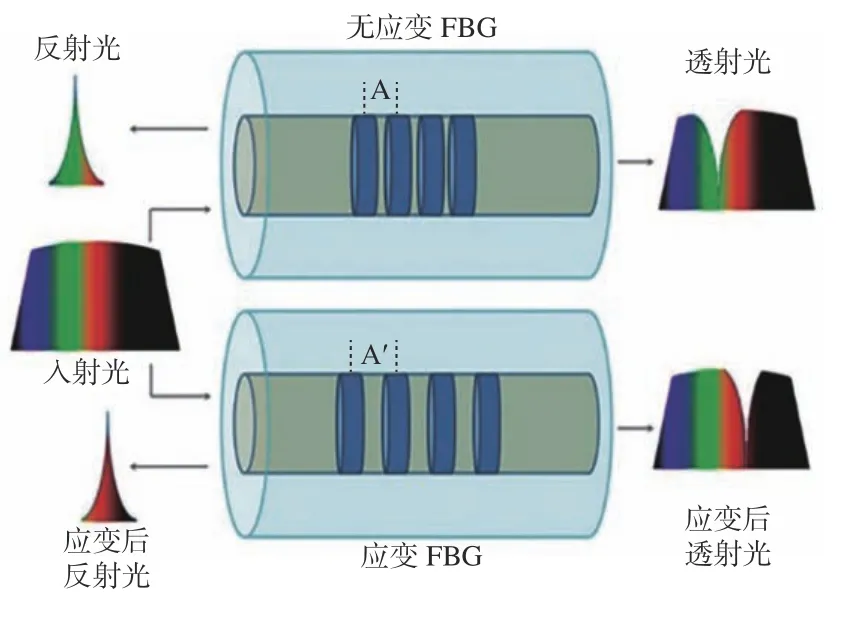
图1 光纤光栅传感器工作原理图及其应变响应[19]Fig.1 Schematic diagram of working principle of fiber Bragg grating sensor and it’s strain response
反射光的波长与光栅周期和纤芯的有效折射率[20]之间的关系可表示为

式中: λB表示光纤光栅的中心波长;neff表示光纤纤芯的有效折射率; Λ表示光纤光栅的周期。影响FBG传感的物理量为应力和温度,外界应力和热膨胀效应会使光栅周期发生变化,弹光效应和热光效应会使光纤纤芯的有效折射率发生变化[21],当温度和应力同时变化时,FBG的中心波长用公式可表示为

式中:α、ξ和Pe分别为FBG的热膨胀系数、热光系数和有效弹光系数; ∆ε 和 ∆T为光纤轴向应变和温度变化。当温度恒定不变时,光纤光栅中心波长变化与应变有关,有效弹光系数为常数,且不同光纤材料的有效弹光系数不同。
2 不同基底材料的FBG柔性传感器
柔性基底材料的选择是FBG柔性传感器的设计重点,研究人员基于应用背景选择了不同的柔性材料作为基底对FBG进行封装,通过单根光纤、多根光纤平行或阵列的耦合方式制作柔性传感器,并在实验中对比裸FBG和柔性基底封装后的FBG在灵敏度、压力应变等方面的性能。根据柔性材料的特质,可用于曲率、压力、触觉感知等方面的测量。
2.1 硅橡胶基底FBG柔性传感器
硅橡胶因其具备耐高温[22]、耐低温、可拉伸延展等特点,是目前大多数柔性传感器可选择的柔性基底材料。Jin-Seok Heo等人[23]利用硅橡胶设计了一种基于FBG的柔性压力阵列传感器,具有与人体皮肤最大空间分辨率和最大受力相一致的触觉范围。为了探究光纤FBG埋入仿生体中的传感性能,王彦等人[24]制备了一种将FBG埋入硅胶基体中的柔性传感器,测试对比了FBG柔性传感器和裸FBG传感器对温度和应变响应性能,实验中构造桥梁模型来模拟车辆通行,结果表明检测车辆通行载荷信号能力、响应速度均强于裸FBG,系统整体稳定性更高。