
基于大数据和RGB-D图像的虚拟实验室场景三维重建
2021-09-27 12:35吴永林
宁夏师范学院学报 2021年7期
吴永林
(六安职业技术学院 信息与电子工程学院,安徽 六安 237158)
随着视景仿真技术的发展,利用虚拟视景仿真技术,进行虚拟实验室场景重建,可提高智能虚拟实验室的智慧化建设能力[1-2].因此,相关的虚拟实验室场景三维重建方法受到人们的极大关注[3].
文献[4]提出基于稀疏采样与级联字典的虚拟实验室场景重建方法,结合RGB特征分解方法,进行虚拟实验室场景的重构,但该方法进行虚拟实验室场景三维重建的特征辨识度不高.文献[5]提出基于引导滤波图像分层的虚拟实验室场景三维重建方法,建立虚拟实验室场景RGB-D图像特征提取和细节辨识模型,实现虚拟实验室场景三维重建,但该方法进行虚拟实验室场景重构的特征分辨能力不佳.文献[6]提出基于加速引导滤波的虚拟实验室重建方法,结合特征点匹配方法,实现虚拟实验室重建,但该方法进行虚拟实验室重建的计算内存开销较大.
针对上述问题,本文提出基于大数据和RGB-D图像的虚拟实验室场景三维重建方法,并通过仿真测试分析,展示了本文方法在提高虚拟实验室重建能力方面的优越性.
1 虚拟实验室场景三维图像的内部特征提取与融合
1.1 基于大数据的虚拟实验室场景三维图像内部特征提取
为了实现基于RGB-D图像的虚拟实验室场景的三维重建,需要构建虚拟实验室场景三维图像采集和信息融合模型.采用大数据算法建立虚拟实验室场景RGB-D图像的纹理视觉信息采样模型[7].在运用大数据算法建立采集模型的过程中,需要获得虚拟实验室场景RGB-D图像纹理视觉像素点(i,j)的灰度信息
(1)
(1)式中,R(i,j)、G(i,j)、B(i,j)分别表示RGB色彩分量.
建立虚拟实验室场景RGB-D图像的模板信息特征检测模型,通过模板信息化重建,进行虚拟实验室场景的梯度信息融合和特征分解,构建虚拟实验室场景下的RGB-D图像局部融合模型,得到局部信息融合度特征分量[8].定义虚拟实验室场景RGB-D特征点匹配集为K(i,j),以K(i,j)为中心,建立虚拟实验室场景下的RGB-D空间匹配度函数
(2)
(2)式中,P×Q表示图像S的大小尺寸.
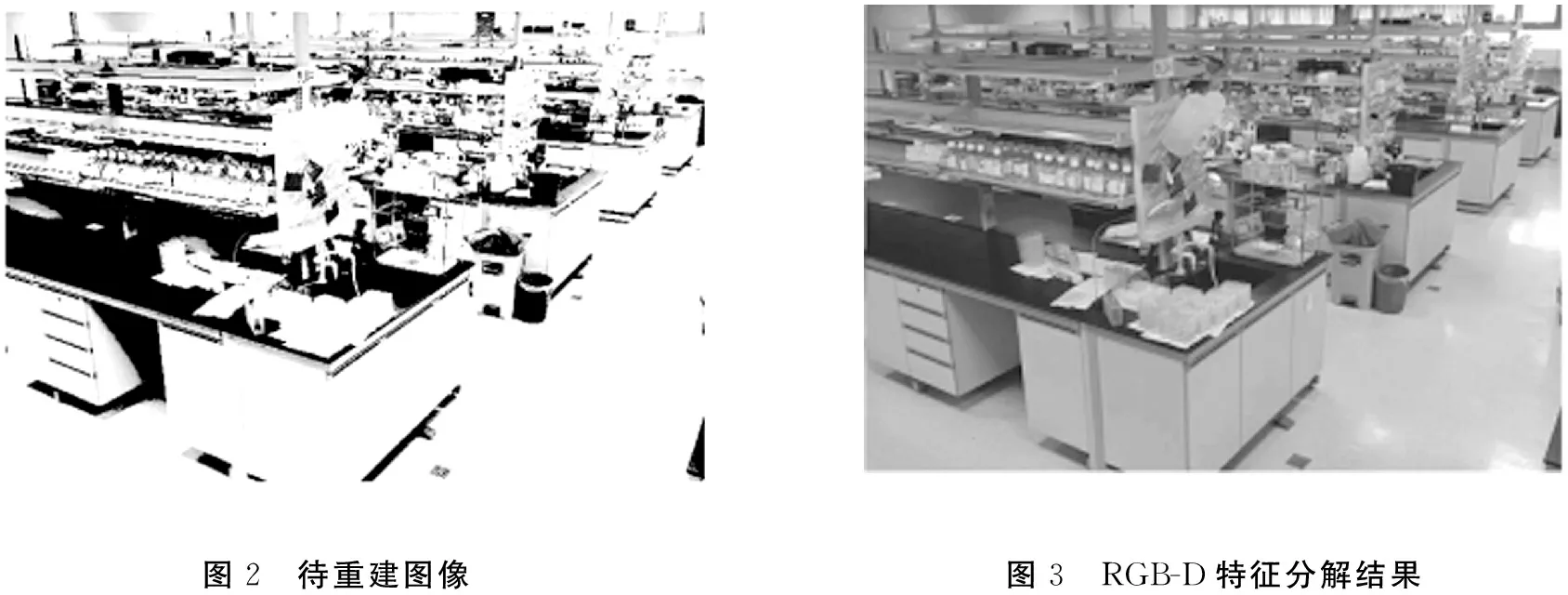
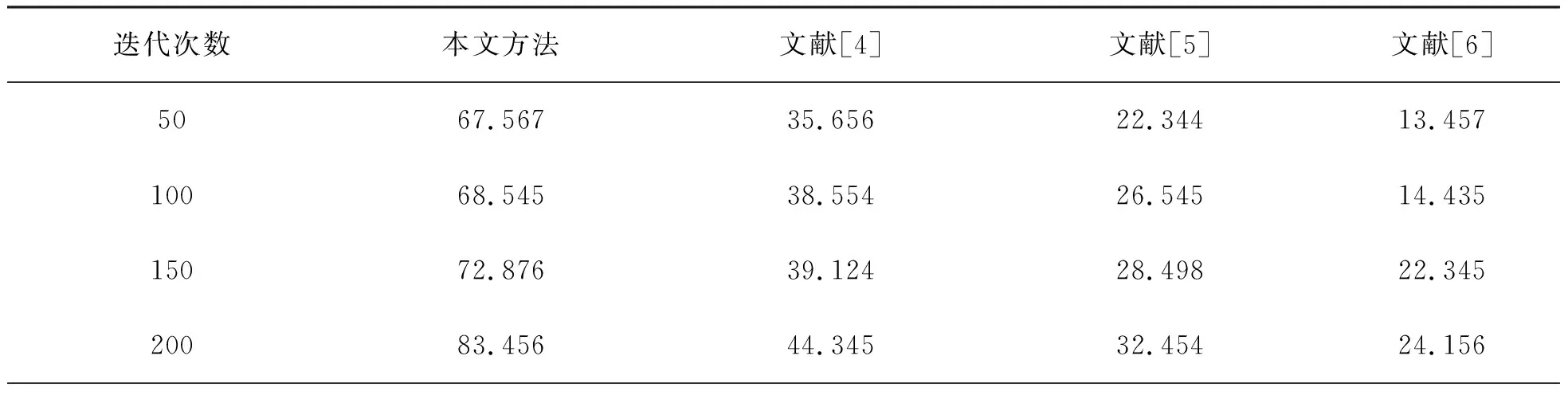
