DIS实验验证机械能守恒定律
——采用通用软件进行创新与改进
2021-09-24 03:22陈蕾卉刘爱云
物理通报 2021年10期
陈蕾卉 刘爱云 涂 泓
(上海师范大学数理学院 上海 200234)
1 引言
机械能守恒定律是运动学中的基本定律,同时也是中学物理课程学习的重点内容.它反映了在只有重力或弹力做功的物体系统内,物体系统的动能和势能之间可以发生相互转化,但机械能的总能量保持不变这一理论.在传统的验证机械能守恒定律的DIS实验中,通常采用专用软件进行测量,初速度为零是给定的默认实验条件,并不是实际测量出来的.在实际实验中,有可能由于初始释放的位置、人手释放的不确定性等因素,导致其实验结果与初速度为零的实验计算结果相差较大.并且,这种初速度及实验表格都提前为学生预备好的做法,并不能锻炼学生的物理科学思维、创造力及思辨能力.本文采用通用软件的测量方式来进行实验,让学生自行设计实验表格,并改进了关于初速度的测量方式.因此,本文中的以通用软件来进行实验相较于传统的使用专用软件来说,更加准确和全面[1,2].
2 实验装置简介
实验器材:朗威DISLab数据采集器、计算机、朗威光电门传感器、摆锤、细线、铁架台、带刻度的高度板.
实验装置如图1所示.其中光电门传感器固定在带刻度的高度板上,接入数据采集器中,当摆锤经过光电门传感器时,光电门传感器会实时记录摆锤经过光电门传感器的时间,计算出此时摆锤的速度[3].

图1 实验装置
3 实验原理
把一个摆锤由细线悬挂起来,并拉到一定高度.当摆锤由静止开始释放时,如果忽略空气阻力,此时摆锤只受到绳子给的拉力和本身所受的重力.根据摆锤的运动状态及受力分析,绳子给摆锤的拉力不做功,此时系统中只有重力做功,动能和势能之间可以相互转化,符合机械能守恒定律的条件[4].
根据机械能的定义可知,无论势能和动能如何变化,两者之和都等于机械能.则将摆锤经过A,B,C,D4点的动能值和势能值分别对应相加,如果得到的4个机械能值,在误差允许的范围以内基本一致,则可以证明机械能守恒定律成立.
4 实验过程及实验结果
(1)进入朗威通用软件,设计表格如表1所示.
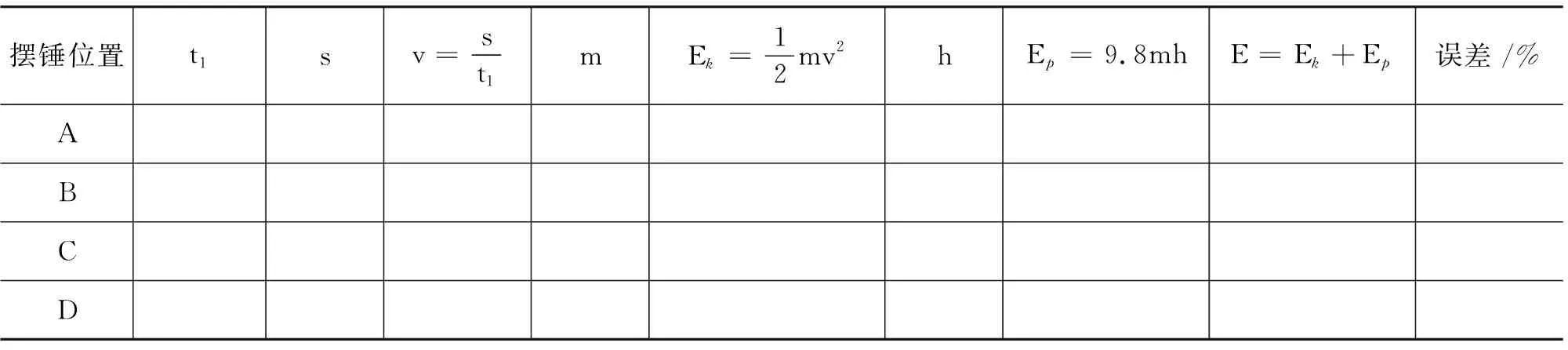
表1 验证机械能守恒定律设计表格
(2)测量摆锤直径s及其质量m,以及高度板上P,Q,R点的高度(假定D点高度为零,D点所在水平面为零势能面),填写到表格中.