A.E.James等人[25]将FBG离心嵌入柔性硅胶中,但是发现单纯的硅胶类柔性材料并不适合作为曲率传感器的柔性基底,硅胶类易变形的特性,会导致传感器测量重复性差及不稳定等问题。但在之后其他团队的研究中发现,加入其他材料的硅胶类复合柔性基底可以得到较好的实验结果。张雄雄等人[26]将硅胶胶合在聚氯乙烯基体上,将光栅嵌入硅胶基体与聚氯乙烯贴合形成曲率传感器,实现了材料可以被多次拉伸并恢复到原始形状后而不发生变形。
针对传统传感器在对人体的呼吸、心脏跳动、血压等进行准确、无创和长期检测中无法满足要求的问题,George T.Kanellos等人[15]设计了带有丙烯酸酯涂层的FBG(长度为d)嵌入聚二甲基硅氧烷的压力传感器。将大面积的传感皮肤(如图2(a)所示)模块化为多个传感单元(如图2(b)所示)。采用多路复用光纤光栅阵列结构实现外力多点监测,并可调整相邻光纤之间的间距D以实现不同的空间分辨率。Daniela Lo Presti等人[27]依据胸壁位移可改变光纤光栅长度的原理设计出了一种基于FBG的监测呼吸和心脏跳动的柔性可穿戴系统。
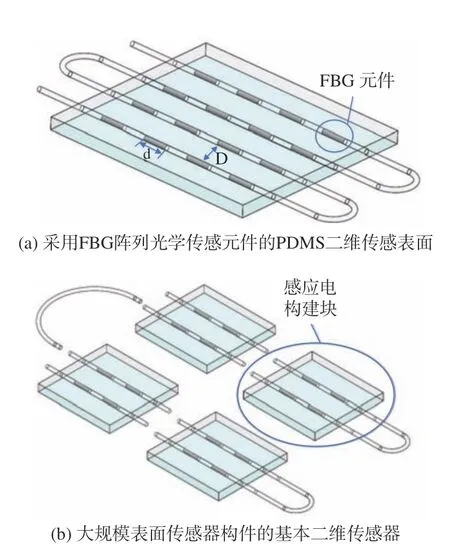
图2 传感模型[15]Fig.2 Sensing model
为了便携、耐磨地实现精确监测人体呼吸和心脏跳动等行为,Chiara Romano等人[28]将FBG柔性传感器应用于监测射箭运动员心率和呼吸频率中,运用运动捕捉系统对运动员胸壁进行生物力学分析,确定传感器最佳位置,根据运动员实际运动时不同阶段的反馈数据进行相关分析,评估了系统对监测心跳和呼吸频率的可行性,如图3(b)所示。
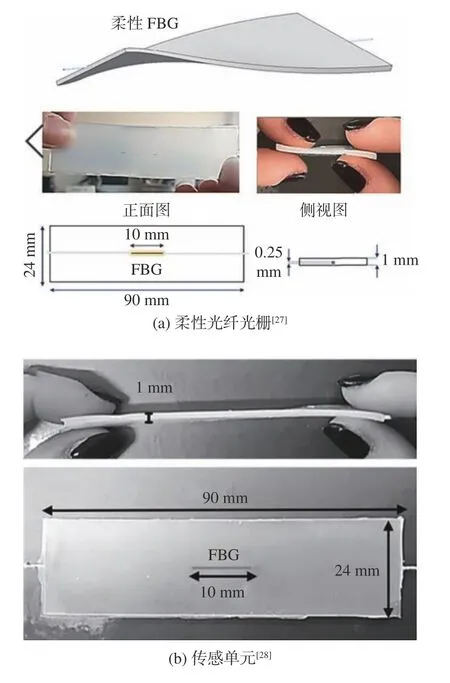
图3 传感器实物图Fig.3 Sensor physical model
在软体机器人、飞行器以及智能穿戴设备中实现曲率测量和形状感知尤为重要,为了解决曲率测量难题,张雄雄等人[26]设计了一种适用于复杂机构的柔性曲率测量传感器,由封装了FBG的硅胶基体与聚氯乙烯薄片贴合而形成。通过实验分析了曲率传感器反射谱特征及其随标定块曲率变化规律,讨论了曲率变化和波长偏移的关系以及传感器灵敏度与光纤嵌入硅胶基体深度的关系。随着嵌入深度的增加,传感器灵敏度逐渐增大,且具有较好的重复性;为了实现形状重构,孙广开等人[29]采用线性插值算法得出FBG中心波长漂移量与被测物体曲率之间的关系曲线,依据曲线和插值算法来重构物体的变形形状。
