基于STM32体感交互式仿上肢采摘机械臂设计*
2021-09-23 14:06:48刘忠超范灵燕翟天嵩赵志远
中国农机化学报 2021年9期
刘忠超,范灵燕,翟天嵩,赵志远
(南阳理工学院智能制造学院,河南南阳,473004)
0 引言
随着信息化、自动化技术的不断发展,机械臂作为一种高效可靠的自动化装置[1],成为机器人和人体工程学领域的研究热点和方向,并得到了快速的发展。采摘机器人作为农业机器人的重要类型,它采用机械手方式替代传统的人工作业方式,大大的减轻了劳动强度,节省成本,提高了生产效率。
传统农业采摘机器人的机械臂大都采用现有的工业机械手,体积大、成本高,并且灵活性较差。近年来人体姿态感知技术在电子游戏、医疗康复、智能家居[2]等领域得到了广泛的应用[3]。Baeten等[4]设计的苹果采摘机器人通过采用仿上肢机器人的6自由度机械臂,实现了果实的灵活采摘,日本Kondo等[5]采用一个7自由度的仿上肢关节型机械臂和四轮的移动平台,设计了西红柿采摘机器人,利用仿上肢机械臂各关节的相互协作实现果实的采摘。特别在一些比较恶劣、高危、高精度的工作环境,传统机器臂的灵活性及逻辑判断能力远不及人类的灵活和自由[6],同样对于农业生产中的一些危险作业,比如农民爬到高大的果树上进行水果的采摘,不仅效率低下、费时费力,还存在攀爬跌落的危险[7]。
针对传统机械臂的缺点,本文基于仿生学原理,提出并设计了一种多功能体感交互式仿上肢采摘机械臂系统。系统基于加速度传感器采集人体手臂姿态,开发了机械臂的硬件控制系统及软件系统,搭建了6轴仿生机械臂结构,并通过试验验证了仿上肢采摘机械臂设计的正确性和可行性。
1 系统总体设计
根据体感交互式机械臂的功能需求,机械臂控制系统主要包括手臂姿态采集端和机械臂控制端。系统采用3组MPU6050协同获取人体手臂姿态信息,采集端控制系统采用STM32F407芯片作为处理器,用以实现对人体手臂姿态的数据采集、处理和发送。机械臂控制端利用无线模块SI4432以及STM32F407处理器来接收、分析采集端发送的手臂姿态数据,输出控制信号使机械臂能按照人体手臂姿态的运动轨迹,来完成动作的跟随模仿[8]。体感交互式仿上肢采摘机械臂系统结构如图1所示。

图1 仿上肢采摘机械臂系统结构图
2 仿生机械臂设计
2.1 仿生机械臂运动模型设计
由于体感交互式仿上肢机械臂采集对象为人体上肢,而人体上肢手臂自由运动需要由腕关节、肘关节和肩关节三部分组合运动完成。人体手臂一共包含有6个自由度运动,分别为腕关节屈/伸运动、腕关节外展/内敛动作、肘关节屈/伸运动、肘关节的外旋/内旋运动、肩关节的屈/伸运动以及与肩关节的外展/内敛动作[9]。体感交互式仿上肢机械臂的6个舵机运动的角度和手臂关节运动方向范围如表1所示。

表1 手臂关节活动表Tab. 1 Movement table of arm joint
根据人体手臂运动状态的运动范围和自由度,仿上肢采摘机械臂可以分为肩关节机构、肘关节机构、腕关节机构三个部分,每个机构包含两个舵机,仿上肢采摘机械臂的模型结构以及舵机分布如图2所示。
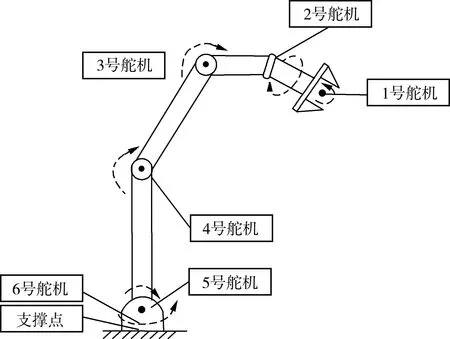
图2 仿上肢采摘机械臂模型结构图
2.2 仿生机械臂运动分析
体感交互式仿上肢机械臂的D-H空间坐标系如图3所示。

