
新型机载激光雷达在地形测绘中的应用研究
2021-09-27 03:11陈海佳李景坛2
经纬天地 2021年4期
罗 胜 陈海佳 李景坛2,
(1.广州中海达卫星导航技术股份有限公司,广东 广州 510000;2.武汉大学,湖北 武汉 430000;3.武汉海达数云技术有限公司,湖北 武汉 430200)
0.引言
地表含有丰富的地理要素信息,这些信息可以为人类活动提供依据和指导。地形测绘可以获取地表的位置和高程信息,并生成所需的测绘产品[1]。传统地形测绘一般先采用经纬仪、全站仪等仪器获取地物的坐标信息,再通过内业进行数据处理和成果生产,该方法人工成本大、成果产出效率低。随着数字时代的到来,激光雷达测量系统逐渐应用到了地形测绘任务中,其集成了三维扫描、同步控制、定位定姿等技术,作为一种新的手段,可以高效率、高精度地获取地表的三维空间信息。
随着光电技术的发展与应用需求的推动,国内外已涌现出一大批致力于高精测绘领域的激光雷达厂商和产品,如,奥地利Riegl公司的VUX系列激光雷达、中海达公司的智喙系列激光雷达、北科天绘公司的云雀激光雷达等。目前广泛应用于测绘领域的机载激光雷达产品的点频一般在每秒50万点左右,如,VUX-1UVA、Sky-Lar云雀等,测量距离主要为中低空测距,一般在1000m以下。这些激光雷达在地形测绘应用中存在以下问题:(1)点云密度较低,会导致植被覆盖区域下的地面点数量较少,以致无法更精确地构建地面模型,且建筑特征点如房角等位置可能缺少点云,在进行DLG绘制时,需要通过拟合得到这些特征点,导致DLG的成图精度降低;(2)激光测程较短,会导致在地形落差较大区域需划分更多区块完成采集作业,从而降低作业效率,且不同区块的点云成果后期需要进行拼接处理,拼接误差也会影响点云的精度。