如果P (3) (3)式中,L(i+1,j)、L(i-1,j)分别表示像素点(i,j)前后像素点的梯度.构建虚拟实验室场景RGB -D图像的采集模型,通过虚拟实验室场景RGB分解,获得虚拟实验室场景RGB-D图像的空间视觉分布集为 (4) (4)式中,xi、xj分别表示空间模糊因子.采用大数据方法分析虚拟实验室场景RGB-D图像的内部结构特征量,构造虚拟实验室场景RGB超像素信息融合模型,提高三维场景重构能力[9]. 空间视觉分布集引入形态学算法,构建实验室场景三维图像的内部特征提取模型 (5) (5)式中,ai表示权系数,Dm(x,y)表示内部特征提取函数. 通过上述计算,完成实验室场景三维图像的内部特征提取,接下来进行特征信息融合处理. 采用信息融合和图像重建算法进行虚拟实验室场景的纹理特征点增强处理,建立虚拟实验室场景RGB-D图像的多分辨融合模型[10].采用分块特征匹配技术进行虚拟实验室场景RGB特征分解,结合3D信息融合,建立虚拟场景图像的增强模型.通过边缘轮廓检测的方法[11],得到虚拟实验室场景RGB超像素信息增强模型,以边缘像素集作为中心函数,得到虚拟实验室场景的均衡度 (6) (6)式中,n表示图像中像素的总和,nk表示所在灰度级的像素数,V表示图像中可能存在的灰度级数. 建立虚拟实验室场景RGB-D图像画质低分辨与高分辨之间的过渡模型,通过峰值信噪比检测方法进行灰度信息重组和虚拟实验室场景RGB特征分割,以此得到虚拟实验室场景RGB-D图像特征细节点为K(x0,y0),以K(x0,y0)为中心,得到虚拟实验室场景稀疏度函数为 (7) (7)式中,αi表示投影系数. 通过提取虚拟实验室场景RGB-D图像的模糊度特征,计算任意给定的字典原子 (8) (8)式中,gj表示图像信号长度,δ表示加性噪声. 通过多尺度融合和特征分解,可得到虚拟实验室场景高分辨率残差高频图像 (9) (9)式中,f(L)表示特征梯度函数. 建立虚拟实验室场景高分辨率残差高频图像拟合模型,提取虚拟实验室场景RGB-D细节特征分量,根据虚拟实验室场景RGB-D图像的分块区域特征结果[12],得到虚拟实验室场景特征线性映射函数为 (10) (11) (11)式中,βK表示最小稠密解.通过RGB-D图像分解方法,建立虚拟实验室场景RGB-D图像虚拟现实三维重构模型,采用三维多视点跟踪识别方法进行边缘轮廓检测和信息融合[13]. 本文提出基于大数据和RGB-D图像的虚拟实验室场景三维重建方法,建立虚拟实验室场景三维图像采集模型,进行虚拟实验室场景RGB-D图像的虚拟现实三维重构,对提取的虚拟实验室场景信息采用卷积分析方法进行RGB特征定位,完成虚拟实验室场景RGB特征分解[14],得到虚拟实验室场景的模板匹配函数 (12) 采用外部训练集融合方法,进行虚拟实验室场景RGB-D图像双向三次插值放大,得到虚拟实验室场景RGB-D图像的多模态参量为 (13) (13)式中,l=1,2,…,R,并且k≠l.