
双梭型SLD探测器结冰特性研究
2021-09-23 03:20章儒宸葛俊锋范博龙
民用飞机设计与研究 2021年2期
章儒宸 葛俊锋 桂 康 肖 汀 范博龙 叶 林
(1.上海飞机设计研究院,上海 201210; 2. 华中科技大学人工智能与自动化学院,武汉 430074)
0 引言
2015年起,美国联邦航空管理局(FAA)及欧洲航空安全局(EASA)的适航条例修正案相继生效,强制要求新设计的相关航空器具备识别或承受过冷大水滴(Supercooled Large Droplet,简称SLD)结冰环境的能力。在迫切的实际需求牵引下,相关机构已围绕SLD结冰防护问题进行了大量研究,主要研究成果集中在SLD结冰条件下的机理及危害分析领域。同时,国际上已经有多种基于不同原理的SLD结冰探测方法见诸报道,按照不同类别的探测技术可分为五大类,即目测式方法、增布传感器方法、气动性能监测方法、雷达探测方法以及探头式方法。其中,目测式方法需要依靠飞行员对机外探冰杆等位置处在常规条件和SLD结冰条件下的结冰信息作出区分,极大程度上取决于飞行员的经验和主观判断,只能作为辅助手段;增补传感器法通常需要在易遭受SLD结冰的部位,如机翼表面的溢流区甚至是防护区之外加装齐平保形式的传感器,该方法对于SLD结冰条件的探测较为直接,且技术手段相对成熟,主流的方式按照探测机理可分为光纤式和压电平膜式等,但由于结冰区域易受到环境因素的影响而变化,因此对安装位置的选择要求较高,需要在精确计算和大量试验之后选择不同的位置进行布置,进而增加了系统复杂度和安装成本;雷达探测法通过在飞机上安装微波或激光雷达,探测飞机前端云层的过冷水滴或冰晶含量,实现对飞机结冰环境的预警探测,该方法突破了传统结冰探测技术的束缚,具有良好的研究前景和技术方向,然而相关研究结果表明,雷达探测方法受较多因素影响,难以在复杂的小水滴背景下进行大水滴探测,在短期内满足国际适航要求的可能性较低。
探头式探测技术为目前主流民航或运输类机型所采用,其用于探测常规水滴结冰条件的技术手段已相当成熟,但针对SLD结冰探测的探头型结冰探测技术尚待研究和探索,目前该类新型探头式结冰探测技术按照其方法特点可大致分为基于水滴特性和基于溢流特性的两种检测方法。水滴轨迹检测方法的基本思路是,在过冷水滴结冰气象条件中,较高的温度及较大的中位体积直径(Median Volume Diameter,简称MVD)使SLD具有独特的撞击轨迹,探头式方法利用特殊构型的探头与结冰传感器,依靠常规水滴与SLD的撞击位置或溢流特性的差异,实现二者的区分。但采用探头型结冰探测技术,对于不同气动外形的探头表面,其区分SLD结冰条件的能力和有效性还有待检验。因此,本文将针对一种基于双梭外形的探头式SLD结冰探测器,结合边界层理论和SLD在运动轨迹和撞击区域方面的特性,详细分析其设计原理;随后运用全三维通用结冰仿真软件FENSAP-ICE对该特殊气动外形的探头表面进行结冰模拟计算,并与该探头构型试验件在冰风洞中通过光纤传感器采集到的结冰信息进行对比,初步验证双梭型探头能够检测并区分SLD条件的能力。
1 双梭型SLD探测器设计原理
在过冷水滴结冰气象条件中,较高的温度、较大的水滴直径使SLD具有独特的撞击轨迹与溢流性质。探头式方法利用特殊构型的探头与结冰传感器,依靠常规水滴与SLD的撞击位置或溢流特性的差异,实现二者的区分。具体而言,双梭外形探头的设计思路是依据边界层理论中的黏性力上升原理,增大常规水滴在探头特定区域周围理想绕流的边界层厚度,同时使SLD能够撞击探头特定区域,以此区分常规水滴与SLD。边界层速度厚度δ
(x
)与雷诺数Re及前缘距离x
有直接关联:
(1)
如图1所示,在此设计思路下,常规水滴撞击探头斜面A后将直接结冰,而SLD在撞击斜面A后将产生破碎、溢流的现象,液态水比例明显增加。