针对这些问题,具备超百万高点频、超千米长测距的新型激光雷达近几年成为研发热点,本文主要基于市场已有的新型激光雷达产品探讨其在地形测绘中的应用技术流程和优势。
1.关键技术及流程
1.1 机载激光雷达技术
新型机载激光雷达系统的基础技术与传统的相同,都是采用主动测量的方式,系统通常搭载在各种飞行器上,比如,无人机、直升机等,由激光测距系统、定位定姿系统和同步控制系统等部分组成[2],为获取地表的地形和地物的三维信息提供了一种新的方式,具有自动化程度高、受天气因素影响小、数据处理和成果生产时间短、精度高等特点[3]。
在测距技术方面,由于脉冲测距仪可以发出很强的激光,测量距离远、测距能力强,因此,新型机载激光雷达也采用脉冲测距模式,其原理是用激光器向目标发射光脉冲,光到达目标后部分被反射,根据光从发出到返回接收机的时间,可以推算出测距仪和目标之间的距离[4],公式如式(1)、式(2)所示。得到距离信息后,再结合定位定姿系统测量飞机姿态和激光束的扫描角度,利用空间极坐标计算目标的三维坐标。

式(1)中,ρ为测距仪与目标之间的几何距离;t为激光束的往返时间;c为光速。式(2)中,Δρ为距离分辨率;Δt为测时分辨率;c为光速。
1.2 地形测绘技术流程
基于新型机载激光雷达测量系统进行地形测绘的技术流程(如图1所示),主要包括飞行准备阶段、数据采集阶段、数据处理阶段和成果生产阶段。
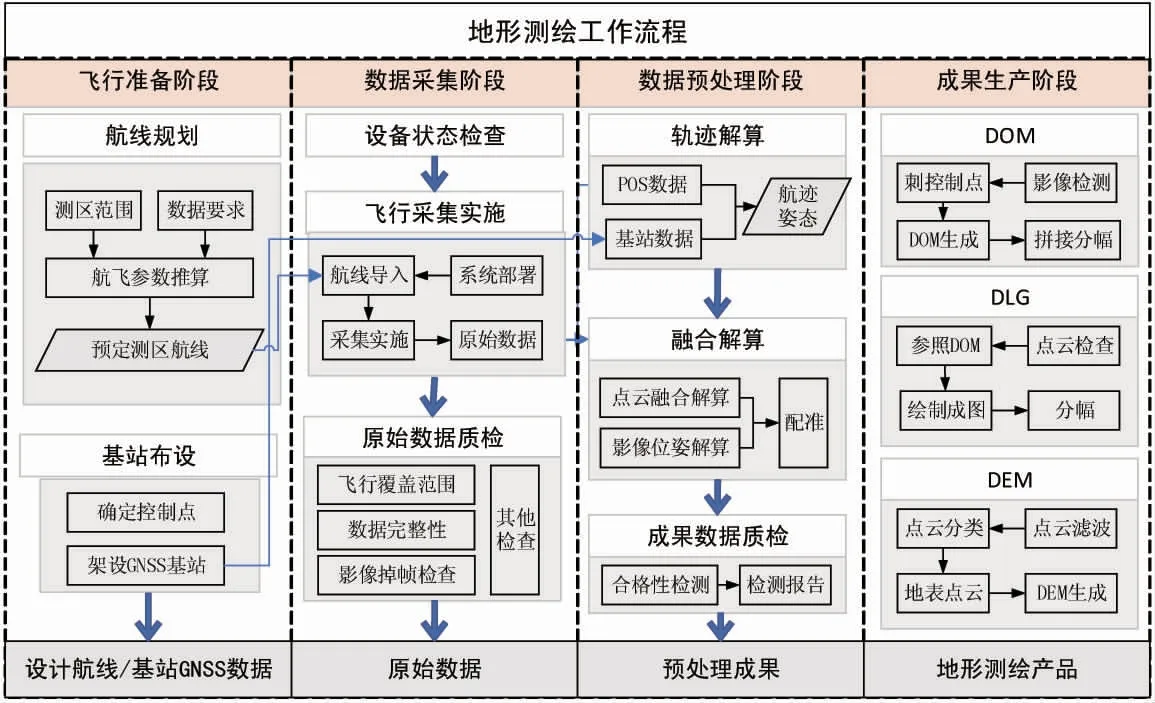
图1 基于机载LiDAR的地形测绘工作流程图
1.2.1 飞行准备
飞行准备阶段包括航线规划和基站布设两部分工作。进行航线规划前需先收集测区的相关资料数据,并派遣技术人员实地勘察测区的情况。了解测区整体状况后,准备所需软硬件设备,然后根据测区范围设计飞行航线。航线设计时需考虑以下因素:(1)飞行速度和高度;(2)飞机的续航时间;(3)测区的地势起伏;(4)航向与旁向重叠度等。