图3 仿上肢采摘机械臂D-H空间坐标系
仿生机械臂主要由机械臂、舵机、机械爪等几个主要部分组成,其可以看作数个转动或移动的关节串联而成的。体感交互式仿上肢机械臂在机构学上,可以将其看成为连杆与关节组成,以连杆建立坐标系,设计的机械臂拥有6个自由度的变换,根据Denavit-Hartenberg (D-H)表示法建立的数学模型,并借助于数学模型中的连杆与关节表示,可以建立出机械臂各个舵机的运动坐标系,腕关节包含1号和2号舵机,1号舵机的轴线和2号舵机的轴线垂直相交于1号坐标系;肘关节包含3号和4号舵机,3号舵机和4号舵机轴线垂直相交于2号坐标系;腕关节包含5号和6号舵机,5号舵机和6号舵机轴线垂直相交于3号坐标系[10]。建立连杆坐标后,根据相邻关节坐标间的关系可以确定关节和连杆的D-H参数,从而在三维空间为仿生机械臂的每一个连杆建立一个坐标系或相对于机械臂底座的相对坐标系,进而确定每一个杆件的位置和方向。
3 仿生机械臂控制系统设计
系统控制芯片均选用STM32F407ZGT6单片机,采集端使用3组MPU6050来采集和解析人体手臂动作指令,MPU6050使用I2C通讯方式与STM32F407ZGT6控制芯片进行通讯,将手臂姿态数据传输至采集端控制芯片,采集端控制器将将MPU6050数据转换成角度值,并将数据进行封装,通过SI4432无线通讯模块将上肢手臂姿态数据发送出去。
机械臂运动控制端通过SI4432通讯模块,将采集端的手臂姿态角度值数据包接收后进行处理,转换为6组PWM脉冲信号值,通过接收协调端的控制芯片将6组PWM脉冲信号值传输至舵机控制电路,分别控制机械臂上6个舵机转动,从而控制机械臂完成人体上肢手臂的动作模仿。
3.1 控制器单元