图1 双梭型探头设计原理示意图
另外,常规水滴的运动轨迹则因受边界层黏性力影响较大,其理想绕流沿探头表面法向向外推移,阻碍了绝大部分的常规水滴撞击斜面B;而SLD由于受自身惯性力影响大于空气黏性力,在表面张力和空气剪切力作用下会产生变形,通常用韦伯数We
对SLD的运动特性进行描述,定义为大水滴惯性力与表面张力的比值:
(2)
SLD的阻力模型不再满足刚性球体的假设,很大程度取决于受力之后的变形效应,因此其中一部分从斜面A溢流并受气流影响在涡区结冰,另一部分SLD,保持原有的运动轨迹,直接撞击到探头斜面B并结冰。依据上述原理,探头表面SLD结冰与常规结冰的差异主要体现于斜面A及斜面B的水收集和相对结冰情况,通过构建基于多源传感器融合的结冰量识别模型,即可实现对SLD结冰环境的监测和区分。
2 结冰特性数值计算方法
2.1 流场计算
空气流场计算是结冰数值模拟的第一步,通过在物体附近布置空间网格,用于求解非定常Navier-Stokes方程,湍流模型采用Spalart-Allmaras模型。空气流场的计算结果都将用于后续水滴运动轨迹以及结冰流换热系数的计算。
2.2 水滴计算
水滴运动轨迹采用欧拉法进行计算,水滴的控制方程如下:
其中
U={uvw}
(4)
F={αuuuuvuw}
(5)
F={0 u-uv-vw-w}
(6)
式中,α为水滴容积分数,u为水滴速度矢量,v为空气速度矢量。
C为阻力系数,对于常规水滴:

(7)
对于SLD
而言,在运动过程中会从球形逐渐向扁圆盘形变化,需要对阻力模型进行修正。FENSAP
软件中提供的方法为将球体阻力系数C与扁圆盘阻力系数C进行加权平均:C
,=eC
,+(1-e
)C
,(8)
其中C可由式(7)得到,而C与e的表达式如下:

(9)

(10)
当水滴运动韦伯数We>13时,大水滴将发生破碎现象,认为分裂后水滴速度的大小与方向不变,而新生成水滴的尺寸则由下式计算得到:

(11)
2.3 结冰热力学模型
在过冷水滴撞击到部件表面之后,需要对结冰表面划分若干个控制体,建立基于Messinger
理论的质量和能力平衡方程,FENSAP
软件中采用的基于三维水膜流动的结冰热力学模型如图2所示。
图2 水膜理论结冰热力学模型
在控制体中,由于撞击收集到的过冷水滴一部分会产生蒸发、结冰、升华等相变过程,另一部分在空气剪切力或体积力的作用下向后溢流,水膜的流动速度认为与单元格坐标点位置x=(x1,x2)和与壁面的法向距离y有关:

(12)
部件表面的水膜控制体质量方程及能量输运方程如下:

(13)

质量方程中的非稳态项由水膜高度的变化率构成,对流项由水膜速度与水膜高度的乘积构成,等式右侧的源项分别为水滴撞击的收集量、水膜表面蒸发量和结冰量;能量方程中的非稳态项由水膜高度变化所带来的能量变换构成,对流项由水膜速度与水膜能量的乘积构成,等式右侧的非稳态项由水滴撞击带来的能量、蒸发带走的潜热、结冰带来的潜热和对流换热带走的潜热构成。