(3)利用测平器精准完成实验装置定位,将摆锤释放装置固定到实验器上的P点,光电门的挡光孔固定在实验器的A点上.
(4)点击“开始”,在P点释放摆锤,摆锤通过光电门传感器的时间将被记录在表格中,通过公式计算出摆锤通过A点的速度.
(5)调整光电门位置分别到B,C,D3点,重复上述实验步骤,测得摆锤在3点通过光电门传感器的时间,通过公式计算出摆锤通过B,C,D3点的速度.
(6)根据公式计算出A,B,C,D4点上的动能和重力势能,进而求出A,B,C,D这4点上各自的机械能值,得到结果如表2所示.
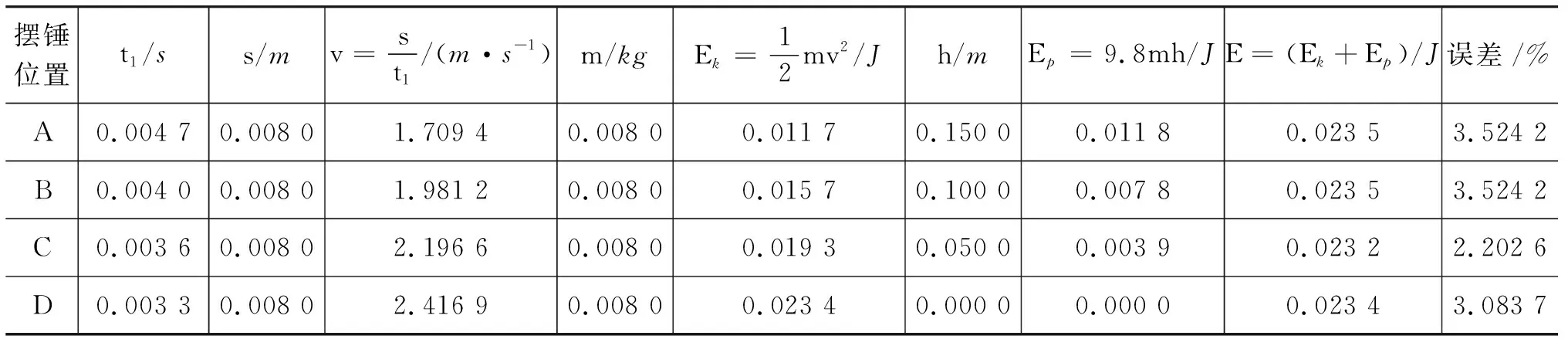
表2 以P点为初始释放点,验证机械能守恒定律的测量数据
(7)再利用测平器,将摆锤释放装置分别固定在Q和R点,重复上述实验,得到结果如表3、4所示.
