三相PWM 整流器启动冲击电流的抑制方法
2021-09-24 02:46:50郭成涛白云飞姚川恒
电力系统及其自动化学报 2021年8期
郭成涛,白云飞,王 钊,姚川恒
(1.国网石家庄供电公司,石家庄 050000;2.河北拓普电气有限公司,石家庄 050000;3.北京机械设备研究所,北京 100089)
整流器主要发展方向是与自动控制等理论相结合,实现“绿色”电能变换[1],减小对电网的谐波污染。PWM整流器是一种高效、可靠、绿色的电能变换器,其网侧电流可达单位功率因数运行且谐波畸变率低。另外,能量可双向流动,直流电压可控可调,具有极大的实际应用价值[2-3]。随着应用场合的多样化,对其工作性能、控制系统设计难度等方面的要求也越来越多。
当三相整流器启动时,直流侧母线电压给定值与反馈值的偏差较大,电压外环控制器输出达到饱和,也就是电流内环的给定有功电流分量很大,导致网侧输入电流迅速增加,使得整流器由不控整流切换到可控整流时会产生网侧启动冲击电流。该电流严重地影响系统安全,冲击电流可能击穿,烧毁网侧电感和功率器件。但如果增加电感和功率器件的额定电流,又会带来成本增加等问题。
为了解决整流器启动冲击电流的问题,国内外有很多此类研究工作。文献[4]将负反馈加到电流环控制中,从而可以降低电流波动,达到抑制冲击的目的,但是此方法降低了整流器的负载变动时的响应速度;文献[5]通过交流电流的幅值和比例、积分系数的影响,来调整电流内环的PI 参数,其缺点是所需要的参数只能通过经验确定,应用存在一定难度;文献[6]针对使用正弦脉宽调制SPWM(sinu⁃soidal pulse width modulation)方法的整流器,通过启动时刻加入电阻和调整调制波来抑制电流的冲击,对于采用SVPWM方法的整流器来讲,就是采用限流电阻抑制冲击电流,该方法实现简单,但是对于电阻的要求比较高,增加了成本,同时也需要利用额外的开关或者继电器将电阻短路掉,从而增加了整流器的成本,经济性差;文献[7]中分析得知,系统的相电流由基频正弦电流和按照确定时间常数指数衰减的直流量两部分组成,因此提出在启动时刻通过一个特定直流量的注入调整调制波,此注入的直流量需要按指数衰减,增加了控制器的运行负担;文献[8]将直流电压给定从不控整流所得的电压开始增加,不同阶段分别用直线和抛物线来给定,实现了很好的效果,只是要确定不同曲线的切换点以及抛物线规律给定的形成计算,使得计算量较大,控制的设计有一定难度;文献[9]为了避免整流器在启动时刻的直流电压偏差太大,先不加入电压PI 调节,使电流环的指令值逐渐上升,到一定值时在加入电压PI调节,该方法需要对电压外环和电流内环同时进行改进设计;文献[10]通过控制上下桥臂功率器件的导通关断来使冲击电流减小;文献[11]采用了判断电流矢量区间,更改开关状态来限制启动冲击电流,但是该方法存在一定的延迟,影响了电流的抑制结果;文献[12]在电流出现冲击后,控制特定功率器件的导通关断,实现对冲击电流的抑制。此3 种方法都需要在不控整流到稳定的PWM整流过渡阶段采用额外的电流检测和驱动信号确定的设计,增加了控制系统的复杂程度。
1 三相PWM 整流器数学模型
三相电压型PWM整流器主电路一般采用三相半桥式结构,其拓扑结构如图1所示。
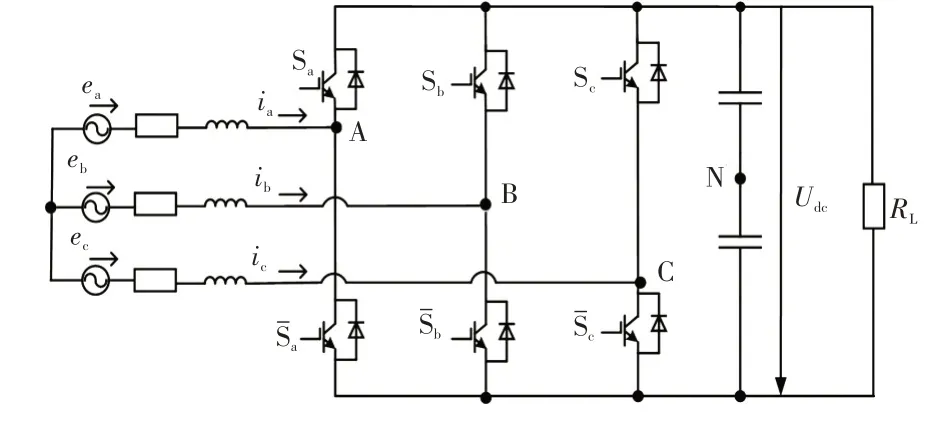
图1 三相PWM 整流器拓扑Fig.1 Topology of three-phase PWM rectifier
图中:ea、eb、ec为交流侧三相电网电压;ia、ib、ic为交流侧三相电流;Udc为整流器直流侧母线电压。
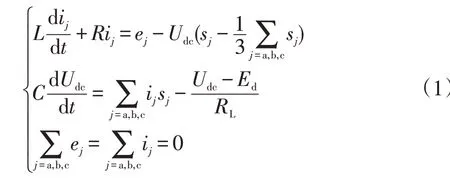
基于基尔霍夫电压定律得到整流器在三相静止坐标系下的数学模型,即

