一种平滑式调制切换策略
2021-09-23 06:59张珏冰陈鸿蔚
通信电源技术 2021年9期
张珏冰 ,陈鸿蔚
(1.湘潭大学 自动化与电子信息学院,湖南 湘潭 411105;2.哈电风能有限公司,湖南 湘潭 411102;3.湘电股份电气传动事业部,湖南 湘潭 411104)
0 引 言
在交流牵引系统中,随着电力电子器件和微处理器的发展,对异步电机采用了矢量控制。变频器的输出是PWM电压波形,该波形在不同调制比及基波频率条件下的调制方式有所不同,基本上分为异步调制和同步调制。
异步调制是指载波频率保持不变,输出的脉冲数在单位时间内固定,不随频率变化而变化。异步调制时,功率器件IGBT的开关次数较高,对应的开关损耗也较高,但可以减小牵引电机的噪声。同步调制是指载波频率和输出的基波频率有对应关系,两者的比值(载波比)固定,其优点是可以降低IGBT的开关损耗,但可能会增加牵引电机的噪声。在交流异步牵引电机的控制系统中,为了降低损耗同时兼顾牵引电机的噪音,往往采用两种调制方式。但是如果从异步调制到同步调制切换过程中不能实现平滑过渡,则会导致牵引电机的电流出现畸变,严重时产生过流等故障,对系统的运行带来隐患[1]。
1 调制方式在控制系统中的应用
1.1 异步调制和同步调制
定义载波比N为:

式中,fc为载波频率,fs为调制波频率。
异步调制时,载波频率fc固定,不随调制波频率fs变化。由于载波比N是变换的,因此每个输出脉冲对应的电压相位不固定。
同步调制时,载波比N固定,载波频率fc随调制波频率fs变化,每个调制波周期内输出的脉冲波头数固定,每个脉冲输出的电压相位为:

式中,θ为电压相位,k为第k个脉冲(k=1,…,n),n为同步调制周期波头数。
1.2 调制方式的应用
在交流牵引系统中,逆变器的输出频率范围广,输出最高频率可达到近200 Hz。异步调制时,载波频率fc固定,逆变器每个输出频率对应的脉冲波头数是变化的,当输出频率较低时,对应的脉冲波头数较多,对输出电压的波形影响不大。但频率较高时,由于对应的脉冲波头数减少,往往导致调制波周期内1/4周期和正负半周期的波头数不对称,从而使得电压输出的相位在每个调制波周期随机变化,对电压输出的波形影响较大。
另外,异步调制时的载波频率fc较高,功率器件IGBT的开关损耗较大,对系统散热器件的要求也过高,导致散热系统体积相对较大。而同步调制的载波比N等于常数,每个波头的相位也是固定的,与调制波的频率无关,同时也降低了IGBT的开关损耗,因此在交流牵引系统中,逆变器往往采用两种调制方式相混合的模式。图1表示了某轨道交通用牵引逆变器的调制方式与输出频率的关系。

