
一种基于模糊逻辑智能控制的驾驶员模型
2021-09-23 09:45:02税永波韩中海
汽车实用技术 2021年17期
杨 浩,薛 锋,税永波,韩中海
(1.重庆工商职业学院,重庆 401520;2.中国汽车工程研究院股份有限公司,重庆 401122)
前言
驾驶员模型在人-车-路闭环系统中有着重要的作用。为了提高车辆的路径跟踪精度,基于智能控制方法,不同的学者分别建立了模糊逻辑智能控制驾驶员模型[1-3],神经网络驾驶员模型[4-6],模型预测驾驶员模型[7-8]。文献[1]以道路曲率半径作为约束条件,通过杠杆的原理与并联控制器的方法,获得了期望的方向盘转角,通过仿真验证表明,该模型运动过程平稳,适应于大曲率转向控制。文献[2]基于模糊逻辑控制器和PID控制的优点,建立了一种基于模糊PID控制理论的驾驶员模型,其仿真结果于车辆真实的行驶规程能较好吻合。文献[3]基于待定模糊规则参数,提出了一种驾驶员自适应神经模糊推理模型的建立与仿真,通过仿真验证表明,该模型与实际操作输出之间的拟合度更加理想。文献[4]基于驾驶员的记忆效应和模糊感知特性,建立了一种模糊感知时间窗的深度学习跟弛模型,该模型为异质交通行为仿真提供了一种有效方法。文献[5]建立了一种基于BP神经网络的驾驶员制动行为模型,通过仿真验证表明,该模型可以在辅助驾驶系统中进行广泛应用。文献[6]针对铰接式自卸车的转向特性,建立了一种基于驾驶员行为的神经网络无人驾驶控制方法,通过仿真验证可知,该模型收敛速度快,稳态特性好,具有良好的无人驾驶能力。文献[7]基于驾驶员需求转矩预测,通过模型预测控制算法,分别建立了一种基于驾驶员需求转矩预测的模型预测控制能量管理,通过仿真验证,该模型的燃油经济性有所提高。文献[8]基于模型预测控制和非线性二自由度车辆模型,建立了一种基于模型预测控制的人车鹿闭环系统模型,并对该模型进行了验证。以上方法在车辆动力学建模和路径跟踪方面取得了一定进展,但是缺少对真实驾驶员的推理决策进行分析。驾驶员的推理决策缺少有效的专家经验。基于以上分析,本文提出一种基于模糊逻辑智能控制的驾驶员模型。通过模糊规则和模糊推理,基于专家经验,对车辆转向进行控制。
1 模糊逻辑控制器
由于模糊逻辑智能控制不需要精确的数学模型,能较好的适用于非线性系统,因此,被广泛运用在智能车转向控制中。模糊逻辑智能控制主要分为,输入变化的模糊化,隶属度函数的选择,模糊规则的制定,解模糊化。其具体的流程图如以下图1所示。

图1 模糊逻辑控制器流程图
首先需要对输入的变量进行模糊化,经过模糊化之后,需要对输入的变量进行隶属度函数的选择,在选择隶属度函数时,可以选择三角函数和高斯函数等。确定好隶属度函数后,需要基于专家经验制定好模糊规则表,模糊规则表反映了驾驶员的推理决策能力,是整个模糊逻辑控制器的核心。由于车辆模型只能识别精确的数学量,而模糊逻辑控制器输出的是模糊量,因此,需要将模糊量转变为精确量,即解模糊化。模糊逻辑控制器解模糊化以后,可以得到精确的数学量,对车辆的方向盘转角进行输入控制。
1.1 模糊集合简介