进行基站布设时,一般将基站架设在空旷、无遮挡、无信号干扰的开阔区域的已知控制点上,以保证接收到良好的卫星信号。为了防止某一个基站数据采集不正常,一般架设双基站。测区条件无法架设基站时,可以采用CORS站的静态数据。为保证数据的质量与精度,测区应处于基站或CORS站的覆盖范围内。
新型机载激光雷达由于具备长测距的特性,因此可适用于落差起伏较大的山地区域,在进行航线规划时,可以减少作业区块的划分,进而提升效率和精度。
1.2.2 数据采集
数据采集阶段包括设备状态检查、飞行采集实施和原始数据质检三个部分工作。设备状态检查内容通常包括安装是否完整、设备之间连接是否无误、存储空间是否足够等[5]。之后将设计好的航线导入飞控软件中进行数据采集工作。数据采集过程中要全程监控设备状态,以保证整个飞行架次的安全。采集完成后得到各个传感器的数据,包括激光测距数据、GNSS数据、惯导数据、同步时间数据等。之后对原始数据进行初步质检,以判断飞行范围、关键数据是否完整等,根据结果决策是否进行补测或下一步工作。
1.2.3 数据预处理
点云数据预处理主要包括轨迹解算、融合解算、数据质检等工作。轨迹解算的目的是得到高精度的姿态数据,其主要利用基站数据和POS数据通过数据处理和IE解算完成。该过程可通过专业软件辅助完成解算,如,HGO数据处理软件、Inertial Explorer软件。融合解算的目的是将扫描系统采集的原始距离数据和轨迹解算得到的高精度姿态数据等进行融合处理,生成目标地物的空间三维坐标点云文件,以便进行后续点云滤波、点云分类、点云渲染以及成果生产等。融合解算主要由数据融合软件完成。数据预处理完成后进行数据的合格性检测工作,以确保后续成果的精度。