图1 调制频率和调制方式
在f1频率以下,系统采用异步调制,超过f1以后系统依次进入15脉波和9脉波同步调制,直至最后进入1脉波模式,即方波模式。
在这种模式下,低频时采用异步调制,每个调制波周期脉冲数足够,输出的电压波形基本没畸变,电流谐波小,牵引电机启动平滑无冲击。高频时采用同步调制,保证了每个频率周期的输出电压波头数,减少了因电压波形畸变产生的转矩波动[2]。
2 调制方式的切换
2.1 SVPWM调制
由于SVPWM是在传统SVPWM调制方法上叠加了三次谐波,因此电压利用率更高。受架线网等供电条件限值,为了更好地利用供电电压,一般牵引系统采用SVPWM调制方式[3]。对于图2的逆变器三相逆变电路,由于同一桥臂上下两个IGBT不能同时开通,因此逆变电路有8个开关状态。
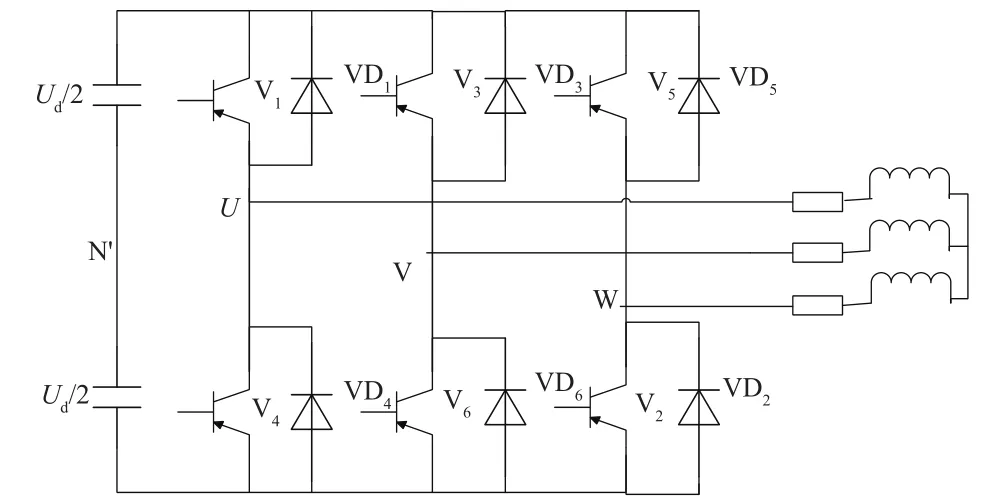