2 三相PWM 整流器冲击电流抑制方法

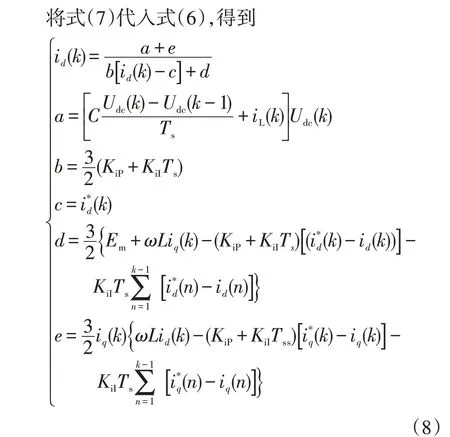
由于系统控制在单位功率因数状态,q轴的电流和电流指令值均为0,所以忽略式(8)中的e项以及d项中的ωLiq(k),将式(8)化简为

式(10)即为电流id的离散形式。忽略电流环的响应时间(电流环响应时间快于电压环响应时间),也就是d轴电流实际值和给定值相等,那么,式(10)可以化简为

由式(12)可知,id(k)与Udc(k)及直流电压变化率、iL(k)同向变化[8]。在基本的整流器控制方式中,直流电压指令值可等效为阶跃给定,这就导致了在启动PWM 整流器瞬间,直流母线的电压变化率加大,id(k)也迅速升高,最终导致网侧电流产生冲击。直流电压指令为阶跃信号是导致PWM整流器网侧产生冲击电流的最重要原因。因此,对直流电压指令值做出调整,以减小直流母线电压及其变化率等,从而实现整流器启动PWM 整流的瞬间电流冲击得到抑制。
首先,令直流母线电压在PWM 整流启动瞬间的初值为Udc1,也就是不控整流状态的直流母线电压,Udc1=2.34E,E是网侧相电压的有效值。本文提出的启动方式是,在启动PWM整流的瞬间,将直流侧母线电压指令值设定在略小于Udc1,然后缓慢增加到系统要求的直流电压,如图2所示。启动时间的计算公式为
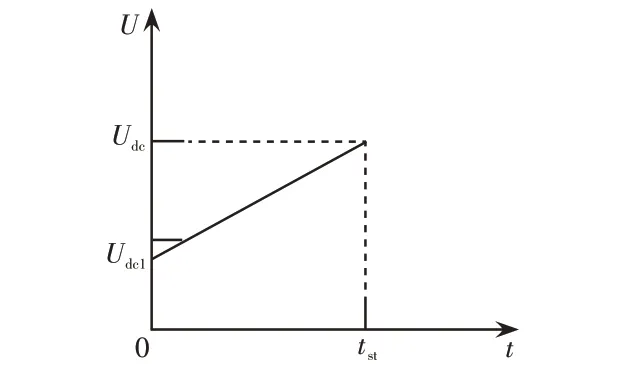
图2 直流母线电压给定Fig.2 Reference voltage in DC bus