2.2 纺织基底FBG柔性传感器
除了基于硅橡胶的光纤光栅柔性传感器,纺织编织类柔性传感器也是当前研究的热点,智能穿戴设备正逐渐被人们所追崇,杨昆团队[30]设计了以针织复合组织为基础,通过采用提花组织和空气层组织相结合的针织结构,嵌入光纤光栅形成的织物脉搏传感器。使用电脑横机对线密度为30 tex的湖蓝色和绿色棉纱进行编织,并确定传感器放置位置。将指夹式红外脉搏传感器与光纤光栅传感织物进行对比试验。结果表明,光纤光栅传感器织物可以低失真度地检测脉搏波,其整体光滑柔韧,设计简单,穿着舒适性高,且织物对光纤具有保护作用。
因可穿戴智能服饰柔软轻便的特点,可用于生物医学以及人体生命体征监测,D.Lo Presti团队[31]设计了装备有12个光纤光栅传感器(正面和背面各6个)的可穿戴智能服饰,用于呼吸速率的监测,通过捕捉光纤光栅的变化数据来定位呼吸时胸壁产生的位移。FBGs安装位置如图4所示,并在2名健康志愿者身上进行站立和仰卧测试,探究了传感器位置对输出峰值振幅的影响以及对呼吸频率监测的精确程度。所测得的呼吸频率与实际保持很好的一致性,评估了该智能服饰用于呼吸频率监测的可行性。
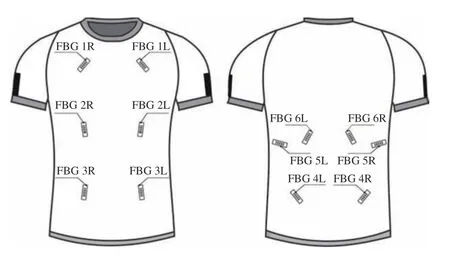
图4 智能纺织品上的传感器配置[31]Fig.4 Sensor configuration on intelligent textile
纺织物加工制造简单,成本低且易于穿着和整理,光纤光栅体积小,灵敏度高,将两者创新性地结合起来,在便携性和易更换的层面上更优于硅橡胶和其他聚合物,同时又保证了传感器的稳定性。在运动科学,人体生命体征监测,临床医疗等领域,将纺织物和光纤光栅结合的设计理念有助于智能服饰、智能医疗设备的生产制造,更好地服务于人们的生产生活。
2.3 其他聚合物基底FBG柔性传感器