(15)
上述不等式提供的约束条件能够保证在表面温度低于冰点温度的情况下没有液态水膜的存在,并且在高于冰点温度的情况下不存在结冰,联立求解式(13)~(15)可得到某一时刻部件表面结冰量、温度和水膜厚度。
本文采用FENSAP
-ICE
软件中的FENSAP
模块、DROP
3D
、ICE
3D
分别进行流场、水滴场和结冰量计算,计算流程如图3所示。
图3 计算流程
3 SLD探测器结冰特性仿真
3.1 计算模型及网格划分
双梭型探测器二维截面尺寸如图4所示,外形沿中心轴线上下对称,长度为141mm
,展向拉伸长度为90mm
,头部前段斜面与中心轴线角度约为35°,后部斜面为15°,为了增加边界层厚度,使得SLD
运动轨迹和常规水滴能够区分,探测器头部、前后部斜面最高点及负压涡区位置均做圆角处理,同时后部斜面最高点位置比前段高6.5mm
,用以捕捉SLD
。该构型探测器外形及面网格如图5所示,外部计算域取半径为1.5m
,展向(z轴方向)拉伸长度为0.09m
的圆柱域,计算域两侧面设置为对称面,拉伸面设为压力远场,探测器表面设为无滑移壁面。
图4 探测器二维截面尺寸
图5 探测器几何模型
图6显示了计算域的网格分布,外流场网格采用远场四面体、近壁面棱柱单元的混合网格,探测器表面附近进行近壁处理,具体参数如表1所示。

表1 外流场网格参数

图6 计算域网格
3.2 计算工况
结冰气象条件设置:0°攻角,来流速度为60m/s
,环境压力为75 000Pa
,环境温度263.15K
,水滴直径(MVD
)分别取15、34、70、250,液态水含量(LWC
)根据其与温度和水滴直径的对应关系,从CCAR
25部附录C
及附录O
中确定,结冰时间为90s
,具体计算条件如表2所示。
表2 计算条件
3.3 水滴收集计算结果
水滴撞击特性计算为积冰计算提供表面水收集系数、撞击极限等参数。这些参数是积冰计算的输入参数,使用FENSAP
软件的DROP
3D
模块对双梭型探测器构型进行表面水滴收集系数的求解,使用初始空气流场算得的结果,分别输入四种工况下的MVD
和LWC
。计算时,对MVD
为15 和34 的工况设置为常规水滴;对MVD
为70m
和250 的工况激活SLD
模型,并选择相应的阻力模型和水滴分布尺度。四种工况下的水滴特性计算结果如图7~图12所示。

图7 工况1(15 )表面水收集系数(左)及液态水含量(LWC)分布(右)

