
毛细石英管构成的高灵敏度位移传感器
2021-09-27 07:01:22叶文豪郭小珊
仪表技术与传感器 2021年9期
王 媛,江 超,陈 宁,王 解,叶文豪,郭小珊
(湖北师范大学物理与电子科学学院,湖北黄石 435002)
0 引言
光纤位移传感器由于响应速度快、灵敏度高,特别适合于一些精度级别要求较高的微位移测量场合。多年来,各种结构类型的光纤位移传感器层出不穷[1-10],这些光纤位移传感器性能优良、响应速度快、测量精度高,但有些结构相对复杂、装配不方便,有些需要设置专门的参考臂等。而利用光纤干涉仪制作位移传感器也被人们关注[11-15],主要采用光纤马赫-则德尔(M-Z)干涉仪与光纤法布里-珀罗(F-P)干涉仪结构,这些干涉仪结构很简单,容易集成,装配方便,大多数时候不需要参考臂。光纤F-P干涉仪作为4种常见的相位调制光纤干涉仪之一,具有精度高、稳定性强等优点[16]。由于F-P腔独特的工作原理,通过改变F-P腔的腔长来改变传输光束的相位,这使得F-P干涉仪具有极高的灵敏度和分辨度。因此利用F-P干涉仪制作位移传感器,具有极高的测量灵敏度,但相应测量的位移范围较小,一般比较适合用于小位移量测量。Polymicro Techologies公司生产的毛细石英管性能稳定,对温度不敏感,不会因温度变化对实验结果造成过大影响,且机械强度较高,价格便宜,利用它制作的F-P腔传感器有一定的应用前景[17-21]。本文采用毛细石英管与平面反射镜构成一个腔长可调的F-P干涉仪型位移传感器,传感器工作原理是多光束干涉,而且干涉谱的条纹宽度大、峰值大。设计的光纤位移传感器结构简单、成本低廉、制作方便、灵敏度高、微位移测量范围较大,能够用于航空航天、海底探测、科学研究等精度级别较高的微位移测量场合。
1 传感器结构与工作原理
1.1 传感器结构设计与制作
图1为制作的光纤F-P干涉仪型位移传感器的结构示意图。单模光纤(SMF)采用国产的普通标准单模光纤,纤芯直径为9 μm,包层直径为125 μm;毛细石英管型号为TSP075150,内径为75 μm,管壁为高纯度石英玻璃,管壁外径为125 μm,与单模光纤的包层直径一致。传感器制作过程如下:
