
矿井带式输送机故障及其智能控制策略分析
2021-09-21 11:59:18臧旭辉
机械管理开发 2021年8期
臧旭辉
(山西焦煤霍州煤电集团河津杜家沟煤业有限公司,山西 河津 043300)
引言
某煤矿第15 号煤层处在太原组最底部,同时也在K2 灰岩下面,煤层厚度在1.64~7.20 m 之间,平均厚度大约在3.86 m。作为全煤巷道,运输大巷是以15 号煤层为基础而掘进创建的,因为使用周期长、煤层裂纹大,所以很容易引起巷道底板发生变形。同时煤层巷道所使用的带式运输机也是以巷道底板为基础进行布置的。伴随煤矿开采量的不断扩大,煤矿运输系统的工作强度也在不断加大。带式运输机在粉尘浓度、空气湿度以及巷道变形等多种因素共同影响下,很容易出现撒料、跑偏以及停机维修等故障,使得煤矿开采效率大幅降低。因此,要对带式运输机的故障原因以及类型进行深入分析,同时还要通过智能化手段提出有效解决方案,从而保证煤矿掘采效率的提高。
1 主要故障类型分析
1.1 带式输送机结构及原理
如图1 所示,作为15 号煤层大巷主要运输设备带式运输机由驱动运行装置、尾架拉紧装置、改向滚筒组、缓冲托辊组、传送运输带、煤矿清扫器、操作保护装置七部分共同组成[1]。
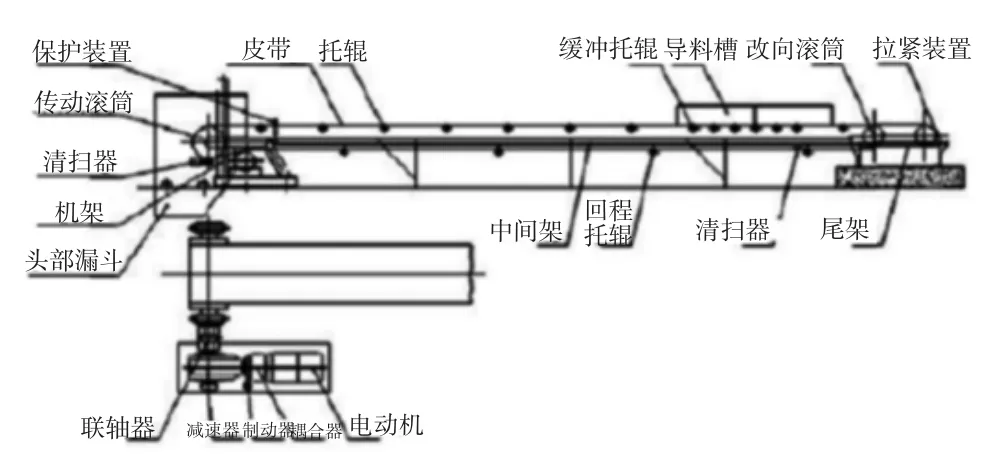
图1 带式运输机机构示意图
驱动运行装置为带式运输机提供动力,滚筒传递动力,皮带在摩擦力驱动下围绕托辊、滚轮旋转,经过拉紧装置作用皮带张紧,因为缓冲托辊的支撑使得皮带保持在U 形状态。在皮带作用下煤炭随其向前运动到达运输终点。带式运输机承载力主要来源于机架,而带式运输机机架优势沿着大巷底板进行铺设,但是运输机的平行运转却不受大巷底板变形影响。
1.2 故障类型
该矿经过6 个月监测统计发现,带式运输机运行故障主要有撒料、皮带跑偏等6 种,其故障占比如图2 所示。其中,63.5%的故障率都是源自撒料以及皮带跑偏,对煤炭运输效率产生重大影响。
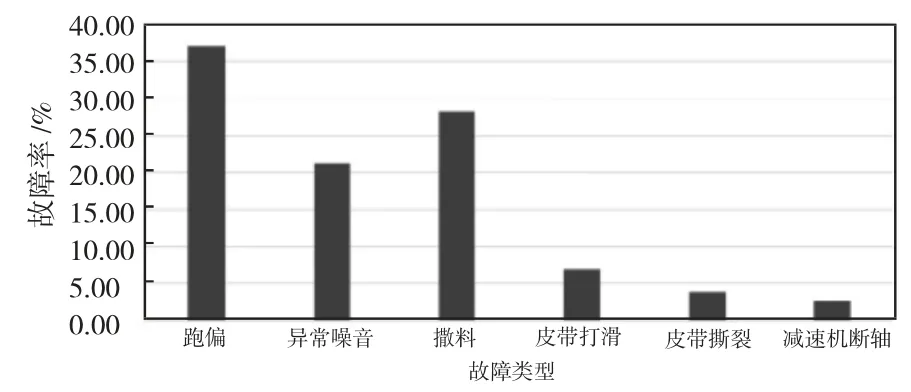
图2 带式输送机故障率发生对比图
1)故障率排在第一的是皮带跑偏,所占比例37%。运输机正常工作状态下,因为托辊的支撑作用皮带呈现U 形带动货物运行,通常情况就是皮带以非U 形状态远离托辊支撑运行而导致故障,从而引起皮带磨损、撒料等问题,甚至情况严重者出现安全事故。
2)故障率排在第二的是撒料,所占比例28.3%。造成运输机撒料的主要原因有皮带跑偏远离支撑而使物料撒落,以及大巷底板自身变形较大导致运输机皮带松紧形成悬空从而造成撒料。
3)故障率排在第三的是异常噪音,所占比例21.2%。因为带式运输长期处于粉尘环境中,所以很容易导致运转轴承损坏。且部件数量众多,所以很容易有异常噪音产生。虽然这类故障不会对运输效率产生较大影响,但是这类问题出现时往往也就意味着运输机需要维护保养了。
4)故障率排在第四的是皮带打滑,所占比例6.9%。因为滚筒与皮带之间摩擦方式发生变化从而导致皮带打滑。其主要原因分为如下两种:第一种是皮带张紧装置提供的张紧力太小;第二种是皮带与滚筒之间进入湿润物料[2-3]。
5)故障率排在第五的是皮带断裂,所占比例3.9%。这种故障虽然发生概率很小,但是造成危害却极大,一旦发生整个运输系统必须停止运转,其主要发生在皮带和滚筒接口处。造成这种情况的主要原因就是转载破损以及皮带老化等。