不同的复合材料各自拥有着不同的性能,通过将各种材料进行组合,可以实现材料之间性能缺陷的互补,扩大光纤光栅传感器的应用范围,展现出光纤光栅柔性传感器更大的发展潜力。为了使传感器能够适用于恶劣环境,如高温、电磁干扰、腐蚀等,Alexandre团队[17]采用涂层技术将光纤光栅嵌入到柔性PVC材料中,设计了一种夹层结构,如图5所示。柔性PVC材料为中间层,负责与光纤的粘附,保持光纤稳定;第1层和第3层材料负责保护光纤,以免受到损坏。测试了该结构和尺寸的稳定性和灵活性,对传感器的机械响应和热响应进行了表征,可直接应用于比较恶劣的检测环境。
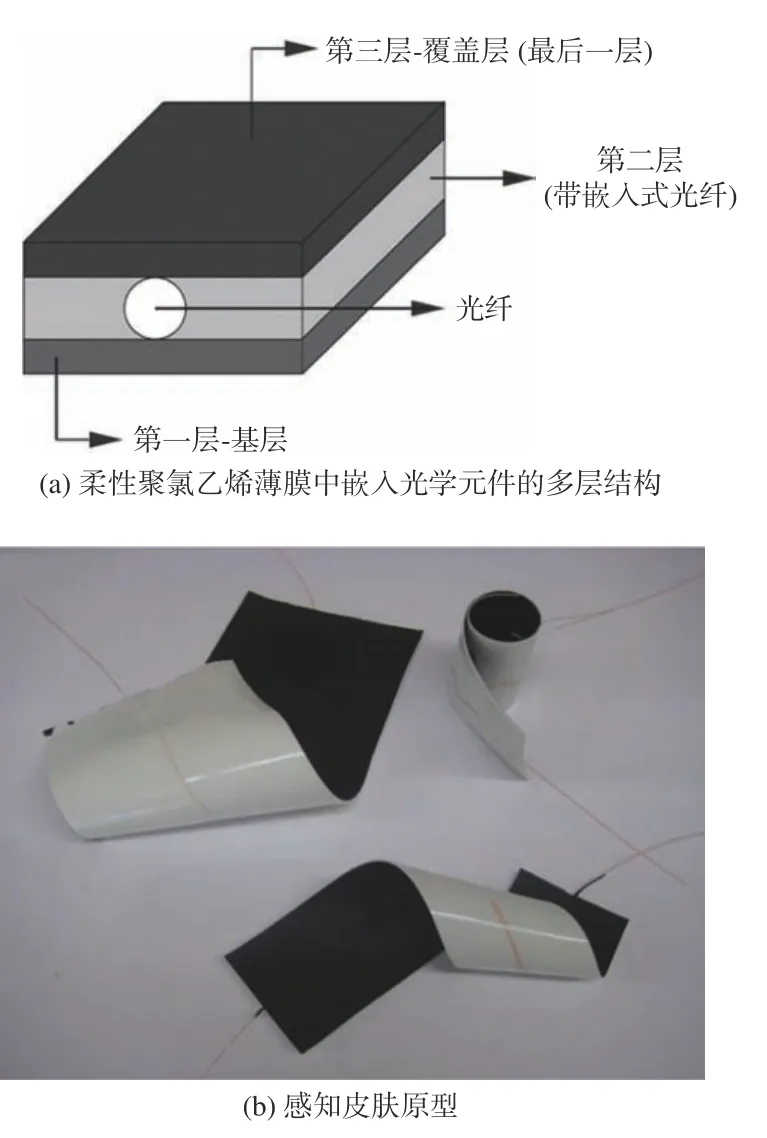
图5 传感器结构与实物图[17]Fig.5 Sensor structure model and physical picture
随着软体机器人和智能可穿戴设备的需求日益增加,柔性曲率传感器在这些领域扮演了越来越重要的角色,曲道明等人[32]提出了一种植入光纤光栅敏感元件的聚酰亚胺薄膜柔性曲率传感器,如图6所示。采用聚酰亚胺薄膜封装FBG,能够解决将FBG直接埋入硅胶等柔性材料引发的二者杨氏模量不匹配问题,同时提高了测量灵敏度。
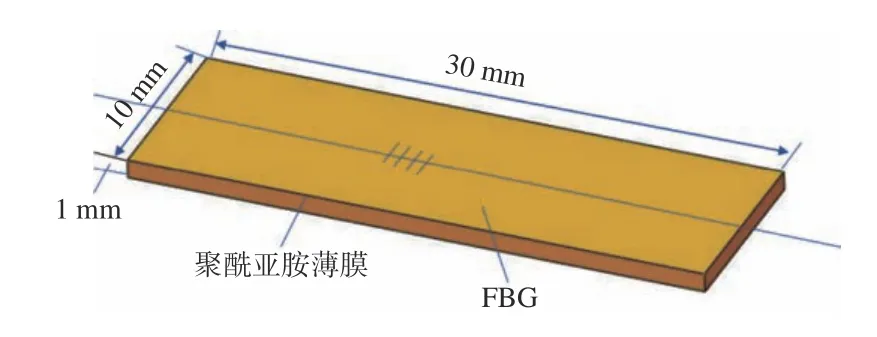
图6 光纤光栅聚酰亚胺薄膜柔性曲率传感器[32]Fig.6 Flexible curvature sensor of fiber grating polyimide thin film
3 柔性传感器的制备工艺
3.1 灌胶与粘合
制备工艺主要采用灌胶和粘合的方式[15,22]。灌胶工艺是将光纤嵌入到准备好的模具中,模具是由模块化的单元拼装起来的,主要目的是为了方便光纤的放置和柔性传感器的制作。在模具的侧边,采用分合式结构,将模块分为上下两个部分,并在模块上刻制了半圆形凹槽,光纤将置于此处,凹槽的半径要略大于光纤半径。其中模具镂空的部分即为灌胶区,将硅橡胶按照配比调制好,倒入其中,静置一定时间后,直至灌胶区变成固体,确保光纤在凹槽中不会移动。粘合工艺则更为简单,只需将柔性材料两贴合面均匀涂抹胶水,将光纤固定在需要的位置,轻轻按压柔性材料保证两面完美粘附无气泡,后静置等待胶水凝固,即可完成制备。