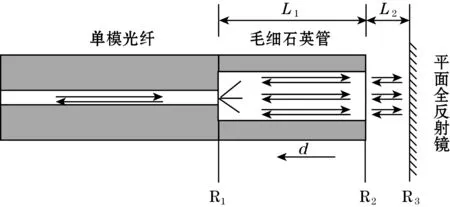
图1 毛细管构成的F-P干涉仪传感器结构示意图与光路图
第一步,单模光纤与毛细石英管熔接。取一段几厘米长的毛细石英管,先用火焰将毛细石英管的表面保护层烧掉,用丙酮溶液把毛细石英管表面擦干净;然后用特种玻璃切割刀把毛细石英管端面切割平整;最后利用光纤熔接机将处理好的单模光纤和毛细石英管正对熔接起来。由于毛细石英管为空心,与单模光纤不一样,为防止熔接过程中可能出现塌陷情况,采取手动调节方法对熔接模式进行调节与控制。
第二步,用飞秒激光精密切割技术将毛细石英管切到合适的长度[22-23]。由于在F-P干涉仪中毛细石英管长度要求很短,为μm量级,一般办法无法把毛细石英管切割到如此短的长度。我们利用实验室搭建的飞秒激光微纳加工平台,用飞秒激光将几厘米长的毛细石英管依据要求切短到μm量级,实验保留毛细石英管长度约为L1=100 μm,并且确保把毛细石英管的端面切割光滑平整。
第三步,利用平面反射镜构成F-P干涉仪。将制作好的毛细石英管结构固定在精密位移平台上,在毛细石英管末端面位置处垂直放置一面平面全反射镜,利用平面镜和毛细石英管一起构成一个复杂的F-P干涉仪。
把制作好的图1所示的干涉仪结构用三端口环形器与宽带光源和光谱仪连接,其中输入端连接宽带光源(BBS)上,输出端接到光谱分析仪(OSA),构成图2的位移传感器示意图。在进行位移传感测量实验时,平面镜固定不动,通过移动精密位移平台使毛细石英管移动,产生位移d,改变F-P干涉仪的腔长,使干涉仪反射谱谐振峰的中心波长发生漂移,找出位移量与谐振峰中心波长漂移的关系,实现位移测量。
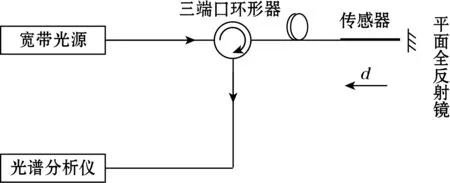
图2 位移传感器的示意图
当毛细管与平面反射镜之间初始距离L2=20 μm时,依据图2测量图,测得F-P干涉仪的初始反射光谱图为图3。由主反射面R1与反射镜面R3构成的F-P腔的腔长L0=L1+L2=120 μm,比较小,所以干涉仪在1.3~1.6 μm之间反射谱的谐振峰不是特别多,而且自由空间光谱间隔FSR也较大,适合做传感器。