
室内外一体化导航研究综述
2021-09-22 09:18陈慧徐传旺郑加柱沈怡静
科学大众·教师版 2021年11期
陈慧 徐传旺 郑加柱 沈怡静

摘 要:随着信息化时代的迅猛发展,卫星定位解决了室外定位导航的问题,然而大型室内场所越来越多,室内的定位导航需求日趋强烈。本文首先介绍了室内外一体化导航的技术路线,然后对当前主要的一体化定位导航技术进行了阐述,最后总结了目前室内外一体化导航技术存在的一些亟待解决的问题,以此为进一步研究内外一体化导航提供技术指导。
关键词:室内外一体化; 导航; 定位; 模型
中图分类号:TP271+.5 文献标识码:A 文章编号:1006-3315(2021)11-126-003
伴随着城市化进程的不断推进,信息与自动化技术的发展以及互联网的迅速崛起,人们的移动变得更复杂多变,对于空间信息技术的需求也在日益增加[1]。但随着城市人口的持续增长,使建筑越来越密集,精细。目前,室外导航技术发展日趋成熟,而由于建筑内部空间结构复杂、精度要求高,对室内空间信息分析方面的研究进展较为缓慢,但人们的室内活动却日益增长,单一的定位导航源往往达不到人们所需的精度要求,也不具备足够好的可靠性和鲁棒性。因此需要研究出集成多种定位技术,可在室内定位、室外定位以及室内外交界处等多场景使用的室内外一体化导航。
本文首先介绍了室内外一体化导航的技术路线,然后对室内外导航采用的关键技术作了详细介绍,最后对室内外一体化导航的难点和未来的发展趋势进行总结。
1.室内外一体化导航的技术路线
实现一体化导航大致可以分两个方向,一种是在室外采用GNSS技术进行导航定位,室内建筑建立三维模型[2],并通过采集有价值的属性、语义、场景等信息,将三维模型可视化处理,室内定位采用WIFI、蓝牙或超宽带等高精度的定位[3]。在室内外交界处,通过判断室内外场景,利用切换定位方法来满足不同场景的定位精度需要;另一种是在室内无线定位技术的支持下,将两种室内外模型的融合以及定位数据的融合,通过提取室内外融合模型的路网进行路径规划[4],实现室内外一体化的导航。实现一体化导航的技术路线图见图1。
2.室内外一体化导航关键技术
2.1可视化建模
二维地图的导航应用已经普及,对于室内三维模型的建立,不仅要表达出更精细化的模型,还要不断提高模型与现实场景的匹配度。室内三维地图模型通常是采用BIM建模,虽然BIM模型本身具有直观、清晰等许多特点,但为了提高模型的几何精度,还需要对模型进行可视化处理[5]。
BIM模型注重对材质、属性、语义、纹理等全要素信息进行呈现,而可视化是为了注重BIM模型的几何表达,模型可视化处理后,更便于用户对路径的搜索和选择。
室外三維模型的建立通常采用倾斜摄影建立三维模型[6],目前用来对大区域建模的工具很多,如大疆智图、ContextCapture等。
三维模型建立完成后,在使用过程中,还要进行不断的数据更新和维护,才能确保室内导航定位的高效性。
2.2模型融合
构建室内外一体化的三维实景模型。室外采用无人机倾斜摄影三维模型,室内以室外三维模型做底图,在此基础上叠加BIM模型[7]。
无人机倾斜摄影建立的模型根据影像的数目、大小,在进行建模时会有一定的精度损失,造成空洞、扭曲等问题,可以适当的融合地面摄影或者三维激光扫描来弥补。对于室外的三维模型,建好后需要对模型进行单体化分割[8],标注语义、属性等信息。BIM虽然有优势,但不能与外部环境联系起来进行空间分析,而GIS的空间分析功能可以弥补这一缺失。运用BIM和GIS技术[9],可以把建筑物、道路、设备等信息融合在一起,将这些信息数据集成存储到数据库中,构建一个智能管理系统,便于在室内与外部环境之间更好的切换。