图8 工况2(34 )表面水收集系数(左)及液态水含量(LWC)分布(右)
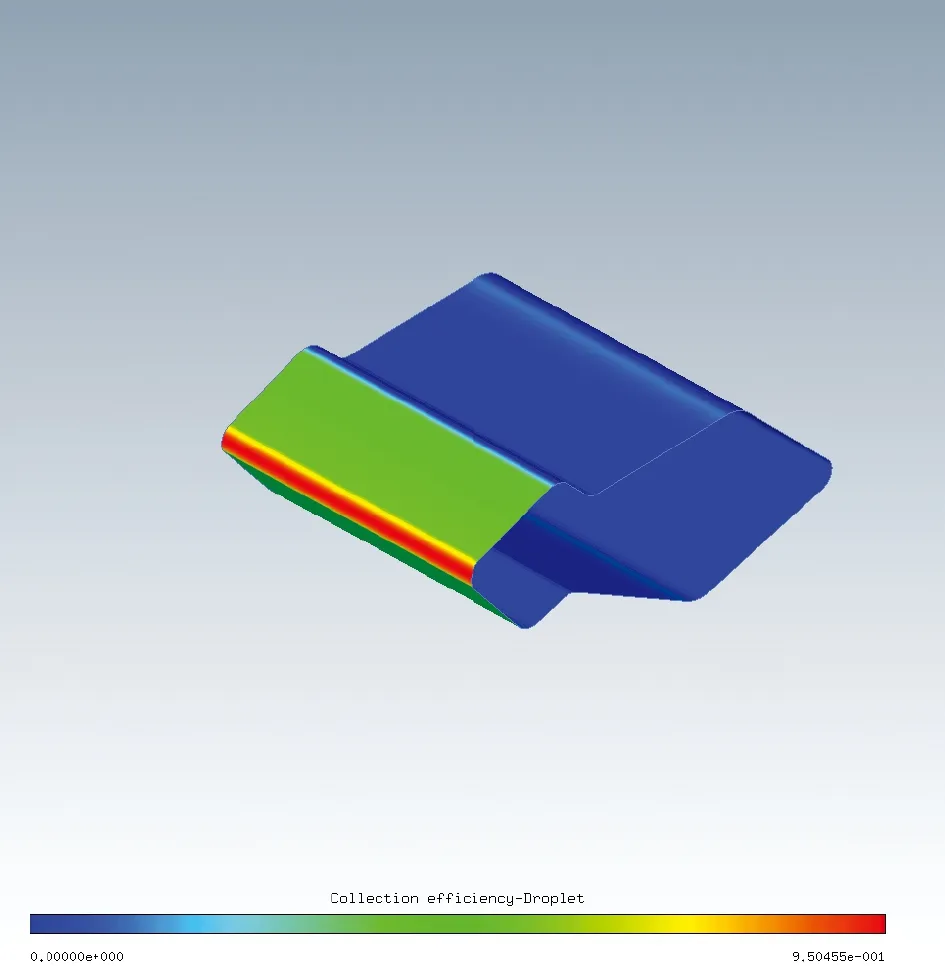
图9 工况3(70 )表面水收集系数
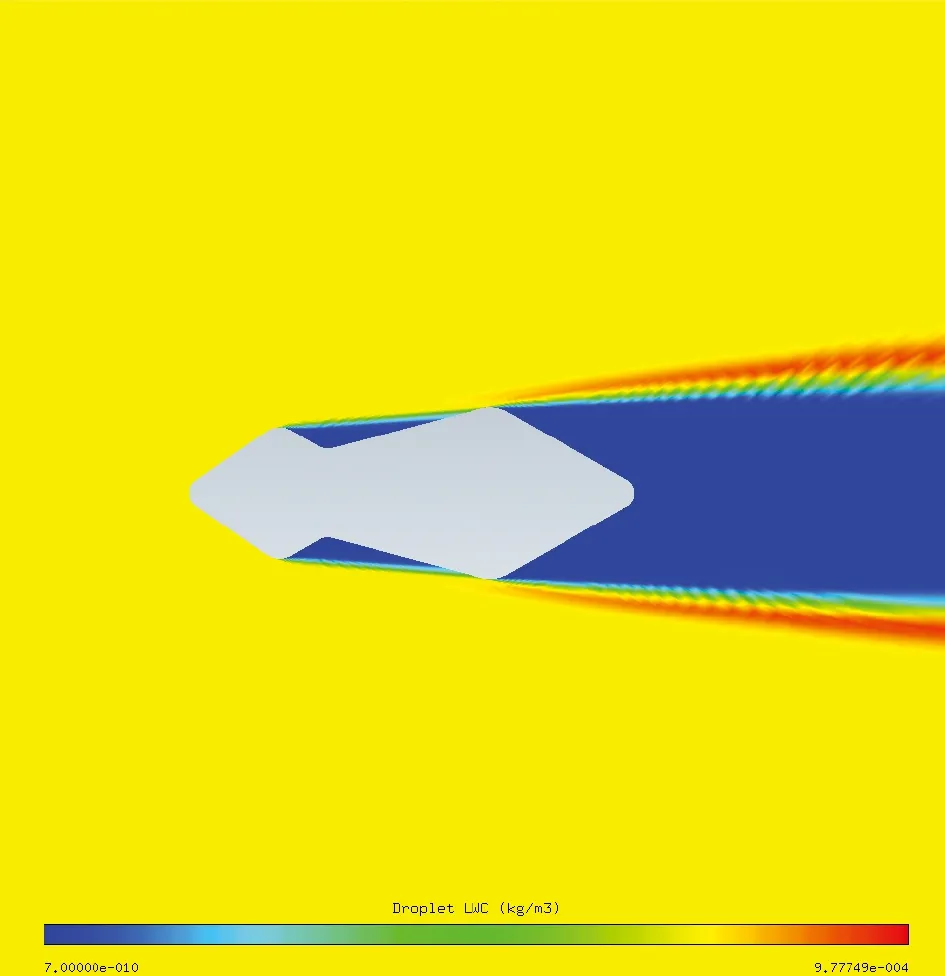
图10 工况3(70 )液态水含量(LWC)分布