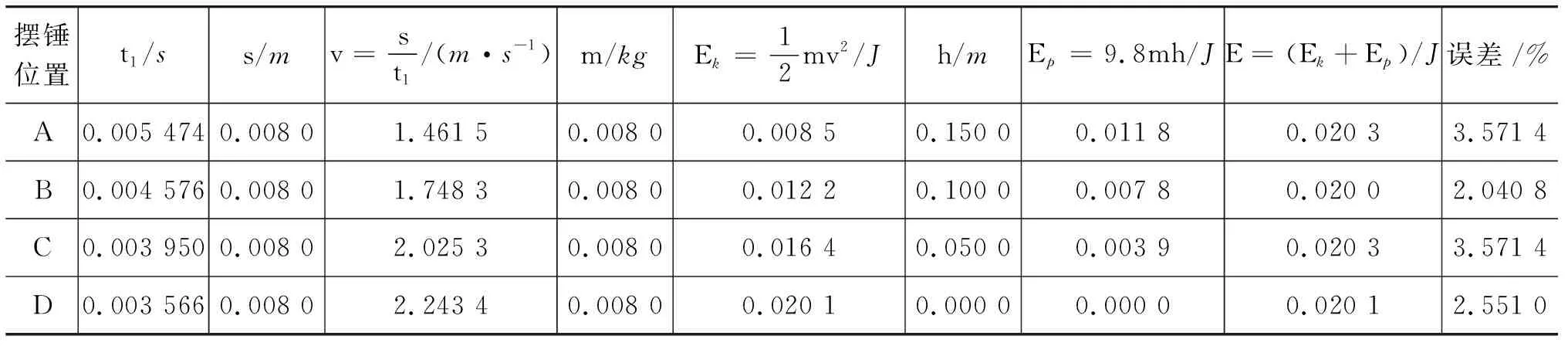
表3 以Q点为初始释放点,验证机械能守恒定律的测量数据
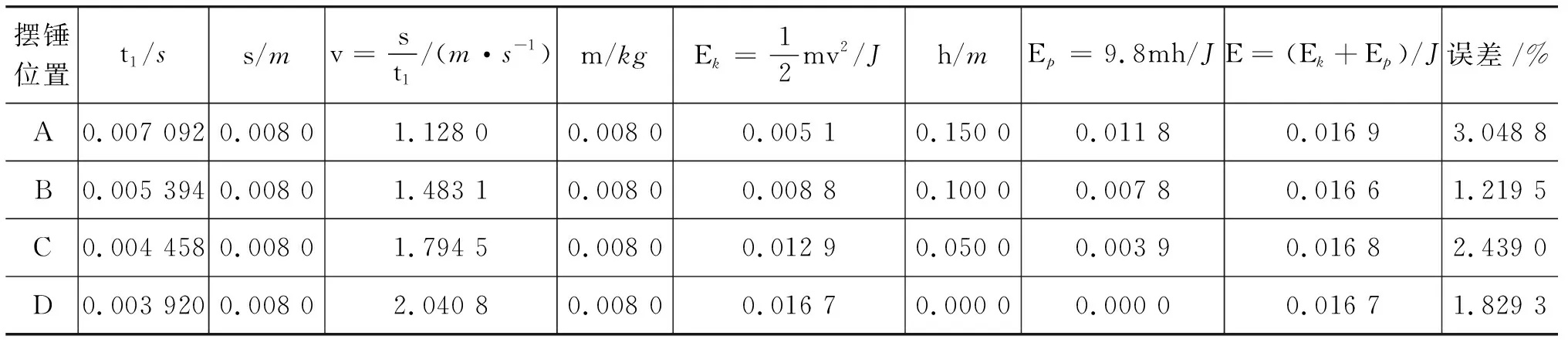
表4 以R点为初始释放点,验证机械能守恒定律的测量数据
(8)将3组数据汇总,绘制成表格如表5所示.