建立虚拟实验室场景RGB-D图像虚拟现实三维重构模型,将低分辨率图像进行三维重构,得到虚拟实验室场景的相似度为 (14) (14)式中,CL表示实验室场景模糊系数. 采用滤波器进行逐步滤波处理,进行虚拟实验室场景RGB-D图像虚拟现实重构.使用主成分分析的方法,得到虚拟实验室场景的三次插值放大输出为 Ω={x∈s|gj(x)≤0,j=1,2,3,…,l}, (15) 基于重叠块之间特征匹配的方法,进行虚拟实验室场景RGB-D图像的优化分割和信息特征分解. 采用模糊信息融合检测方法,对虚拟实验室场景进行降维处理,得到RGB-D图像重构的残差分布函数为 (16) (17) (17)式中,Eint(vi)与Eext(vi)分别表示模型修正参数与空间向量约束参数. 采用高分辨率残差分解的方法,计算原图像灰度值,得到虚拟实验室场景三维分布矩阵表示为 (18) 对虚拟实验室场景三维分布矩阵对图像重组模型进行修正,可以完成虚拟实验室场景的三维重建. 虚拟实验室三维场景重建流程如图1所示. 图1 虚拟实验室三维场景重建流程 虚拟实验室三维场景重建步骤如下. 步骤1 运用大数据算法建立采集模型时,根据RGB色彩分量计算虚拟实验室场景RGB-D图像纹理视觉像素点的灰度信息; 步骤2 构建虚拟实验室场景下的RGB-D空间匹配度函数,得到实验室场景RGB-D图像的空间视觉分布集,以此为基础构建内部特征提取模型,提取实验室场景三维图像的内部特征; 步骤3 计算虚拟实验室场景的均衡度,并构建虚拟实验室场景稀疏度函数.如果稀疏度不能满足计算要求,则重新计算均衡度,直到满足稀疏度计算要求; 步骤4 通过多尺度融合和特征分解,得到虚拟实验室场景高分辨率残差高频图像,进行实验室场景模板匹配.对虚拟实验室场景高分辨率残差高频图像进行重组,并采用场景三维分布矩阵对重组结果进行修正,得到最终的重建结果. 为了验证本文方法在实现虚拟实验室场景三维重建的性能,进行模拟实验.虚拟实验室场景三维重建的视景仿真平台为Visual C++,采用3DStudio MAX、SoftImage进行视景仿真.实验数据分别来自ImageNet与Corel5k数据库.虚拟实验室场景RGB特征分解的尺度为12,相邻帧匹配系数为0.24,原图像的大小为24×24,锚点个数K=200. 根据上述参数设定,分别从上述数据库中随机选取100张实验室场景图像进行重建.由于篇幅限制,从上述图像中随机选取一张实验室图像进行研究结果展示.待重建图像如2所示. 