1.2.4 成果生产
地形测绘的产品成果包括但不限于4D产品,在测绘成果的生产方面,目前已有成熟的商业软件可辅助内业工作者完成产品生产。在进行DOM生产时,通常包括影像检查、刺控制点、空三加密、拼接分幅等关键步骤;DEM的生产相对更加自动化,首先人工干预精细分类以获取准确的地表点云数据,然后基于地表点数据,通过软件自动生成DEM成果及等高线成果;DLG的生产需要投入较多的人工成本,一般在商业软件中参照矢量图标准用DOM表达出DLG数据。
2.实验与分析
本文选取两个测区进行实验,其中,区域一地物要素齐全,通过与传统机载激光雷达的数据成果进行对比分析,以验证新型激光雷达高点频的优势;区域二地形落差较大,以验证新型激光雷达长测距的优势。
2.1 测区概况
实验区域一位于华中某平原区域,测区为平地地形,南北长度1.3km,东西长度1.2km,地势起伏较小,测区内高低最大落差不超过30m。该区域内包含建筑、植被、道路、水系、农田、裸土等丰富的地理要素。
实验区域二位于西北某高原区域,测区内高低落差大于300m,面积为2.54km2,起飞海拔大于3300m。该区域包含山区、河流、植被和少量建筑。实验区域图像(如图2所示):
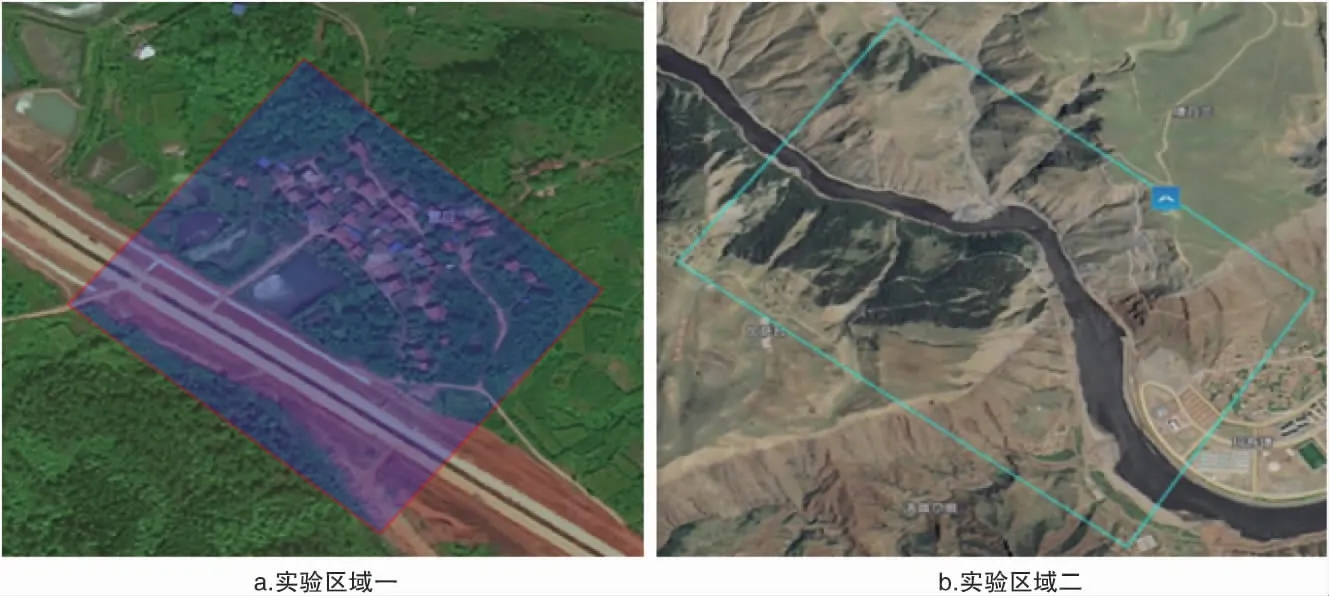
图2 实验区域图
2.2 仪器设备
经市场调研,目前常用的测绘型激光雷达中80%集成自RIEGL激光器,其中VUX-1UVA型号激光器在测绘领域较为常用,国内集成该激光器的代表产品有中海达ARS1000、华测导航AS-900HL、南方测绘SZT-R1000、数字绿土LiAir 1000等产品。对于新型激光雷达产品,目前正朝着超千米测距、超百万点频方向发展,代表产品有RIEGL的VUX-120、VUX-240、中海达智喙PM-1500。