为了对比分析该结构的传感性能,挑选传感器反射谱中处于中间位置的波谷1和波谷2作为实验观测点,其中波谷1的中心波长λ1=1 459.6 nm,峰值强度A1=-13.43 dB;波谷2的中心波长λ2=1 470 nm,峰值强度A2=-13.08 dB。则FSR=1 470 nm-1 459.6 nm=10.4 nm。

图3 传感器的初始反射谱
图3的光谱图通过傅里叶变换得到图4所示的频谱图,使得在时阈难以观测的光模式通过转到频域就非常容易分辨。从图4的空间频谱分布图可知,在功率成分中占最主要作用的是5个高阶模,还有一些更高阶模在反射谱的形成中也起到了一定的作用,其他模式作用可忽略不计。
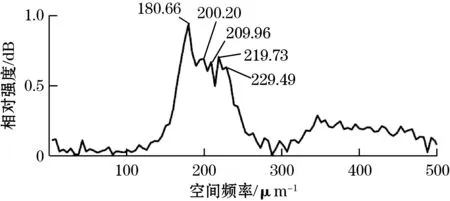
图4 传感器的初始频谱图
1.2 传感原理分析
传感器光路示意图如图1所示,该干涉仪包括3个F-P腔,由反射面R1与R2形成Q1腔;由反射面R2和R3构成Q2腔;由反射面R1和R3构成Q3腔。由于毛细管管径为75 μm,比较大,石英管壁为25 μm,较小,因此光大部分模式在管腔内部传输,石英管壁里传输的光模式较少,而且R2面为环形面,因此实际反射面R1与R2之间的反射光是很微弱的,形成的干涉对总干涉贡献很小。同时石英管壁里传输的光模式较少,R2面为环形面,在反射面R2与反射镜面R3之间形成干涉也是很微弱的,对总干涉贡献也很小。最终形成F-P干涉仪的主要是由反射面R1和R3构成的Q3腔。当光经过干涉仪干涉后传输进光谱仪,可以观察传感器的干涉光谱。输出的反射干涉光谱的光强[24-25]:
(1)
式中:I(λ)为干涉光的总光强;A1和A3分别为反射面R1与R3反射光的振幅;λ为真空中的光波波长;φ为两反射面反射光的相位差,可以表示为
(2)
式中:nair为Q3腔内空气的折射率;L为Q3的长度,L= (L1+L2)+d=L0+d。
当φ=(2m+1)π时,得到干涉仪中谐振峰波谷的波长λm:
(3)
则谐振峰波谷波长的漂移量:
(4)
式中Δd为位移量。
因为空气腔中折射率nair不随位移量的改变而变化,因此可以通过监控波长漂移量测量微小位移。