上肢姿态采集端和机械臂控制端均选用STM32F407ZGT6单片机为控制核心。STM32F407ZGT6芯片是内核为Cortex-M4的意法半导体(ST)产品,I/O 接口多达112个,相对STM32F1/F2等Cortex-M3产品,STM32F4最大的优势就是新增了硬件FPU单元以及DSP指令,芯片内部集成了多种功能,如I2C、ADC、SPI、PWM等[11],其主要特点为功耗低、稳定性高、抗干扰能力强,丰富的接口以及内部资源能够满足仿上肢机械臂控制系统功能的需求。
3.2 人体手臂姿态采集电路
采集端需要实时采集人体手臂的运动姿态,系统采用3组MPU6050六轴加速度计作为采集端的姿态传感器。MPU6050具有准确度高、质量轻、空间占有率小、功耗低等优点,在姿态测量和加速度测量等方面具有较好的优势[12]。
MPU6050与控制器STM32F407ZGT6之间的接线比较简单,通过I2C进行主从式通信,只需要两根数据线,外围电路比较简单,具体连接电路如图4所示,其中23脚SCL和24脚SDA是连接控制芯片的I2C接口,控制芯片通过I2C接口来与MPU6050进行通讯,采集出MPU6050数据,MPU6050始终为从属设备。3组MPU6050可以时刻采集手臂上所有关节的运动角度,通过角度的变化率来推算出人体手臂的运动轨迹。
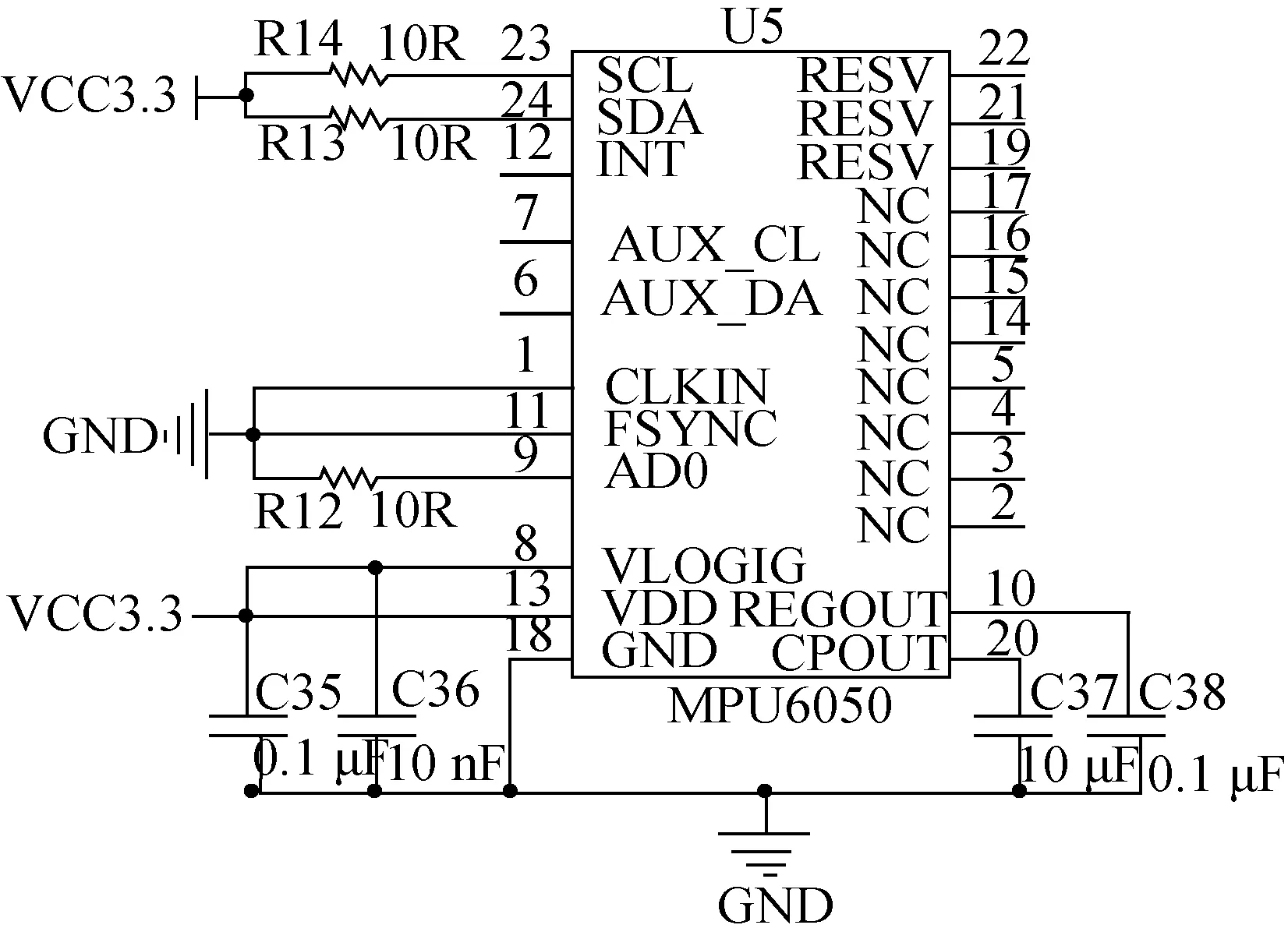
图4 MPU6050控制电路原理图
3.3 数据无线传输电路
系统选用SI4432无线收发芯片作为姿态采集端与机械臂控制端的通信,它包含了所有的ISM频段应用所需的发射和接收功能。与NRF905、NRF24L01、CC1101等无线模块相比,最大发射功率为+20 dBm,发射功率大,接收灵敏度极高,具有很高的性价比[13]。
SI4432与STM32F407ZGT6控制器之间采用SPI通讯方式,SPI为全双工通讯,数据传输速度快。SI4432模块接线图如图5所示,其中SPI_MOSI为STM32控制器到SI4432的串行数据传输;SPI_MISO为SI4432到STM32控制器的串行数据传输;SPI_SCLK为时钟信号,由控制芯片产生;SPI_NSS为使能信号,由控制芯片控制[14]。