本实验以同时满足高点频、长测距、重量轻等为主要选择标准,同时考虑指标参数、技术成熟度、系统集成度等因素,最终选取智喙PM-1500和ARS1000进行相关实验。设备主要参数(如表1所示)。此外,测区一无人机平台选择L150六旋翼无人机,测区二选择蜂虎固定翼无人机。
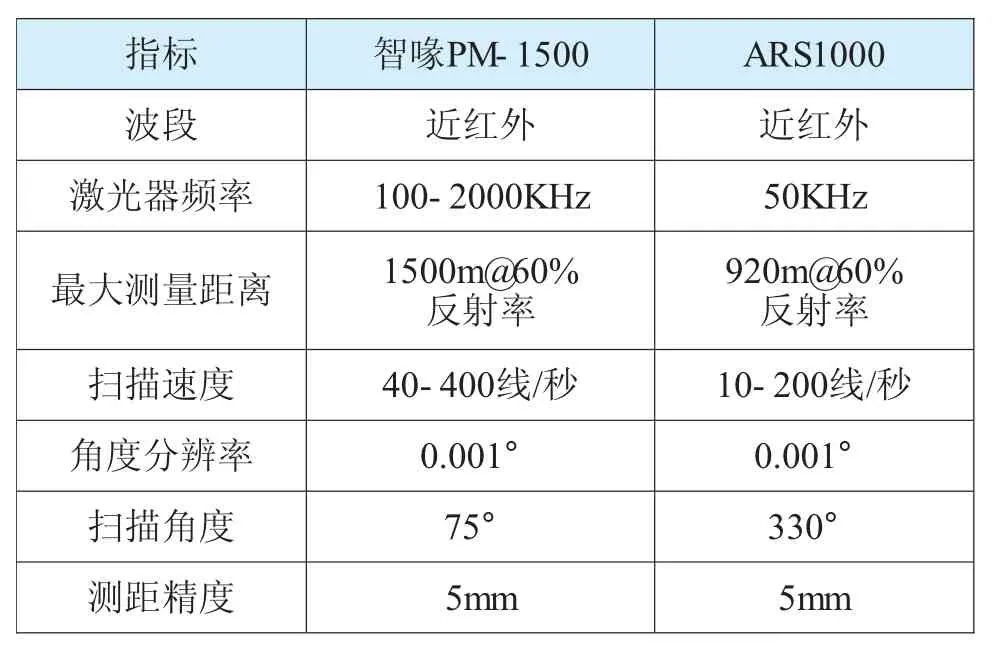
表1 实验设备参数表

2.3 数据采集与处理
实验采用的坐标系为WGS84坐标系,高程基准为大地高。测区一进行智喙PM-1500与ARS1000的对比实验,为保证实验准确度,不同机载激光雷达测量系统在数据采集时采用的飞行航线和飞行参数相同,即飞行高度为90m,航线间距35m;测区二采用智喙PM-1500进行数据采集,飞行高度为300m,航线间距150m。
无人机的起降应选择空旷、无树木和建筑遮挡、无杂草树枝等易吹起物、地形平坦的区域,且起降时应远离密集人群区域。智喙PM-1500机载测量系统在不同区域进行空中作业的示意图(如图3所示):

图3 机载激光雷达系统空中作业图
2.4 实验分析
2.4.1 评价指标
机载激光雷达系统数据质量的评价标准有十几种,如,最大高程误差、高程中误差、平面位置中误差、航带误差等,本文选取下列评价指标进行分析,下面对其进行简要说明:
(1)点云密度。点云密度用于描述单位面积上激光点的平均数量,可以用来评价点云质量。
(2)高程中误差。高程中误差用于评价点云高程与其真实高程之间的差距,利用测区验证点进行评定,公式如式(3)所示:
式(3)中,ZRMSE为高程中误差;Zi为第i个验证激光点的内插高程;n为验证点个数为第i个验证点的实测高程。
(3)航带误差。航带误差用于评价相邻航带点云数据的位置误差,通过不同航带重叠区域的点云进行评定。公式如式(4)所示:

式(4)中,AXY为航带误差;AX为X方向航带误差;AY为Y方向航带误差。
(4)DLG平面标准差。DLG平面标准差用于评价点云的平面位置与真值之间的差别,利用测区验证点进行评定,公式如式(5)所示:

式(5)中,dxy为平面标准差;dx为X方向标准差;dy为Y方向标准差。
2.4.2 测区一实验分析
为验证相关指标精度,前期在测区一均匀采集了29个高精度验证点。对数据进行处理及成果生产后,通过专业处理软件生成各指标的误差报告,得到各指标的误差(如表2所示)。横向对比分析,PM-1500的上述各项误差均小于5cm,满足1∶500比例尺测图需求,ARS1000的平面标准差大于5cm;纵向对比分析,PM-1500的高程和平面位置精度均优于ARS1000,ARS1000的航带误差优于PM1500的航带误差8mm,相差不大。通过上述分析:可以证实新型激光雷达可以提高点云高程和平面的精度。
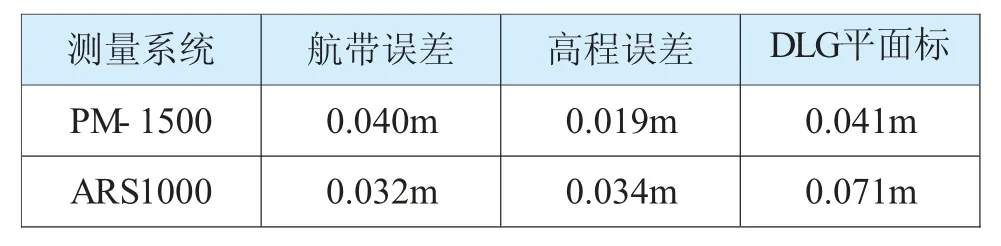
表2 不同设备各项误差对比表
两个设备获取的部分点云图像(如图4所示),可以直观看出:整体上PM-1500的点云更密,且建筑关键特征位置和建筑立面上点云数量较多,地面上基本不存在空洞区域对建筑、道路、植被、去除植被类后的地表的点云密度进行定量分析,选取不同设备获取的点云图像上同一区域的点云,计算选框内的点云密度(如表3所示),显然,PM-1500的点云密度是ARS1000的2倍以上。点云对比图(如图5所示):

表3 不同地物要素同区域每平方米点云数量
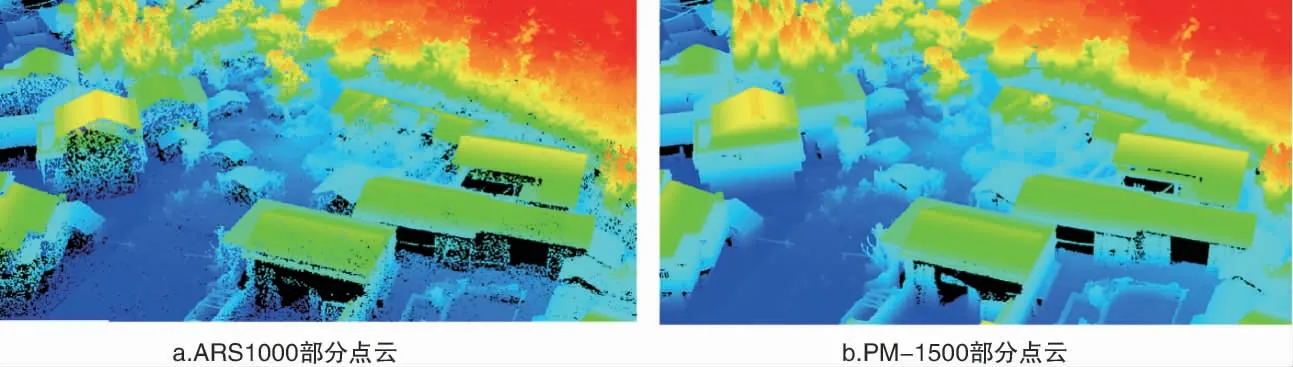
图4 不同激光雷达点云对比图
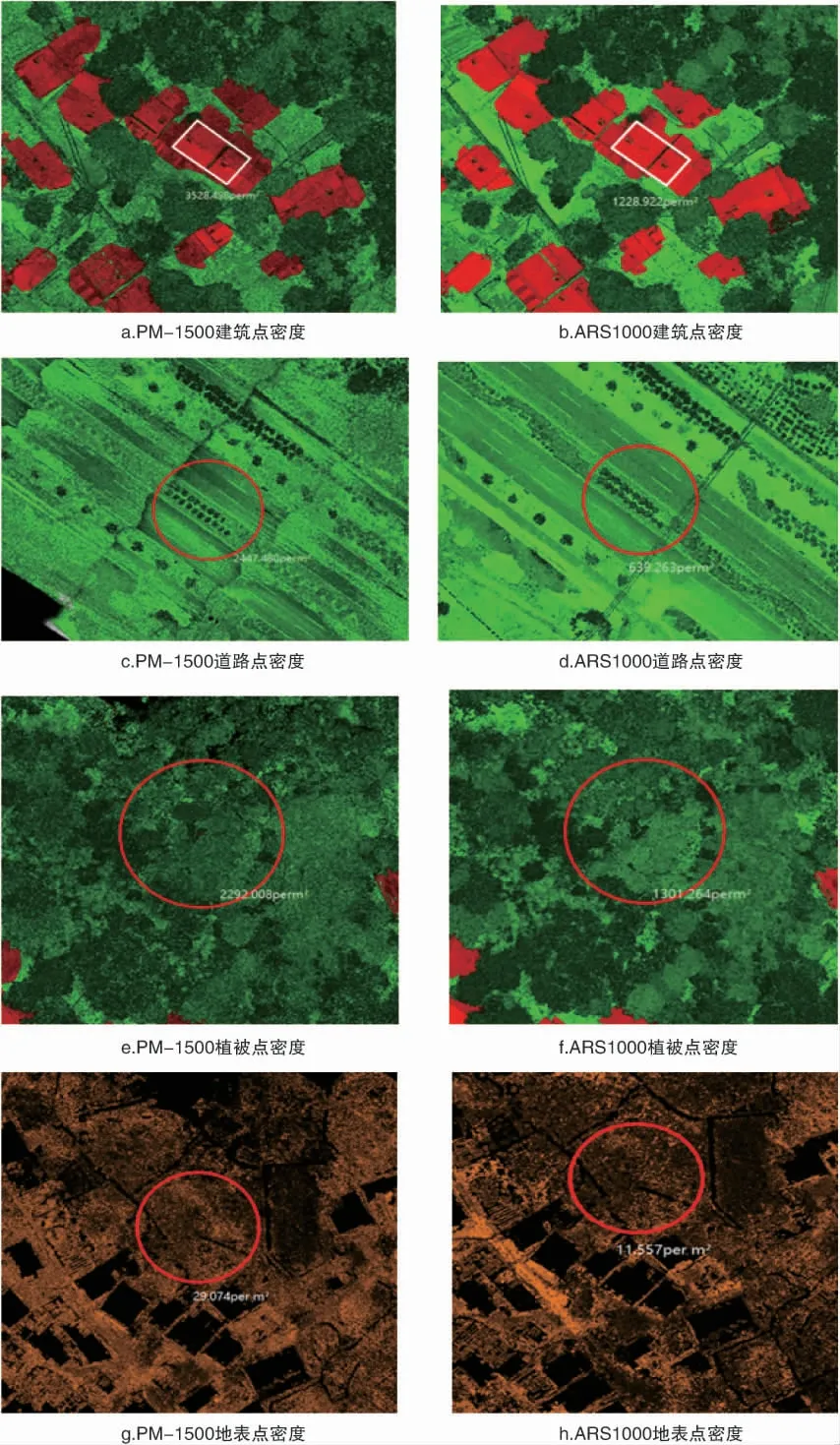
图5 实验区域一点云密度对比图