2 实验结果与分析
图5为传感器进行位移测量的实验装置示意图,传感头固定在精密位移平台上,精密位移平台与全反镜均固定在精密光学平台上,传感器分别与宽带光源(BBS)和光谱分析仪(OSA)相连接。实验开始前调节传感头与全反镜使它们垂直正对,实验过程中全反镜固定不动,利用精密位移平台上的千分尺使传感头端移动进行位移传感测量。在实验时,首先调节精密位移平台上的千分尺将传感器末端与全反镜的镜面保持零距离接触状态,然后调节千分尺使传感器末端端面离开全反镜,最后距离保持L2=20 μm状态,完成F-P干涉仪的初始设置,获得显示度很好的反射谱如图3所示。接着正式开始位移实验,每次转动千分尺上的微分筒一格,使传感器向左移动d=10 μm,光谱仪记录一次波形变化。传感器结构一共向左移动了90 μm,记录了8次光谱变化图,实验发现如果传感器再向左增加位移量(>90 μm)时,发现传感器反射谱的谐振峰强度衰减很快,强度变得很小,无法区分判断,故不宜再进行位移测量。实验发现当传感器向左移动的位移量不断增大(20 μm→90 μm)时,即F-P腔长不断增大,传感器的反射谱整体向右漂移,下面取传感器反射谱谐振峰波谷1与波谷2进行实验结果讨论与分析。
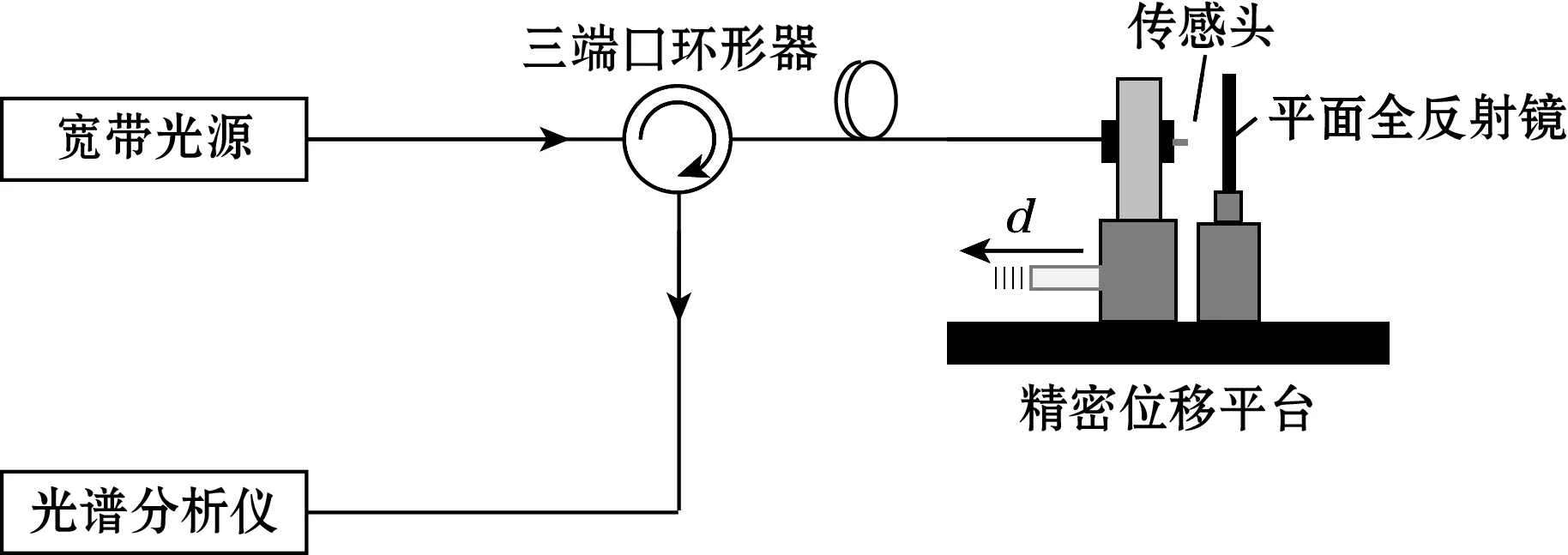
图5 传感器测量位移的实验装置示意图
图6记录了传感器反射谱中波谷 1随位移量d的变化图,随着位移增大,波谷1的中心波长λ1红移,将光谱分析仪上的数据导入到MATLAB软件中进行线性拟合,结果如图7所示,波谷 1的中心波长漂移量与位移之间存在良好的线性变化关系,线性拟合度R2=0.988 7,可得位移灵敏度为254 pm/μm。
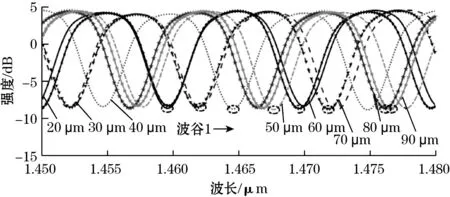
图6 反射谱中波谷 1随位移量d变化图

图7 波谷1中心波长随位移的变化关系与拟合