2.3室内外定位
定位分为室外定位和室内定位。室外定位可采用全天候、高精度的全球卫星导航定位系统(GNSS),GNSS以我国的北斗系统、美国的GPS系统、俄罗斯的GLONASS系统和欧盟的Galileo系统为代表[10]。目前主要采用北斗和GPS。
室内定位是指在室内环境中实现位置定位,主要采用无线信号通讯、基站定位、惯导定位等多种技术集成形成一套室内位置定位体系,从而实时获取人员、物体等在室内空间中的位置。
室内定位技术[11]的发展也十分迅速,常用的有WIFI室内定位、蓝牙室内定位、UWB室内定位和RFID室内定位等。目前室内定位方法可以分为基于测距定位方法和基于非测距定位方法。基于测距定位方法分为到达时间法TOA、到达时间差法TDOA、到达角度差法AOA和基于RSSI测距定位法;基于非测距定位的方法是指纹定位法。近年来多种定位技术组合成为了室内定位技术的发展趋势,如将PDR定位信息、惯性传感器定位信息、基站定位信息和道路信息进行融合,在保证定位精度的基础上,减少了系统成本,提高了稳定性。
2.4室内外场景识别
当前比较主流的室内外场景识别技术主要有基于硬件设备部署的场景识别技术、基于环境感知的场景识别技术、基于图像处理和模式识别的室内外场景分类[12],由于普适性问题,目前大多数研究还是采用基于环境感知的室内外场景识别,室内外场景识别取决于室内外各种特征的识别,室内外特征选择的优劣直接会影响到场景识别的准确性。基于环境感知的场景识别就是利用移动终端,对光照、气压、地磁、卫星数目等进行检测,对检测信息设定一个固定阈值,作为室内外场景识别的判定依据,一旦超过这个阈值,就及时地切换定位技术[13]。
2.5无缝定位方案
2.5.1定位切换
无缝定位切换的关键是如何正确区分定位对象所处的区域是室内还是室外,尤其是在室内外交界区域实现低延时、高准确度的切换[14]。在定位过程中,随着定位对象的移动,定位模式不断发生改变,定位精度和定位结果受到很大影响,因此要对定位模式进行切换。切换是根据设定的切换条件切换室内或室外定位,只输出室外或室内一个定位结果。
确定好所处场景后,可以进行定位的切换,定位技术的切换过程包括以下三个步骤:
(1)切换触发:室内外定位重叠区域,根据信号强度、信噪比等参数信息,与切换门限比较,确定当前所用定位技术是否可用,是否需要切换。
(2)切换决策:这是最重要的环节,基于设定的切换算法,评估当前定位技术的性能,决定是否切换。
(3)切换执行:即执行由室内定位切换至室外定位或室外定位切换至室内定位的过程。
现有的切换算法主要有基于RSS的垂直切换算法、基于代价函数的切换算法、基于模糊逻辑的切换算法等。
由于需要对定位技术进行切换,会导致乒乓效应(反复切换),造成运算量的浪费,尤其是在需要地图的场景下,严重影响用户使用,可以在算法上进行改进,更准确的进行切换决策。
2.5.2多源数据融合
数据融合也称之为信息融合,是指为了能够对目标身份或者状态进行全面精确的分析,因而从多个数据源处提取出某个目标事物的特征,并将获取到的数据信息进行处理和组合的过程。因为在实际应用过程中,通过传感器接收到的数据往往是不完整的,所以要对多源数据进行整合,相互弥补缺失的信息,完整地表达目标[15]。