按照技术流程进行地形测绘成果的生产,部分DLG(如图6所示),PM-1500获取的房屋边缘点数量较多且关键位置如房角等均有点云,相对来说ARS1000点云密度较低、特征位置缺少点云,在绘制房屋时依赖软件的自动拟合功能,降低DLG的成图精度。
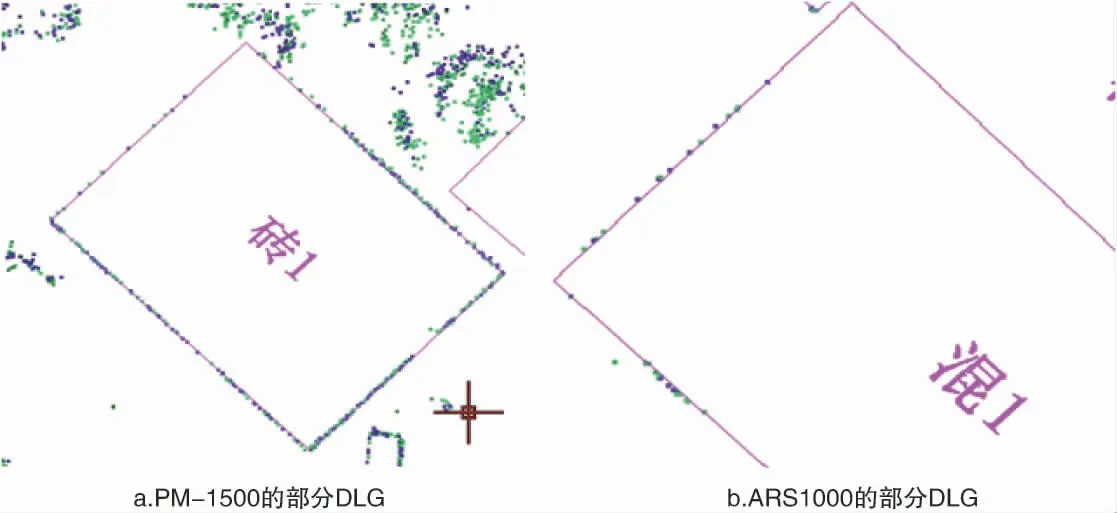
图6 DLG点密度对比
基于地表点云生成测区的DEM图像,对比分析(如图7所示)。基于PM-1500的点云数据生成的DEM地形细节更丰富,地面的微小起伏可以细致地表现出来,相对来说,基于ARS1000的点云数据生成的DEM图像由于点云密度低,生成模型式需内插高程点,使最终的DEM部分区域和真实地表有一定出入。
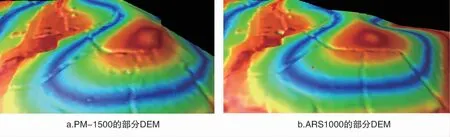
图7 DEM对比
2.4.3 测区二实验分析
机载激光雷达飞行高度及测量距离之间的关系示意图(如图8所示),不考虑激光器发射功率、飞行安全距离等因素,在角度不变的情况下,机载激光雷达测量系统飞行高度和激光的测距能力成正比,即测量距离D越远,可以实现的飞行高度H越大,在相对高差大的测区内作业更有优势。同时,测量距离D越远,航带宽度2L也会越大,单航带测量覆盖区域越大,可以有效提高作业效率。PM-1500的最大测距为1500m,显然在地物反射率等外界因素影响相同的情况下,PM-1500在起伏落差大的测区内效率更高。
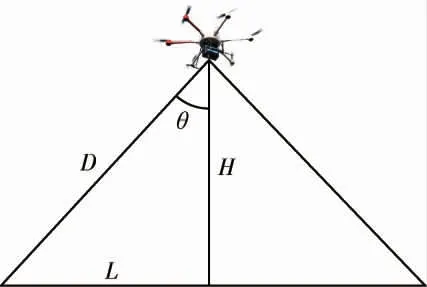
图8 激光雷达飞行高度示意图
飞行高度计算公式如式(6)所示:
式(6)中,H为飞行高度;D为激光测量距离;θ为激光扫描角度的一半。
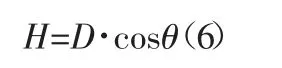