图11 工况4(250 )表面水收集系数分布

图12 工况4(250 )液态水含量(LWC)分布
由计算结果可以看出工况1、工况2水滴直径分别为15μm
和34μm
的情况下,水滴撞击在探头构型的第一个迎风面上,第二个迎风面在水滴遮蔽范围之内,并无收集;工况3、工况4水滴直径分别为70μm
和250μm
的情况下,水滴撞击区域扩大到了探头构型的第二个迎风面,并且随着水滴粒径的增加,第二个迎风面处的水滴撞击范围和收集率也在增加。图13给出了工况1~工况4在探头构型展向中间位置的水收集系数二维曲线。

图13 不同工况水收集系数对比
可以看出,相比常规水滴直径的工况1(15 )和工况2(34 ),工况3(70 )和工况4(250 )的收集系数和峰值明显较大,且随着水滴粒径的增加,在第一个迎风面处的表面收集率逐渐趋于均匀,这是由于SLD
本身的运动特性使得水滴轨迹受空气流线作用较小,几乎全部撞击在迎风表面上。当水滴直径大于70 时,撞击区域开始扩展到第二个迎风面的上下表面。3.4 结冰计算结果
使用FENSAP
软件的ICE
3D
模块进行探头构型结冰量及分布的计算,基于空气流场的热流和剪切力的结果,以及水滴场的计算结果输入,分别计算四种工况下的结冰特性。计算时,根据结冰工况条件选择对应的Glaze
Ice
(明冰)模型;此外,由于结冰粗糙度对冰型特征和结冰量影响较大,还需开启等效沙粒粗糙度模型对流场的对流换热系数和剪切力进行相应的修正。四种工况下的结冰特性计算结果如图14~图19所示:
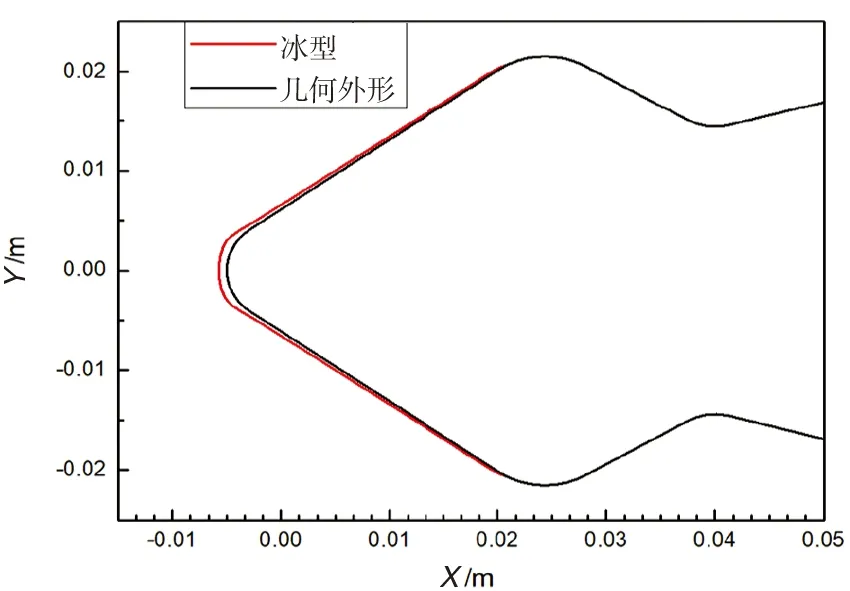
图14 工况1(15 )头部冰型结果