图2 三相逆变电路
在同一时刻,UVW三相上下桥臂不同开关组合时逆变器输出的空间电压矢量如表1所示,其中上桥臂开通为1,下桥臂开通为0。
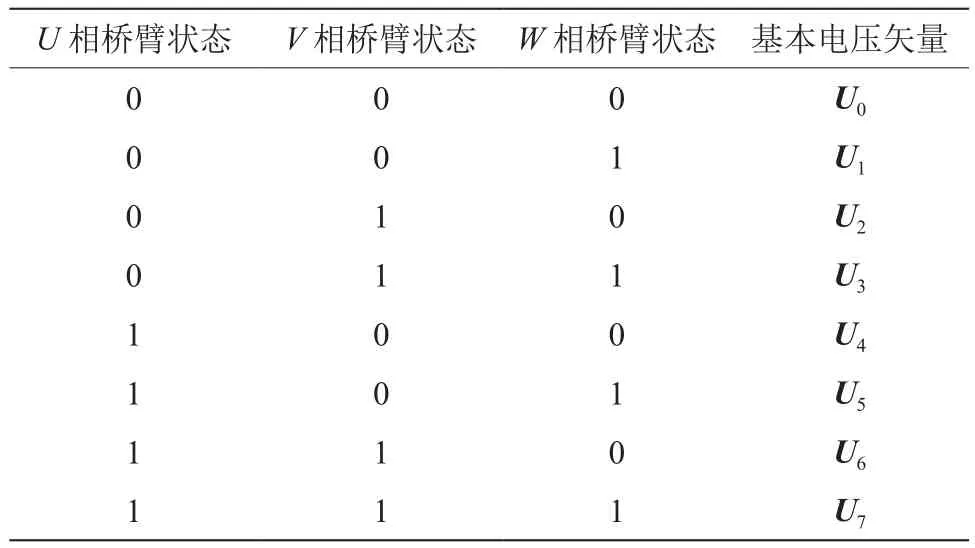
表1 桥臂状态及其相应基本矢量
表1中,U0(000)和U7(111)为零矢量。8个电压矢量对应的空间位置如图3所示。
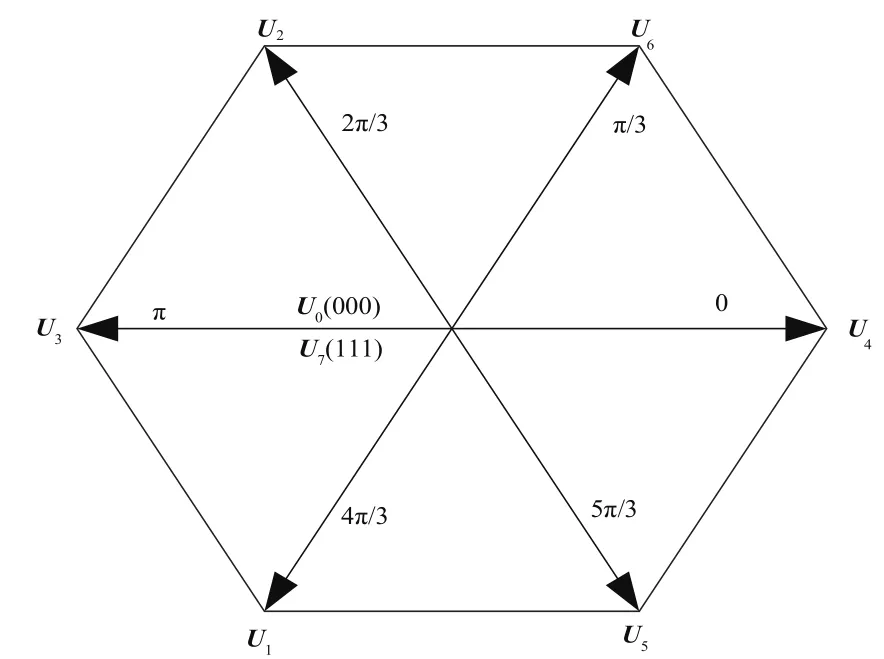
图3 8个基本电压矢量
8个电压矢量将整个电压矢量空间分为6个扇区。对于逆变器要求输出的任意电压矢量Us,由所在扇区的两个电压矢量和零矢量组成,图4所示为U4和U6扇区输出电压Us的示意。
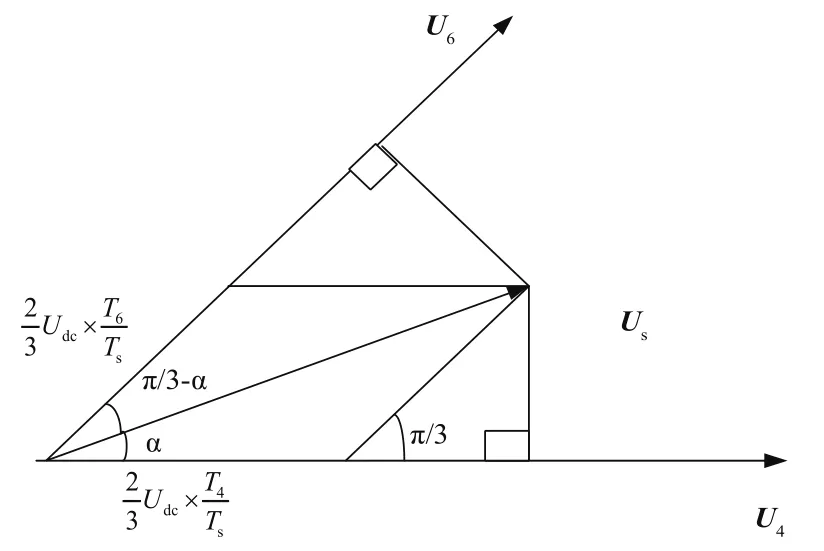
图4 输出电压矢量的组成
其中电压矢量U4和U6作用的时间T4和T6分别为:

式中:Ts为开关周期,也就是载波周期;|Us|为输出电压矢量幅值。不进入过调制的情况下,T6和T4之和不会大于Ts,此时用零矢量进行补充。逆变器各个桥臂的开关时间Ta、Tb以及Tc通过T6和T4计算得到,对应公式为:

由此可见,根据输出电压矢量扇区的不同,SVPWM调制是通过组成该扇区的电压矢量和零矢量的组合进而得到各桥臂的开关时间,从而输出控制牵引电机所需的电压[4]。
2.2 调制方式切换时的冲击
为了减少逆变器输出电压的谐波,降低电机输出转矩的波动,不管采用何种调制方法,都必须满足同步条件(三相电压是以2π为周期、相位为自变量的周期函数)、三相对称条件以及半波对称条件[5]。异步调制由于输出电压频率低,每个输出频率周期内波头数足够,可以不用考虑上述要求。在同步调制模式下,为了达到上述要求就必须满足下列条件[5]。
一是载波比必须是3的倍数,如9、15、21。二是输出电压相位必须满足式(2)的要求,即满足同步角的要求。当异步调制向同步调制模式转换时,如果强行将电压输出相位定位在同步角上,由于转换前输出电压的相位是随机的,因此导致转换输出电压前后相位差也是随机的,牵引电机电流极有可能将出现畸变,输出转矩出现突变,严重情况下将导致电机过流等故障[6,7]。
2.3 平滑切换策略
减少切换时的电流冲击,关键在于保证切换前后电压矢量的相位差不能过大也不能过小。针对该问题,本文提出了一种平滑切换策略。由文献[2]可以得知,同步比N是3的倍数,因此在半个输出频率周期内,每个扇区内包含N/3个同步角。在N为9时,各个同步角的空间位置如图5所示。

图5 N=9时的同步角
进入同步调制后,输出电压相位应定位在同步角上。假设进入同步调制指令发出前一刻的输出电压幅值为Uo1、电压相位为αo1,此时为第k个脉冲,则发出进入同步调制指令时该电压矢量与同步角度的相位差Δαk为:

在当前输出电压频率fs和开关周期Ts条件下,根据式(9)和式(10)可以预计出到达各个同步角度的开关周期数Tnumk以及到达各个同步角度时的输出电压相位与同步角度的差Δβk,对应公式为:
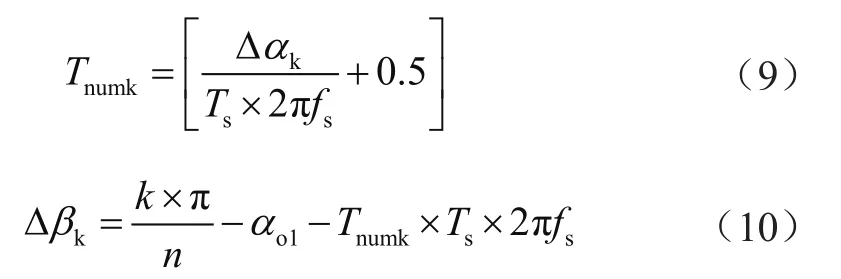
定义一个同步定位角度阈值γ,其取值应根据控制系统对转矩输出精度的要求设定,本文中选取γ为1o。对于Δβk,如果k=kloc时,有下式成立,则进入同步调制的条件成立,否则在下一个控制周期再进行判断。公式为:

如进入同步调制条件成立(k=kloc)时,根据相应的Δαkloc和Tnumkloc,修正载波周期为Tsys,三者的计算公式为:

根据新的载波周期Tsys,维持输出电压频率不变,经过Tnumkloc个载波周期后,电压的相位将准确定位在同步角度上,从而开始同步调制。
为了准确定位到同步角度,在满足式(11)到正式进入到同步调制,逆变器输出电压的频率需保持不变,考虑到牵引系统是一个大惯性系统且此时电机转速较高、调整时间小,因此对系统的控制性能的影响可以忽略。
为了防止电机工作在转换频率附近从而引进调制方式不停切换,采用滞环来决定转换的频率点,如图6。
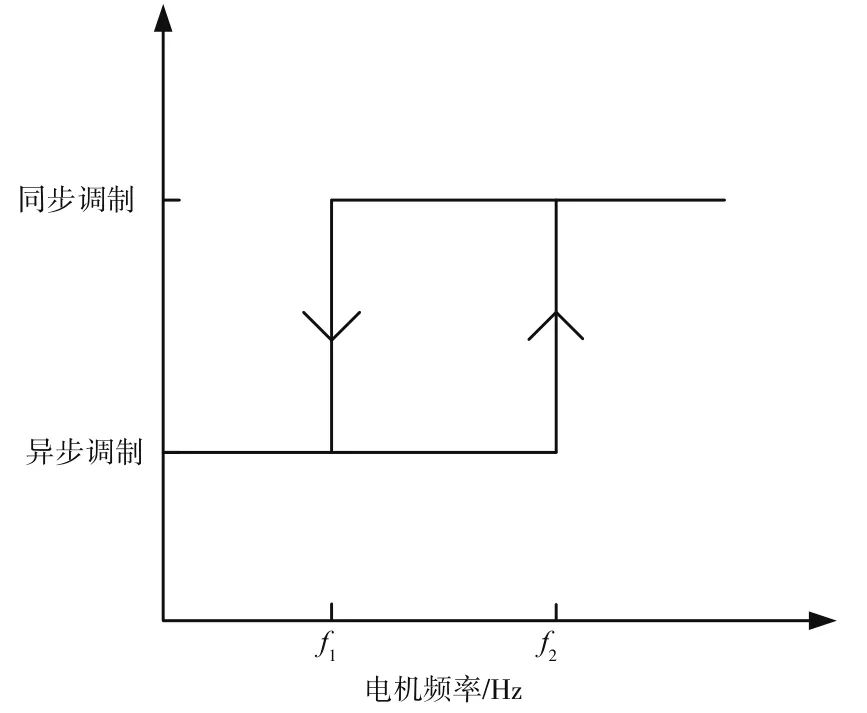
图6 滞 环
图6中,电机频率达到f2时,由异步调制进入同步调制,f1时由同步调制进入异步调制。f1应小于f2,频率间隔2 Hz左右。
3 仿真结果
采用MATLAB/Simulink搭建的交流异步牵引电机系统仿真模型[8,9]。模型中,额定功率为160 kW、额定电压为400 V、额定转速为1 500 r/min,电机控制采用转子磁场定位的矢量控制方法。调制方式切换点定义在22 Hz[10]。
图7为未采用平滑控制策略的调制方式切换的结果,可以看出在0.55 s切换时三相异步电动机定子电流ia、ib、ic有明显的突变,且电流有毛刺不平整。图8为采用平滑控制策略的调制方式切换的结果,在0.55 s切换时可以看出三相异步电动机定子电流无明显突变,电流毛刺消失。

图7 直接定位在同步角上的电流波形

图8 采用平滑式切换策略的电流波形
4 结 论
本文针对交流异步牵引系统调制方式由异步调制向同步调制切换时,由于电压相位突变导致电流产生畸变的现象,提出了一种平滑式切换策略。该方式根据输出电压相位与同步角度的差值来调整转换过程中的载波周期,从而最终将输出电压的相位精确定位在同步角度上。仿真表明,该方法能够实现在调制方式的平滑切换,电流不会畸变且计算简单。下一步工作将在试验平台上进行进一步的试验验证。
猜你喜欢
导航定位学报(2022年4期)2022-08-15
电子技术与软件工程(2022年6期)2022-07-07
雷达学报(2022年2期)2022-04-30
雷达学报(2022年2期)2022-04-30
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
中国空间科学技术(2021年1期)2021-03-16
汽车与驾驶维修(维修版)(2020年2期)2020-03-20
电机与控制学报(2018年9期)2018-05-14
移动通信(2017年11期)2017-06-20