当卫星定位与无线定位同时在工作时,不判断在室内或室外,通过融合算法将两者的定位结果融合,作为一个整体系统输出即可实现室内外无缝定位。室内外交界区域,同时存在的两种定位数据精度受到外界环境影响,定位精度会有所降低。目前大多数学者聚焦在提高融合定位的精度研究上,通过对多源信息融合以及融合算法的研究[16],有效提高了室内外无缝定位结果的可靠性和准确性。
多源数据融合[17]常用的算法有加权融合算法、基于贝叶斯估計的滤波融合算法、卡尔曼滤波法和交互式多模型融合算法等。根据两种定位采集到的信号数据进行融合,两种定位数据的融合提高了室内外交界区域的定位精度。同时,在室内外定位数据融合时,由于两种定位技术坐标系的不同,还要进行坐标系的转换。
2.6路径规划
路径规划[18]是根据所给定的地图模型和目标位置,确定地图位置和局部障碍物分布情况,提取出多条可行路径,规划出最优路径。路径规划是建立在地图数据的基础上的,在建好的室内模型中提取路网,利用算法规划出最优路径。
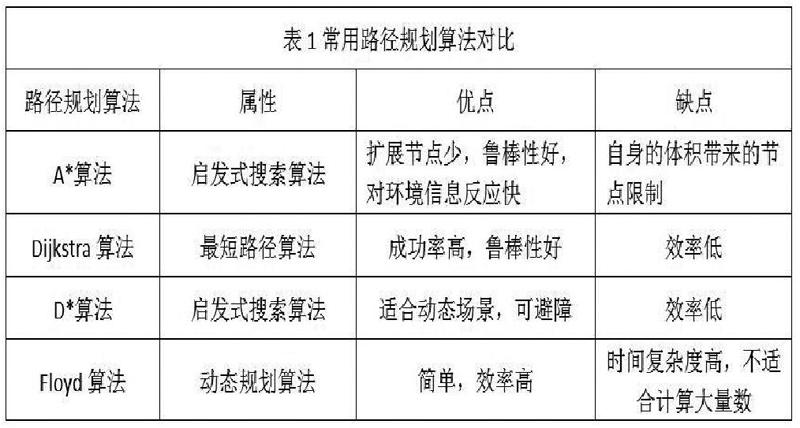
路径规划的核心就是算法的设计[19]。最常用的路径规划方法有A*算法,Dijkstra算法,D*和Floyd算法,常用路径规划算法对比见表1;在室内外融合模型中还可以利用Unity3D内置寻路算法在导航网格[20]中实现动态物体的自动寻路,该算法简单且功能强大。
启发式搜索是利用启发函数来对搜索进行指导,从而实现高效的搜索,启发式搜索方向的正反多与是否能处理动态规划有关,启发式搜索可以提高搜索的效率,避免全局盲目搜寻。以上算法各有优缺点,相互并不矛盾冲突,对于最优最短路径的使用判别,常常需要算法的改进或者多种算法的融合才能更高效解决实际问题。
3.室内外一体化导航存在的问题
虽然现在对一体化导航的研究众多,但仍有一些问题需要完善。
(1)全自动化。在室内外场景交界的地方,识别到的信息不够清晰,定位技术自动切换的功能还有待提高。
(2)使用范围局限。在融合模型中导航目前的使用范围比较局限,因为在模型的建立时需要耗费大量精力,成本也相对较高,应用目前还得不到普及,大多数研究做的一般是一个整体区域模型的导航,例如校园、商场、医院等。
(3)实时化问题。针对模型的建立,建好的模型不可避免的会在某些地方发生改变,可能是位置或者名称等等,这就要求模型能够根据现实场景实时化更新。
(4)定位精度低。单一的定位技术在室内定位时,可能会因为行人、物体等遮挡或者电磁干扰造成低精度的定位,可以通过多种定位融合来提高定位的精度。
不管是定位技术、算法,还是其他等等,单一的技术很难达到应用期望值,而通过多种技术的融合可以解决精度、成本等问题。
4.结语
室内外一体化导航还没有在现实生活中普及,但研究还在不断推进。本文总结目前室内外一体化导航研究最多的两种方案,介绍了两种方案的技术路线,并对两种方案中的一些关键技术作了介绍,最后分析了室内外一体化存在的一些难点。未来,实现全自动化、高精度、低成本的室内外一体化也是一大难关[21]。多源数据的融合、技术的融合以及算法的融合等有望加快这一发展,促进形成一套完善的室内外一体化导航体系。
参考文献:
[1]李冀,肖岩,马琳琳,等.室内外无缝定位方案研究[J]无线互联科技,2019,16(14):159-160
[2]孙瑞祺,连懿,王子悦,等.大型建筑物室内外三维模型构建[J]无线互联科技,2018,15(11):100-103
[3]高业何敏,郑加柱,宋玉兵.室内定位技术研究综述:2017年度江苏省测绘地理信息学会GPS、大地专业委员会学术年会暨JSCORS技术交流大会[C]中国江苏南京,2017