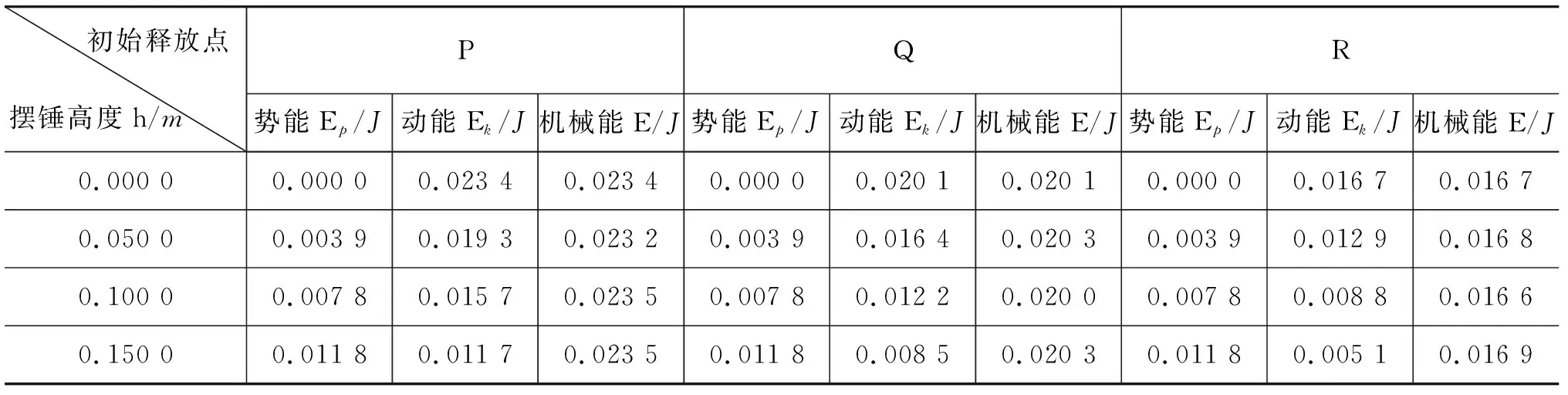
表5 汇总P,Q,R 3点的测量数据
(9)将表5的数据进行对比,绘制成折线统计图,如图2所示.
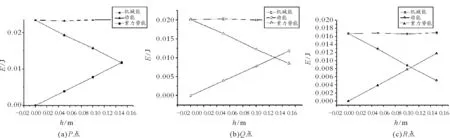
图2 P,Q,R 3点的能值变化
5 专用软件的实验步骤
(1)测量实验摆锤的直径s及其质量m,记录数据.
(2)利用摆锤释放装置在A点静止释放摆锤,分别将光电门传感器固定在测量点D,C,B,测量D,B,C3点上摆锤通过光电门传感器的速度.
(3)通过“数据计算”功能,得到摆锤在A,B,C,D点的动能、势能和机械能值,如图3所示.
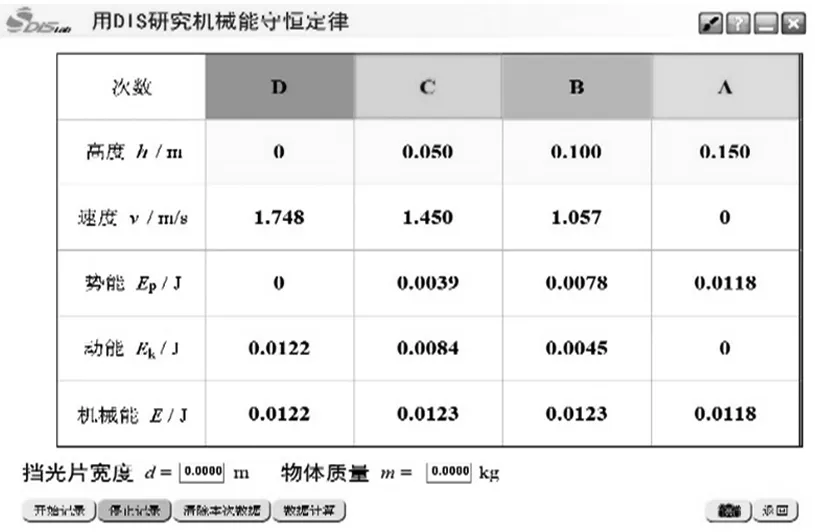
图3 专用软件验证机械能守恒定律的测量数据
6 专用软件与通用软件的对比 改进原因及优势
6.1 两种实验结果分析
由上述实验表格可知,利用通用软件进行实验测量,其实验数据汇总图像较为平稳,各实验数据结果均在朗威实验仪器的误差允许范围以内,结果较为准确.
从数据可以看出,利用专用软件进行测量,采用初速度为零的实验条件,则其他实验结果很容易与给定初速度的实验计算结果出现偏差,造成误差过大的情况.