图5 SI4432模块接线图
3.4 机械臂执行电路
舵机是实现机械臂动作的主要执行机构,考虑到系统的承载力、扭矩、控制等因素,选用6个高精度双轴LDX-218数字舵机组成机械臂运动执行部件[15],舵机实物如图6(a)所示。舵机输出轴的角度可以根据时基脉冲来控制,在0.5~2.5 ms的脉冲控制下,机械臂上舵机转动的角度范围为0°~180°,且输入信号和输出角度基本呈线性关系。6个舵机控制采用如图6(b)所示的接口与STM32控制器相应的I/O口进行连接,通过软件控制微控制器产生PWM信号,来控制6个舵机的运行角度,使机械臂完成仿上肢的动作功能。

(a) 舵机实物 (b) 舵机接线
4 系统软件设计
体感交互式仿上肢机械臂控制系统软件包括采集端手臂姿态采集、数据无线传输、机械臂控制端数据分析处理三大部分。接收端采用三组MPU6050对人体手臂的运动姿态进行采集。通过SI4432无线通讯和机械臂姿态接收端之间进行通讯。机械臂接收端负责姿态无线数据接收、指令解析和动作执行等功能,从而控制仿上肢机械臂完成人体手臂动作的模仿。仿上肢机械臂软件系统结构如图7所示。

图7 软件系统结构框图
软件设计中对3组MPU6050传感器分别初始化以及工作模式的配置,在操作系统初始化完成之后,开始手臂姿态测量采集任务,配置1号MPU6050测量数据为任务1,2号MPU6050测量数据为任务2,3号MPU6050测量数据为任务3,然后对各个任务进行数据查询采集,当某个任务点被触发,立即对该任务点姿态进行采集分析处理,最后将三组MPU6050数据封装,通过SI4432无线发送给机械臂控制端。采集端程序流程图如图8(a)所示。
机械臂控制端进行系统初始化之后,实时接收人体手臂姿态采集端的无线数据,将接收到的数据进行解包并转换为PWM信号,从而控制体感交互式仿上肢机械臂完成相应动作。机械臂控制端程序流程图如图8(b)所示。

(a) 姿态采集端流程图
5 试验结果及分析
将姿态采集端和接收控制端联合进行机械臂仿生试验,试验环境为模拟苹果的摘取动作。通过完成系统软件与硬件的基础配置,可以进行系统测试。设置上肢手臂佩戴的采集端为发送模式,并通过扎带与手臂相连,在机械臂执行端的控制器选择为接收模式。采集端对人体手臂姿态进行采集、处理,从而控制机械臂完成人体手臂跟踪动作。
试验分别找了5位测试者,对机械臂自由度中的腕关节屈/伸、腕关节外展/内敛、肘关节屈/伸、肘关节的外旋/内旋、肩关节的屈/伸、肩关节的外展/内敛运动分别做10°、20°、30°、40°的仿生试验,每个动作测试4次,共计480次试验,试验结果如表2所示。

表2 动作仿生识别结果Tab. 2 Results of action bionic recognition
由表2实际测试结果可知,系统接收执行端对仿人体机械臂动作的平均识别率为96%以上,执行端动作跟随的平均响应时间为2~3 s,能够按照人体上肢手臂的姿态做出相应的动作,可以较好地模仿人手腕、小臂与肘关节、大臂与肩关节动作,精确度和稳定性满足设计的要求。如图9所示人体胳膊直立状态的实际测试效果。

(a) 人体手臂姿态图 (b) 机械臂运动姿态图
6 结论
1) 设计并实现了一种多功能体感交互式仿上肢采摘机械臂系统,可通过人体手势控制机械臂做出相应的动作,实现机械臂同步模仿做出人类的采摘动作。利用D-H理论建立了体感交互式仿上肢机械臂的数学模型,以人体手臂运动轨迹为基础设计了仿生机械臂,并基于STM32实现了体感交互式仿上肢机械臂的控制功能。
2) 对机械臂进行了试验分析,可知仿生机械臂对人体机械臂的动作跟随响应时间为2~3 s,动作的平均识别率为96%以上,证明了机械臂设计的合理性和可行性。
3) 本文的研究成果为实现仿生六自由度机械臂模型提供参考,可实现人体远程操控机械臂,更好更高效地完成相应的工作,为拓展农业采摘机器人在农业生产中的应用提供技术支持,具有较大的研究和使用价值。
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05 08:25:38
今日农业(2020年14期)2020-12-14 19:47:34
电子制作(2019年13期)2020-01-14 03:15:20
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
电子制作(2017年13期)2017-12-15 09:00:05
制造业自动化(2017年2期)2017-03-20 14:26:08
金色少年(奇趣科普)(2016年8期)2016-09-21 02:07:58
我爱学(创意美术与手工)(2016年4期)2016-07-14 06:34:54
工业设计(2016年6期)2016-04-17 06:42:49