3.2 机器编织
纺织材料具有柔软、低模量、易变形等属性,用其制成的柔性传感器具有良好的柔韧性、延展性,而且结构形式灵活多样,并可根据测量条件的需求进行设计,使检测过程更加方便,将其与FBG光纤光栅结合具备着广泛的应用前景[16]。
Yang Xiufeng等人[33]报道了一种制作简单、成本低、灵敏度高且可用于心跳和呼吸监测的纺织光纤微弯传感器,整个纺织物柔软、穿戴舒适。此外,杨昆团队[34]选择聚合物光纤作为衬纬纱线,前梳进行经斜垫纱运动,后梳进行经绒垫纱运动,光纤嵌入形状选择半圆与半圆镜像相切的图案,使用经编小样机编织了传感织物。
机器编织的方法虽不适用于工业中柔性传感器的制备,但其在智能服饰领域展现了更多的价值。随着生活品质的提升,人们对智能可穿戴设备需求更高,同时,现代机器编织技术成熟,可以按照人们的意愿去高效率低成本地设计各种产品。
3.3 3D打印
3D打印技术依靠计算机程序控制来实现高精度、高效率的实物制作,打破了传统的机械工艺加工技术,实现部件的一体化成型,成本低研发周期短,大大提高了生产设计效率,相较于机器编织和灌胶工艺,其制作方式更加简便与自由。Hao Zhongyang团队[35]将光纤光栅传感器和3D打印技术集成应用,设计出了一种智能鞋垫,可实现人类步态姿势的检测,如图7所示。在打印完成一半时暂停,将光纤光栅传感器放置其中,然后继续完成打印,并对该鞋垫进行实际的站立和行走测试。实际的行走测试结果和预期基本保持一致,验证了3D打印技术的可行性。
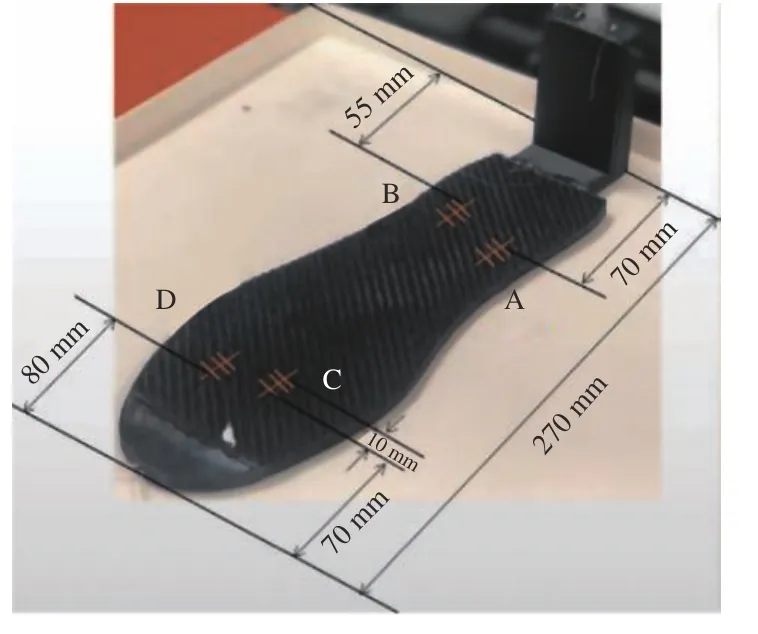
图7 3D打印鞋垫(A、B、C、D 4个点对应4个FBG传感器)[35]Fig.7 3D printed insole (four points A, B, C and D correspond to four FBG sensors)