图15 工况2(34 )头部冰型结果

图16 工况3(70 )头部冰型结果
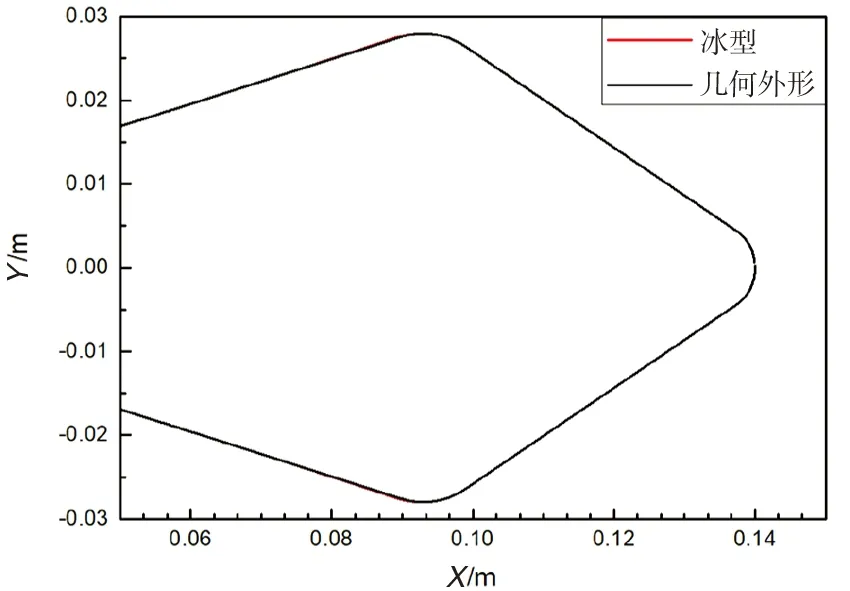
图17 工况3(70 )后部冰型结果

图18 工况4(250 )头部冰型结果

图19 工况4(250 )后部冰型结果
由计算结果可以看出,四种工况下的探测器表面结冰分布与水滴收集的分布一致,工况1(15 )和工况2(34 )仅在头部位置结冰,随着水滴直径的增加,头部位置的结冰量和结冰范围不断增加;工况3(70 )、工况4(250 )的结冰范围扩展到了探测器的后部迎风面位置。
3.5 带攻角条件下结冰特性分析
由于在真实飞行条件下的不同飞行阶段中往往会根据飞机性能的要求调整飞行姿态,其中俯仰方向的变化会导致飞机攻角的产生,当双梭构型探头对称面轴线与来流方向存在一定的攻角时,常规水滴与大水滴气象条件下的结冰分布特性与0°攻角时会存在差异,下面将选取3个不同飞行阶段中的典型结冰气象工况点分别进行计算,具体计算条件如表3所示。

表3 带攻角计算条件
图20~图25分别计算了直径为34μm
和250μm
的水滴在待机、爬升和下降三种飞行阶段中带攻角的情况下水滴收集和冰型分布的计算结果对比。
图20 待机工况(攻角4.8°)液态水含量分布34 μm(左)250 μm(右)

图21 爬升工况(攻角13.2°)液态水含量分布34 μm(左)250 μm(右)

图22 下降工况(攻角0.8°)液态水含量分布34 μm(左)250 μm(右)


图23 待机工况(攻角4.8°)冰型分布结果34 μm(上)直径250 μm(下)


图24 爬升工况(攻角13.2°)表面水收集系数分布34 μm(上)250 μm(下)