图8记录了传感器反射谱中波谷 2随位移量d的变化图,随着位移增大,波谷 2的中心波长λ2也红移,将光谱分析仪上的数据导入MATLAB软件中进行线性拟合结果如图9所示,波谷 2 的中心波长漂移量与位移之间存在良好的线性变化关系,线性拟合度R2=0.989 1,可得位移灵敏度亦为254 pm/μm。波谷2的位移灵敏度与波谷 1的位移灵敏度一样。实验结果与前面原理分析相一致,如果取反射谱中其他波谷进行实验研究,亦能够获得相同的结果。
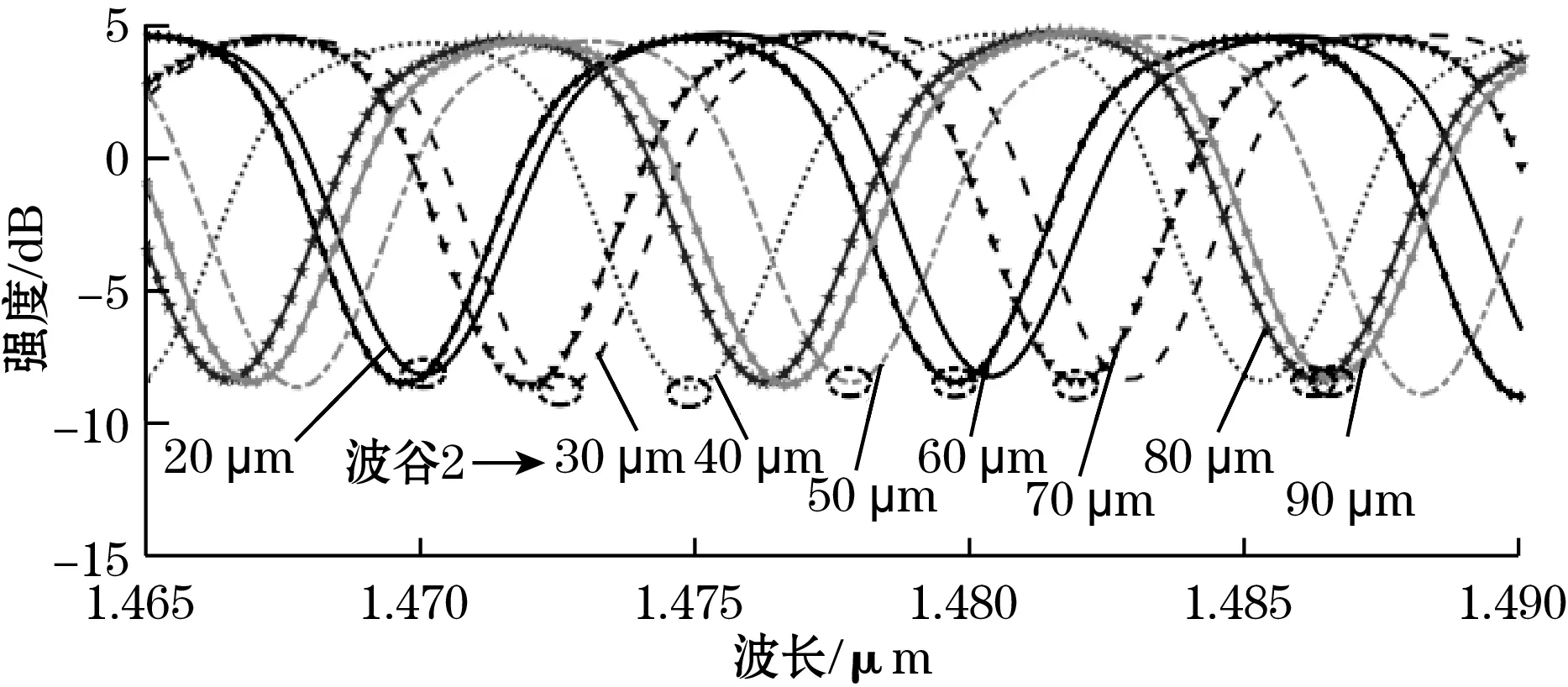
图8 传感器反射谱中波谷2随位移量d变化图
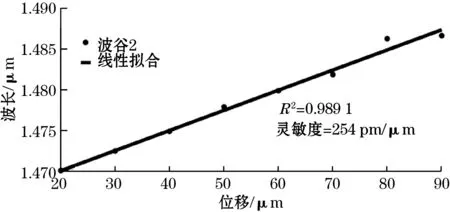
图9 波谷2中心波长随位移的变化关系与拟合
3 结束语
通过简单的单模光纤与毛细石英管拼接,再利用一块平面全反镜,构成F-P干涉仪型位移传感器。传感器的F-P腔主要由熔接端面R1和平面反射镜反射面R3之间形成,通过移动传感器位置改变F-P腔长度,获得传感器变化的反射谱,通过分析传感器反射谱谐振峰波谷的中心波长随位移变化关系,实现了位移量的测量。实验测得传感器反射谱谐振峰中波谷1与波谷2的中心波长随位移变化存在很好的线性关系,线性拟合度都达到99%,在波谷1与波谷2处测得的位移灵敏度均为254 pm/μm。设计的传感器获得了极高的位移灵敏度,它在位移传感方面具有很好的应用前景与发展空间,还可以利用该技术原理检测工件的表面粗糙度与液位等其他的物理量。
猜你喜欢
激光与红外(2022年4期)2022-06-09 07:13:24
石家庄铁道大学学报(自然科学版)(2021年4期)2021-12-07 12:19:38
机电产品开发与创新(2021年5期)2021-10-26 07:19:46
机电产品开发与创新(2021年4期)2021-08-24 01:38:08
航天制造技术(2020年5期)2020-11-10 08:46:38
东坡赤壁诗词(2020年5期)2020-11-06 07:33:43
天文学报(2020年5期)2020-09-28 02:08:34
光谱学与光谱分析(2016年9期)2016-07-12 12:57:02
计算机应用(2016年5期)2016-05-14 10:37:23
无线电通信技术(2015年3期)2015-12-23 11:37:02