模糊逻辑控制器首先需要讨论的是模糊集合与其表示的方法。首先假设模糊集合的全体研究对象为I,以I中的全体对象元素为构成的集合为U,这样可以定义在区间[0,1]上对应的映射为μA。则I属于U的隶属度函数可表示为μA,隶属度函数在一定程度上反映了集合中的元素隶属于该集合的程度。若隶属度函数取值为1,表示接近100%隶属于,如隶属度函数取值为0,则表示隶属度接近0。
1.2 隶属度函数
将模糊逻辑控制器的模糊量转变为精确量的一个重要环节是隶属度函数的选择。隶属度函数可以将模糊量进行定量描述,只有合理的选择隶属度函数,模糊逻辑的控制效果才能更好地适应用被控对象。常见的隶属度函数主要分为三角函数、高斯函数、梯形函数。对应一个标准的控制模型,其最优的隶属度函数具有唯一性,而真实的专家在进行隶属度函数的选择时有所差异,因此,隶属度函数的选择是具有主观性的客观定量方法。常见的模糊分布有3种,分别为正态型、戒上型、戒下型。模糊逻辑控制器在进行运算时,主要基于集合的运算规则。主要分为包含、并集、交集、补集等。
1.3 解模糊化
模糊逻辑控制器需要对输入的精确量进行模糊化,通过模糊规则制定进行推理,最后将模糊量进行解模糊化。其中模糊化的目的是将输入的精确数学量转变为模糊量,再通过相应的数学变换将模糊量变换到相对应的论域范围,并用隶属度函数来进行表示。
模糊逻辑控制器在进行模糊推理时,往往是由一系列的条件语句构成,如IF-Then结构。主要采用的方式有逻辑运算。基于对输入量进行模糊推理,根据专家经验来推理决策,其推理过程模拟了人的推理思维,虽然不同的模糊逻辑控制器的模糊规则有所差异,但是所控制的输出变量的收敛趋势是一致的。
由于车辆模型只能识别精确的数学量,而模糊逻辑智能控制输出的为模糊量,因此,需要将模糊量进行解模糊化。解模糊化的过程主要是将模糊量通过一定的规则变化到对应论域的精确量,然后将精确量用于被控对象。常用的解模糊化方法主要有重心法、最大值法、中心平均值法。不同的解模糊化方法侧重点不一样,其中最常用的是重心法解模糊化。当设计的模糊逻辑控制器较为复杂的时候,或者选择的模糊规则较多时,其制定的模糊规则较为复杂,此时可以选择中心平均值法。当设计的模糊逻辑控制器其制定的模糊语句较少,制定的模糊规则较简单,同时控制器输出的变量主要集中在所关心的较小区域时,我们可以选择最大值法。
2 基于模糊逻辑控制器的转向模型
本文以车速和侧向误差作为模糊逻辑控制器的输入,以方向盘转角作为模糊逻辑控制器的输出。由于我国高速公路上限定的车速最高为120 km/h。因此,设定模糊逻辑控制器的车速论域为0~120,基于车辆动力学仿真软件CarSim中目标路径与道路两边的边界距离为5 m,设定侧向误差为−5~5 m。参考实际车辆转向时,方向盘转角为−1.5~1.5圈之间,设定方向盘转角的论域为−540°~540°。基于以上分析,本文对车速v定义了4个语言变量,分别时零(ZE)为0~30 km/正小(PS)30~60 km,正中(PM)60~90 km,正大(PB)90~120 km。对侧向误差e定义了6个语言变量,分别为负大(NB)为−5~3 m、负小(NP)为−3~−1 m、零(ZE)为−1~1 m、正小(PS)1~3 m、正大(PB)3~5 m。