图25 下降工况(攻角0.8°)冰型分布结果34 μm(上)250 μm(下)
在小攻角(0.8°)下降工况时,该探头构型的水滴收集分布与冰型结果受攻角的影响较小,其分布特征与0°时非常接近;在处于待机工况(4.8°)时,常规水滴(34μm
)运动轨迹在下表面与后部斜面距离逐渐接近,但仍未产生收集,此时大水滴(250μm
)在上表面后部斜面已形成水滴遮蔽区,结冰分布全部位于下表面后部斜面;在处于大攻角(13.2°)爬升工况时,常规水滴(34μm
)开始撞击到后部斜面位置,并形成少量结冰,大水滴(250μm
)的结冰区域仍全部位于下表面,但分布范围扩展到了头部的背风面位置,在负压涡区同样形成了结冰。综合上述计算结果可以看出,在带攻角的条件下飞行时,该探头构型的结冰分布特性产生了一定程度的变化,随着攻角的增加,常规水滴也会在后部斜面位置形成结冰,仅通过后部斜面是否结冰无法区分大水滴与常规结冰条件,需要引入更多位置的结冰分布和结冰量特征,如头部背风面、负压涡区以及攻角信号综合进行判断。
4 探测器冰风洞试验
4.1 试验说明
根据上述仿真计算结果,双梭型探头能够使得不同水滴直径的撞击区域不同,通过计算在后部第二迎风面位置处的结冰量及分布可以初步判断是否存在SLD
结冰条件。为了得到探测器表面结冰特性更精确的结果,需要对其进行冰风洞试验以验证该探头构型在特定工况条件下区分SLD
与常规水滴的能力。试验中使用了在探头表面布置光纤传感器的方法测量结冰厚度及其分布,光纤结冰传感器属于一种基于光反射及散射原理的光强调制型传感器,图26为楔形光纤结冰传感器基本原理示意图,由LED
光源发射的近红外光从玻璃光纤束出射至探测端面。当探测端面发生结冰现象时,出射光将在冰层内经历折射、反射、散射、吸收等过程。部分反射光及散射光进入接收光纤束,其末端的光电管阵列对耦合光束的强度进行探测,传感器依据信号幅值大小判断结冰情况。
图26 楔形光纤结冰传感器原理示意图
光纤传感器的布置位置如图27所示,传感器1安装在探头前段头部区域,传感器2和3分别位于探测器的第一和第二迎风斜面上,在遭遇结冰气象条件时,传感器1能够保证结冰探测系统的告警触发,该位置处的结冰量最大,在遭遇SLD
条件时传感器2和3位置处将会触发结冰信号。
图27 光纤传感器的安装位置
4.2 试验结果
冰风洞试验在四川绵阳中国空气动力研究中心风洞进行,具体为0.3m
×0.2m
引导性结冰风洞。探测器模型为1∶1,探测器固定于风洞试验段的平台上,光纤传感器的测量系统与外部计算机相连,用于记录接受光纤的电压信号从而转换为结冰厚度,对表2中的状态1和状态3分别进行了试验,试验结果如图28~图31所示。
图28 工况1(15 )三路光纤输出电压信号
图28和图30中输出电压信号的光纤传感器共有3个,分别用V
1、V
2、V
3表示,其中实线代表第一路接收光纤的信号,用于探测表面是否存在结冰;虚线代表第二路接收光纤的信号,用于测量结冰厚度。图29和图31体现了探测器表面的结冰分布情况。综合图28和图29中光纤输出电压信号以及探测器表面结冰情况,对于常规水滴结冰条件,结冰区域集中在探测器头部及第一迎风面的位置处,且V
1处的结冰厚度相比V
2较大,探测器后部斜面几乎无结冰;图30和图31则反映了SLD
结冰条件下的表面结冰情况,此时位于后部斜面的V
3传感器有明显的结冰信号输出,且结冰厚度大于V
1和V
2的位置。
图29 工况1(15 )探头表面结冰分布

图30 工况3(70 )三路光纤输出电压信号

图31 工况3(70 )探头表面结冰分布
4.3 试验与仿真对比分析
根据图27中传感器安装的三个位置进行结冰厚度的仿真结果与试验对比,对比结果如图32和图33所示。