图2 待重建图像图3 RGB-D特征分解结果 以图2的图像为研究对象,进行虚拟实验室场景重构和RGB -D分解,得到特征分解结果如图3所示. 分析图3得知,本文方法进行虚拟实验室场景重构,特征分解的细节辨识度较高. 利用四种方法测试虚拟实验室场景重构效果的对比,得到对比结果如图4所示. (a)本文方法的重建效果(b)文献[4]方法的重建效果(c)文献[5]方法的重建效果(d)文献[6]方法的重建效果 从图4中可以看出,本文方法进行实验室三维虚拟场景重建效果较好,重建的场景图像清晰且无色差,能够清楚地展现实验室的相关配置.而三种文献中的方法的重建结果存在色差以及严重的模糊问题,重建的实验室场景效果较差.因此可以看出运用本文方法进行实验室三维虚拟场景重建效果较好,能够有效提高图像的三维重建和视景仿真能力. 测试不同方法进行虚拟实验室场景重构的输出信噪比,分别得到对比结果见表1. 表1 虚拟实验室场景重构的峰值信噪比对比 (单位:dB) 分析表1得知,在两种数据集合共计200次的迭代运算过程中,本文方法重构后的峰值信噪比始终高于三种传统方法,说明本文方法进行虚拟实验室场景重构时提高了输出峰值信噪比,虚拟实验室场景的三维重建质量较高. 本文提出基于大数据和RGB-D图像的虚拟实验室场景三维重建方法.采用大数据算法,精准地采集虚拟实验室场景图像,并进行图像的自适应特征重组,得到信息增强技术下虚拟实验室场景RGB-D图像的特征匹配度.采用分块特征匹配技术进行虚拟实验室场景RGB特征分解,结合3D信息融合,建立虚拟场景图像的增强模型.基于重叠块之间特征匹配的方法,进行虚拟实验室场景RGB-D图像的优化分割和信息特征分解.结合虚拟实验室场景RGB-D图像的信息融合结果,进行虚拟实验室场景的三维重建.对实验结果分析得知,本文方法进行虚拟实验室场景的三维重建的输出质量较高,重建效果较好.1.2 边缘轮廓检测和图像特征信息融合
2 虚拟实验室场景三维重建
2.1 RGB-D图像的分解
2.2 虚拟实验室场景RGB-D图像三维重构

3 重建效果验证

4 结语
猜你喜欢
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
北京航空航天大学学报(2021年6期)2021-07-20
中国生殖健康(2020年7期)2020-12-10
软件(2020年3期)2020-04-20
电子竞技(2019年22期)2019-03-07
电子竞技(2019年21期)2019-02-24
电子竞技(2019年20期)2019-02-24
电子竞技(2019年19期)2019-01-16
商周刊(2017年6期)2017-08-22