方向盘转角δ的论域设计为7个语言变量,分别为负大(NB)为−60°~−40°,负中(NB)为−50°~−30°,负小−40°~−20°,零−20°~20°,正小20°~40°,正中30°~50°,正大40°~60°,将以上论域的范围有−60°~60°通过9倍增益来变换到−540°~540°的论域范围内。这样可以得到28条模糊逻辑规则,将模糊规则制定成模糊规则表。表1展示了模糊逻辑推理过程。如当车速较小时为ZE且侧向误差最大时,决策的方向盘转角为正向最大PM。其他模糊规则的推理过程类似。本文的隶属度函数选择较简单的三角函数,车速和侧向误差的隶属度函数如图2所示。
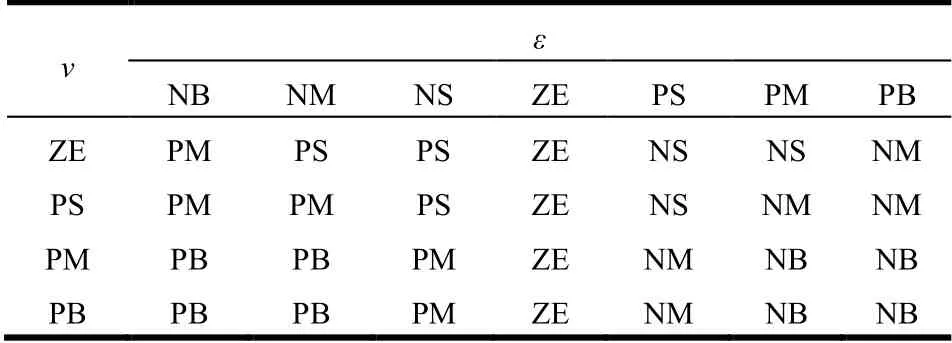
表1 模糊逻辑方向盘转角控制表
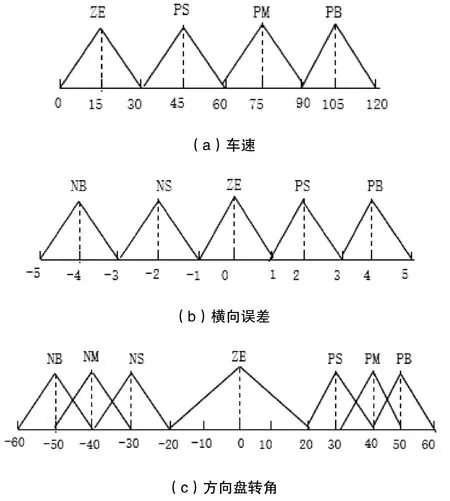
图2 隶属度函数
3 仿真验证
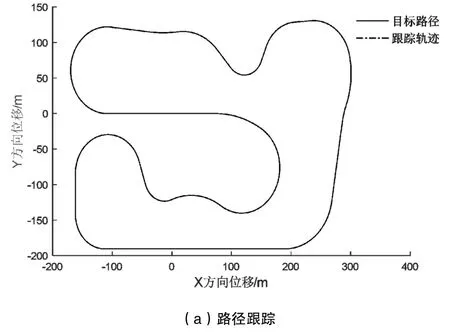
为了验证所建立的驾驶员模型在路径跟踪方面的精度,基于CarSim和MatLab/Simullink联合仿真平台对所建立的转向模型进行验证。仿真路径选择具有10个弯道的复杂路径,该路径可以测试车辆在不同曲率路径的跟踪效果,在一定程度上反映了驾驶员的综合转向性能,仿真车速设定为60 km/h。
复杂路径的仿真结果如图3所示,由(a)可知,所建模型的跟踪轨迹与目标路径趋于重合,表明该模型具有较高的路径跟踪效果,同时在整个路径跟踪过程中,跟踪轨迹没有发生跳变,表明所见模型具有较好的跟踪稳定性。由(b)可知,所见模型的轨迹跟踪侧向误差为−0.08~0.08 m,表明该模型的跟踪精度较高。由于仿真路径具有10个不同曲率的弯道组成,同时跟踪误差较小,表明该模型具有较好的跟踪适应性。
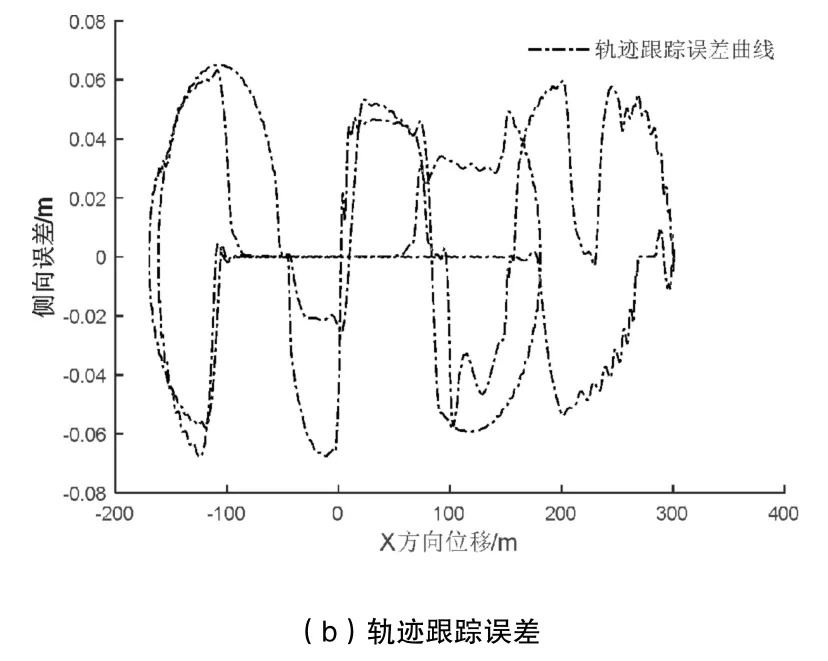
图3 复杂路跟踪结果
4 结束语
本文基于模糊逻辑智能控制不需要精确的数学模型,能很好地适用于非线性系统,建立以侧向误差和车速的二维输入变量,方向盘转角为一维的输出变量控制模型。通过仿真验证,所建立的驾驶员模型能较好地适应于非线性系统,可有效提高车辆路径跟踪的精度,增强路径跟踪的适应性和稳 定性。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
成都信息工程大学学报(2021年6期)2021-02-12 03:00:52
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
测控技术(2018年10期)2018-11-25 09:35:52
解放军健康(2017年5期)2017-08-01 06:27:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
广东石油化工学院学报(2016年3期)2016-05-17 05:17:10
电源技术(2016年2期)2016-02-27 09:04:56