由于3D打印机可以使用不同的打印材料,Hong Chengyu等人[36]采用材料挤压制造方法,将FBG利用3D打印技术嵌入到聚乳酸中,制作了用于测量垂直压力的传感器。通过计算机对打印器件建模,原材料从喷嘴中挤压出来,并层层堆叠,以实现所需的结构模型。Michal G.Zubel等人[37]将聚合物光纤光栅以3D打印的方式嵌入到不同的材料中,形成传感贴片。传感贴片外壳使用3D打印机打印,在其中间预留了光纤的嵌入通道。当打印到中轴线覆盖层沉积之前即嵌入通道最深处时,打印暂停,并在通道底部和光纤上涂敷胶水,将光纤嵌入其中,待胶水固化且光纤固定之后,继续打印,完成整个传感贴片的制备。
4 各类柔性传感器特性分析
通过分析FBG柔性传感器各类传感器在材质、结构等方面的不同,可以得出目前各类传感器在不同应用场景中的结构及性能等,如表1所示,为之后的研究提供了参考。
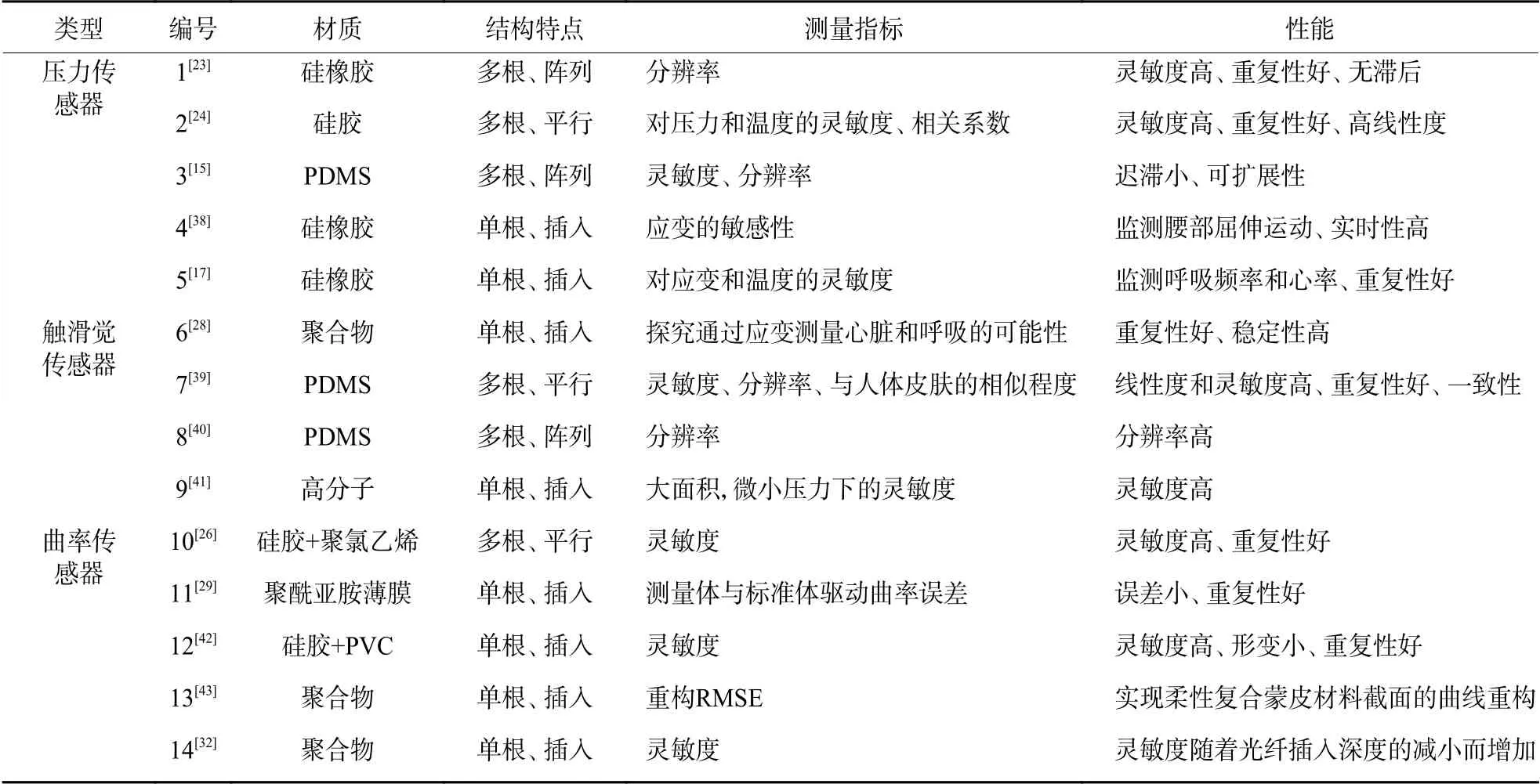
表1 不同类别柔性传感器特性对比Table 1 Characteristics comparison of different types of flexible sensors
可见,研究者们大多关注其灵敏度和分辨率,并且要求其具有较高的重复性。同时,光纤光栅在柔性基底中不同的排列方式表明FBG对结构的限制很小,可以根据实际需要进行设计,极大地增加了FBG的应用范围。而对于不同类的传感器,材料的选择则有所侧重。压力传感器大多采用硅胶类材料作为基底,触滑觉传感器侧重于更类似于人体皮肤类的材料,曲率传感器的选择范围最大,可以根据其不同的实验要求,尝试各种不同的基底材料。
5 未来研究内容
1)人工智能算法融合
光纤柔性传感器与单个FBG相比,其信号处理算法更复杂。随着模式识别以及人工智能研究的兴起,使用机器学习算法快速准确重建测量软表面形状[41]、利用机器学习工具高斯过程回归方法处理光纤布拉格光栅的温度测量信号[44],这为解决光纤柔性传感器的信号处理难题提供了新思路。利用Adam优化算法,训练卷积神经网络模型识别超弱FBG传感信号[45];将多通道FBG传感器和人工神经网络组成状态监测系统[46],都将是未来人工智能算法与柔性传感器融合发展的新方向。
2)一次成型加工技术