[4]张广林,胡小梅,柴剑飞,等.路径规划算法及其应用综述[J]现代机械,2011(05): 85-90
[5]朱泽洲,熊汉江,戴雪峰.顾及语义的室内三维模型数据组织与可视化[J]测绘与空间地理信息,2015,38(04): 41-43
[6]罗鑫,张作淳,王志彪,等.基于无人机倾斜摄影的校园三维建模[J]科学技术创新,2021(03):80-81
[7]徐敬海,卜兰,杜东升,等.建筑物BIM与实景三维模型融合方法研究[J]建筑结构学报:1-11
[8]郑月,陈吉,孙韬,等.基于无人机倾斜影像的模型重建单体化及精度研究[J]中阿科技论坛(中英文),2020(10):83-85
[9]舒菁英.基于BIM-GIS技术融合的智慧校园建设[J]现代企业,2021(04):143-144
[10]庄春华,赵治华,张益青,等.卫星导航定位技术综述[J]导航定位学报,2014,2(01):34-40
[11]孙大洋,章荣炜,李赞.室内定位技术综述[J]无人系统技术,2020,3(03):32-46
[12]苏帅.基于多模态融合的高精度室内外场景识别技術研究[D]北京邮电大学,2015
[13]毕京学,汪云甲,甄杰.一种基于手机端的室内外场景识别方法及其初步实验[J]地理与地理信息科学,2017,33(03):48-51
[14]魏彬彬.异构无线网络垂直切换算法研究[D]燕山大学,2019
[15]崔佳.基于领域本体的多元异构数据融合关键技术研究[D]中国石油大学(华东), 2018
[16] CANTARERO NAVARRO R, RUBIO RUIZ A, DORADO CHAPARRO J, et al. A Proposal for Modeling Indoor-Outdoor Spaces through IndoorGML, Open Location Code and OpenStreetMap[J]ISPRS INTERNATIONAL JOURNAL OF GEO-INFORMATION, 2020,9(1693).
[17]匡兵,陈凤冉,田春月,等.基于改进粒子滤波的超宽带与惯性测量单元融合定位算法[J]科学技术与工程,2020,20(30): 12460-12466
[18]危双丰,胡博,张晓钰,等.数字校园室内外一体化三维导航路径规划[J]测绘通报,2018(10):46-50
[19]熊维茜,高平,呙维,等.面向多层建筑的室内外一体化路径规划算法[J]测绘地理信息,2020,45(01):44-46
[20]刘武平,熊维茜.一种基于多层导航网格的室内路径规划算法[J]测绘地理信息,2020,45(06):18-21
[21]韩伟,杨佳,周长军.基于地图建模的室内外无缝导航定位系统的设计[J]电子设计工程,2015,23(08):165-167
猜你喜欢
小天使·三年级语数英综合(2022年4期)2022-04-28
杂文选刊(2018年1期)2018-01-09
汽车导报(2017年5期)2017-08-03
中学生数理化·高一版(2017年1期)2017-04-25
求学·理科版(2017年1期)2017-03-02
中国新技术新产品(2017年2期)2017-01-20
科技创新与品牌(2016年11期)2017-01-09
中国新技术新产品(2016年23期)2016-12-26
中学生数理化·高二版(2016年4期)2016-05-14
科技视界(2016年4期)2016-02-22