测区二为山地地形,落差超过300m。采用PM-1500设备单架次完成作业,得到点云数据,精度分析后得到高程误差为9.1cm,满足1∶2000测图的精度要求。之后进行地形测绘产品生产,得到DEM和DLG(如图9所示):
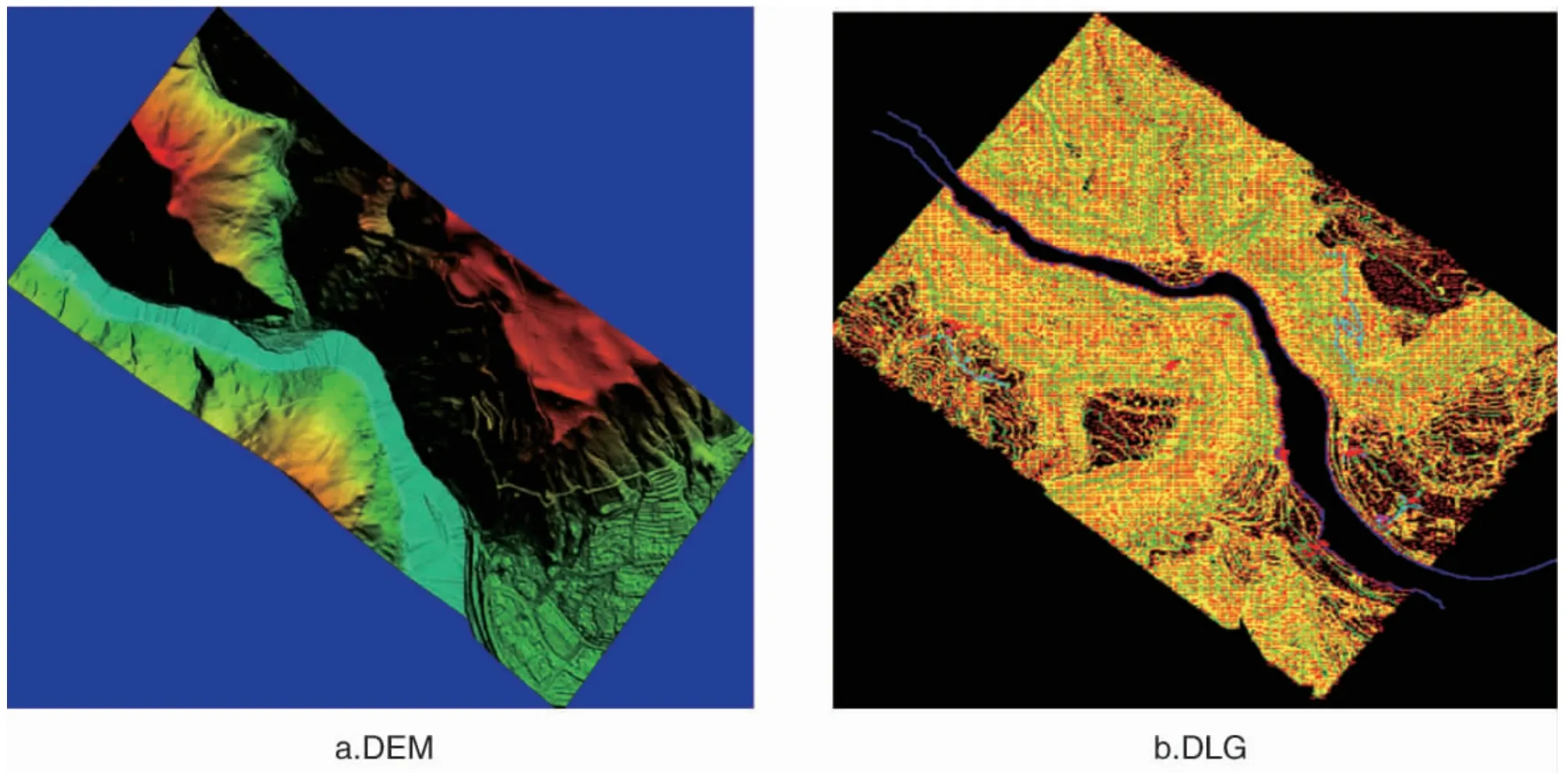
图9 实验区域地形测绘产品成果
3.结束语
本文基于机载激光雷达相关技术,介绍了基于新型机载LiDAR在地形测绘中的应用,主要包括以下内容:
(1)梳理了基于机载激光雷达进行地形测绘应用中的技术流程,包括飞行准备阶段、数据采集阶段、数据处理阶段和成果生产阶段;
(2)通过在平坦区域进行实验,对比分析了传统激光雷达和新型激光雷达在地形测绘应用中的点云密度、各项误差等,验证了新型激光雷达高点频的优势,即高密度点云可以更加精确地选择特征点与表达地表地形,进而获取更高精度的DLG和DEM产品;
(3)通过在山地区域进行实验,验证了新型激光雷达长测距的优势,即可以在地形起伏大的区域完成作业,且精度符合测图需求。
总之,本文总结了地形测绘的技术流程,并通过实验验证了新型机载激光雷达高点频、长测距、高精度等优势特点,可为行业同类应用提供参考。
猜你喜欢
北京测绘(2022年5期)2022-11-22
山东煤炭科技(2022年6期)2022-07-14
汽车观察(2021年8期)2021-09-01
河北地质(2021年4期)2021-03-08
当代陕西(2020年23期)2021-01-07
中国铁道科学(2019年5期)2019-10-19
中国交通信息化(2019年1期)2019-03-26
测绘通报(2018年10期)2018-11-02
电子制作(2018年16期)2018-09-26
安徽地质(2016年4期)2016-02-27