式中:UL为每次的步长,也就是每次执行中断程序所增加的直流电压数值;fi为中断频率。启动时间tst尽量选取满足要求的数值,在启动瞬间之后的过渡过程中,直流母线电压给定值的曲线的斜率越小,使得该过程的直流母线电压值及其变化率越小,进而id(k)的冲击得到有效限制,从而抑制PWM整流器启动瞬间网侧电流冲击的产生。
3 实验结果与分析
为了验证上述控制策略的有效性,在三相PWM整流器实验平台上进行实验。表1 给出了具体的实验参数。

表1 实验平台参数Tab.1 Parameters of experimental platform
以图2 的曲线作为PWM 整流运行的动态直流母线电压指令值,其启动时间tst分别在0.187 5 s 和0.375 0 s 时得到的实验波形如图3和图4所示。
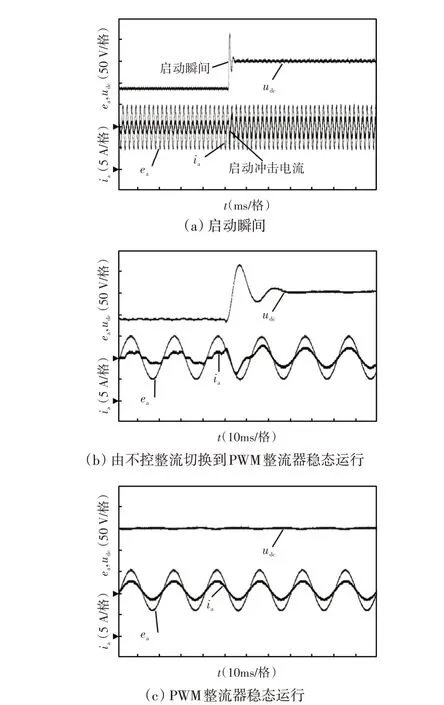
图3 启动时间tst=0.187 5 s 的实验波形(短时间启动)Fig.3 Experimental waveforms under the condition of tst=0.187 5 s(short start-up time)


图4 启动时间tst=0.375 0 s 的实验波形(较长时间启动)Fig.4 Experimental waveforms under the condition of tst=0.375 0 s(long start-up time)
由图3可见,启动时间如果过短,也就是图2所示直流侧母线电压的斜坡给定的斜率过大,虽然最终可以实现可控整流稳定运行,但是不能完全有效地抑制网侧冲击电流,而且直流侧母线电压在启动瞬间也会出现短暂冲击。冲击电流的存在,也就是d轴有功电流存在过冲,因为输入功率瞬间提高,那么直流侧输出功率也会随之增加,这部分能量反映在直流侧,也就是会出现该时刻直流母线电压的冲击。当系统进入PWM 整流状态时,由网侧电压电流及直流母线电压的实验波形,说明整流器在可控整流状态实现了高性能运行。
由图4可见,将启动时间变长,也就是图2所示直流侧母线电压斜坡给定的斜率变小,可以明显地抑制启动瞬间的冲击电流,而且直流侧电压也是逐步上升的。相较于图3所示的情况,将tst增加1倍,即为0.375 0 s,交流电流的冲击没有出现,这说明,将tst延长,可以使启动冲击电流得到有效抑制。最后,PWM 整流器的网侧电压电流及直流母线电压的稳态波形,说明实现了直流侧电压稳定以及网侧单位功率因数运行控制。
4 结 语
本文在传统PWM整流器控制策略及抑制启动冲击电流方法的基础上,提出一种应用于整流器启动瞬间通过改动直流电压给定来抑制网侧冲击电流的方法。该方法使直流侧电压平缓上升,有效地抑制了启动瞬间的冲击电流。另外,该方法具有原理简单和易于实现的特点。样机的实验结果也验证了本文提出的启动方法,不仅使得PWM 整流启动瞬间的网侧电流冲击得到抑制,而且直流母线电压也能平缓地达到预期指令值。因此,本文所提出的方法可应用于三相PWM整流器的启动过程。
猜你喜欢
科学家(2021年24期)2021-04-25 17:55:12
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
通信电源技术(2016年4期)2016-04-04 02:57:16
电源技术(2015年1期)2015-08-22 11:16:26
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年12期)2015-04-09 11:44:44
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年14期)2014-04-04 11:53:30
电机与控制应用(2013年9期)2013-11-21 08:00:04