6.2 专用软件与通用软件的实验步骤对比
专用软件采用的实验方式是将A点作为起始点,并将A点速度为零作为默认的已知条件,直接填写在表格中.之后分别将光电门传感器放在B,C,D3点,测量出摆锤在B,C,D3点的瞬时速度,以此计算出摆锤在A,B,C,D4点的动能、势能、机械能之间的关系,从而验证机械能守恒定律.
本文中所采用的使用通用软件设计实验表格的测量方法,与原始实验方式的不同点在于:将初始点分别改变为垂直高度高于A点的P,Q,R3点,且分别在此3点处释放,使得摆锤在A点的瞬时速度是可被测量的.之后,再分别测量出摆锤在A,B,C,D4点的速度,以此计算4点动能、势能、机械能之间的关系.
6.3 改进原因及优势
综上所述,两种实验方式主要的不同点在于:测量软件的选择、初始位置点的选择以及实验表格的使用上.
在通用软件中,如果仍然照搬专用软件的实验步骤,将光电门传感器固定在A点,将摆锤由A点静止释放,则需要光电门传感器测量出摆锤在A点速度为零的实验结果,此点的数据才有意义.但是由于光电门传感器的工作原理,速度为零的物体实际上并不能引起光电门传感器进行工作.如果想引起光电门传感器工作,则必须存在摆锤经过光电门的时间,通过计算摆锤的宽度与摆锤经过光电门的时间,得出摆锤经过此点的速度值,而此速度值并不符合实验假定的初速度为零这一条件,也同样不能作为A点速度的计算用值.所以,摆锤在A点速度为零这一数值是不能被测量出来的.
根据通用软件的工作原理,使得测量时并不能直接设定初始速度值为零.而舍弃测量摆锤在A点的瞬时速度会使得实验数据较少,并不符合物理实验的严谨性.因此,在选择通用软件进行试验时,我们要进行实验改进,重新选择实验初始点的位置,挑选高于A点的位置作为释放点,并且挑选P,Q,R3点进行多次实验,保证了实验的准确性和严谨性.
同时,指导学生采用通用软件进行测量,并要求学生自行设计实验表格的做法,符合物理的学科特点.标准的实验过程应该是:在实验前,指导学生选择合适的实验器材,设计实验方案;在实验过程中,学生对实验现象进行观察和记录,对数据进行测量和读数;实验结束后,学生自主对数据进行处理和分析,并进行反思与评估.
实验过程是一种培养学生综合能力的过程,是对学生进行创新意识和能力培养的有效途径.实验并不是一帆风顺,有可能出现各种问题和情况,它要求教师不仅要讲授学科基础知识,还要培养学生严谨的科学态度和完备的科学思维.因此,单纯采用实验过程简单,实验操作单一,实验表格直接给定的专用软件来进行物理教学,并不能达到物理实验的学科要求.
本文采用的实验方式可以省略需测量A点速度为零的实验步骤,使得在实验中每一个观察点的测量值都是可以被真实地测量到的,保证了实验结果的严谨性和准确性[5].
7 结束语
通过以上实验结果可知,运用的通用软件实验方法可以成功验证机械能守恒定律,其实验过程力求减少实验误差,实验结果真实可靠,均在物理实验所要求的实验误差范围以内.将传统的专用软件实验方法和通用软件实验方法进行比较分析,可以说明本文运用实验方法的严谨性和全面性,使实验结果更具有说服力[6].对于相同的实验目的,实验方法往往有几种,而从中选出最优实验方法,是实验教学的重要内容.
猜你喜欢
发明与创新(2022年24期)2022-06-14
发明与创新·小学生(2022年8期)2022-06-13
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
中学生数理化·八年级物理人教版(2022年6期)2022-06-05
动漫界·幼教365(中班)(2021年6期)2021-07-21
制造技术与机床(2018年10期)2018-10-13
物理之友(2018年6期)2018-07-13
现代塑料加工应用(2016年4期)2016-09-20
新高考·高一物理(2015年5期)2015-08-18