图32 常规水滴(15 )结冰厚度对比
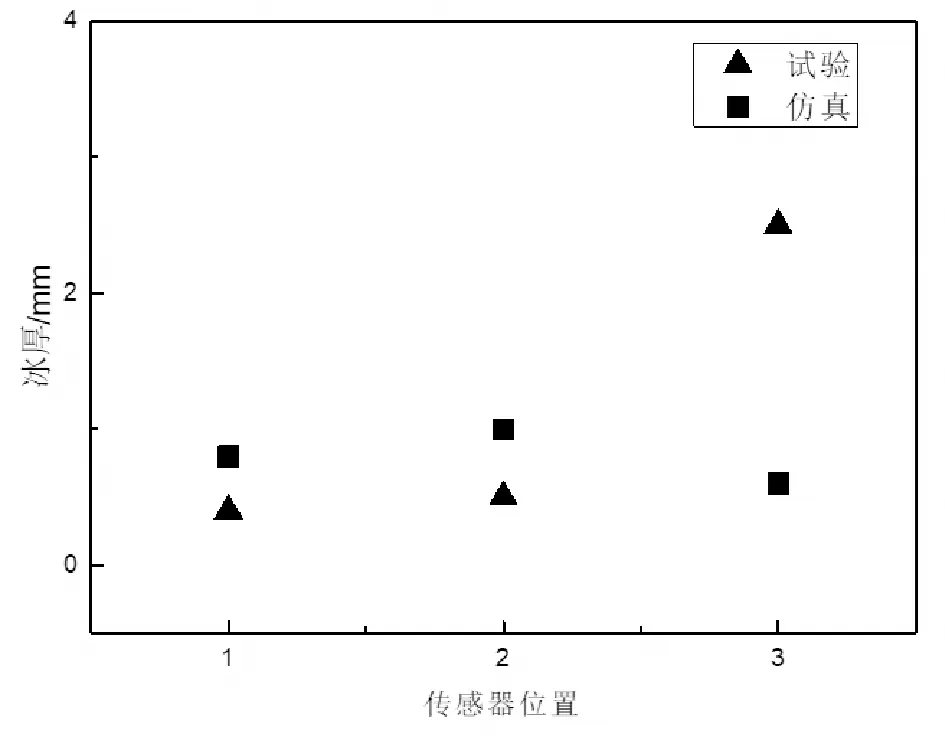
图33 大水滴(70 )结冰厚度对比
由图32和图33可以看出,仿真结果和试验在结冰厚度方面存在一定的误差,常规水滴条件下仿真结果低于试验,大水滴条件下则位置1和位置2处高于试验,位置3处低于试验结果。分析可能产生误差的原因,具体为在冰风洞中进行的试验具有一定的地面效应,导致探头表面沿展向分布并不均匀。由图33可以看出,实际冰厚从探测器固定端向上逐渐偏大,因此在位置1和位置2处的结冰厚度试验高于仿真结果;SLD
条件下的分布情况则正好相反,试验中位置1和位置2处的位置1和位置2处的结冰厚度相比常规水滴均有所减少,且均小于探测器后部迎风面位置3处的结冰量,原因在于高温低速下的明冰工况条件以及大水滴可能产生的破碎、飞溅和反弹效应使得水滴在撞击至表面之后并未立即冻结,而是继续向后溢流,由图31也可以看出,大水滴的溢流位置在前部迎风面的背部斜面上。5 结论
1)双梭型探测器在常规水滴和大水滴条件下的结冰特性具有明显的区别,仿真和试验结果表明可以通过探测器不同位置处的结冰情况判断是否存在SLD
结冰条件,具备一定的区分两种结冰条件的能力。2)仿真计算的冰厚结果相比试验有一定的差距,且并未体现由于SLD
产生的溢流效应导致探测器后部迎风面位置处的结冰量明显高于头部及前部迎风面的现象,后续应对计算域划分进行修正,使其符合实际风洞的流场环境,并加入SLD
破碎、飞溅和反弹的细化模型。需要说明的是,试验和仿真结果只能正向表征两种结冰条件下该探头构型的结冰特性,但对于判断多种复杂结冰气象条件下是否存在SLD
条件的区分能力和区分标准仍有待探究,需要对其外形进行参数化优化设计,并建立相应的区分指标参数。