光纤柔性传感器的制作包含3个工艺,分别是光纤拉丝、光栅刻蚀和柔性基体结合。为了克服焊接形成光纤光栅串的不足,如效率低、光栅抗拉强度低等问题,国内外极少数单位已开展在线制作光纤光栅技术的研究,可以制备光栅中心波长一致性、反射率一致性和光栅谱型一致性均较好的弱光栅阵列。针对交叉敏感问题,需进一步探索双芯、多芯高密度光栅阵列在线制备方法。
3)进一步扩展研究领域
目前,FBG柔性传感器的应用场景包含生命体征监测和智能穿戴设备。此外,FBG柔性传感器还应用于软体机器人,使其在触觉传感[47]、滑移检测、弯曲度感知[29]等方面表现出更加精确快速的响应性能;在智能交通领域,则应用于车辆密度和速度的监测[48]等。光纤光栅柔性传感器凭借其独特的性能和优势,未来对于此类柔性传感器的应用范围将进一步扩大,正在向多领域多方向发展,潜力巨大。
6 结论
本文对近几年来基于光纤布拉格光栅柔性传感器的研究成果进行了总结性介绍,对比分析了柔性传感器的种类和制作工艺。由于柔性传感器的研究涉及到材料、光学和信息处理等多学科,目前的研究工作还处于初级阶段,离实际应用还存在不小距离,主要表现在光纤光栅成本高、光纤任意弯曲影响大、传感器制作工艺复杂、光源与解调模块微型化难度大等方面。近年来,国内外高校和科研院的研究人员对柔性传感器的研究表现出了浓厚的兴趣,尤其在生物医学和智能机器人等热点研究领域的应用前景更为广阔,因此对基于光纤布拉格光栅柔性传感器的材料选取、工艺制作和信号处理等方面进行深入研究具有重要意义。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
今日农业(2022年15期)2022-09-20 06:54:16
石油沥青(2021年5期)2021-12-02 03:21:18
文化创新比较研究(2020年7期)2021-01-13 09:10:48
电子制作(2018年23期)2018-12-26 01:01:26
高师理科学刊(2016年8期)2016-06-15 20:27:46
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:41
中国舰船研究(2014年6期)2014-05-14 06:45:21
物理与工程(2014年4期)2014-02-27 11:23:08