6)故障率排在第六的是减速机断轴,所占比例2.7%。其主要发生位子在减速机高速轴位上,产生这种情况的主要原因就是部件设计强度不足,在加上高强度疲劳损坏,很容易引起转轴断裂。
2 故障预防控制研究
2.1 解决方案
按照故障类型进行传感器引入,通过传感器对故障数据进行监测。所图3 所示,智能控制系统自行对数据进行判断,根据判断结果发送指令,从而确保智能控制的有效实现。

图3 带式输送机智能控制系统架构
1)皮带跑偏。以左右交替方式,每50 m 间距在皮带两侧布置1 个距离传感器,借助极限值设置法来解决皮带跑偏问题,当皮带跑偏距离相对较小时可以发送提醒警告以便人工查验,当皮带跑偏距离相对较大时可以直接使运输系统停止运行。
2)撒料。皮带下面每间隔5 m 安装一个称重传感器,把第一个传感器数据作为初始值,然后和其他传感器获取的数据进行对比分析,如果数据差异相对较大,那么控制主机就会发送警报,从而提醒工作人员对运输机进行检修维护。
3)皮带打滑。皮带转动主要是滚筒静摩擦力带动的,如果皮带出现打滑那么很容易造成静摩擦牵引力减小。所以需要在滚筒和皮带交接处安装速度传感器,以此获取皮带运行数据,从而判断皮带打滑情况。
4)因为减速机断轴、皮带撕裂这两种情况发生概率很小,并且运输机设备自身能够对运行状态进行判断,所以不需要在增加其他智能判断模块。
2.2 智能控制系统设计
智能控制系统主要由集中控制系统和传感器检测系统组成。集中控制系统作为智能控制系统的重要组成部分,其主要作就是数据分析、指令发送;传感器检测系统主要作用就是接受采集传感器监测数据。
智能控制系统设计过程中必须要确保监测数据的可靠性和及时性,首先系统配件自身的可靠性和稳定性要有保证,只有如此才能保证整个控制系统具有良好的性能。15 号煤层运输大巷工作环境状况极为恶劣,所以优先选用高性能57-1214PLC型西门子主控制器。此系统硬件设计模块主要有PLC 控制系统、功率监测系统、传感器系统、变频器系统组成[4]。智能控制系统各个模块流程图如图4 所示。作为智能控制系统的重要组成部分PLC 控制系统主要作用就是接受控制命令以及控制命令输出,从而保证对电动机的有效控制;传感器系统主要作用就是对运输机运行速率、运输量进行监测,并将监测数据及时反馈给PLC 控制器;功率监测系统主要作用就是对变频器以及电动机运行功率数据进行采集,并将采集数据及时反馈给PLC 控制器;传感器系统只要作用就是对带式运输机运行故障状态进行监测,并将监测数据及时反馈给PLC 控制器。所有监测数据经过PLC 控制器初步处理后反馈给上位机系统,煤矿开采人员可通过上位机系统对运输机进行实时监控。

图4 带式输送机智能控制系统组成
3 结语
通过分析监测数据,对带式运输机的故障类型、特点以及故障解决方法都有一个全面了解。通过引入智能控制系统,不仅让带式运输机故障智能预警得到有效实现,而且还让运输机故障率得到大幅降低。与此同时,还要加大生产监管力度以及强化工作人员技能操作,尽而确保煤矿运输设备故障发生率的有效降低。
猜你喜欢
黑龙江科学(2020年20期)2020-10-17 05:39:56
军事文摘(2020年15期)2020-08-15 08:40:02
经济技术协作信息(2018年28期)2018-11-22 05:27:06
小学生学习指导(小军迷联盟)(2018年10期)2018-10-12 01:13:40
机械管理开发(2018年9期)2018-09-18 05:29:38
中国交通信息化(2017年4期)2017-06-06 07:22:01
电测与仪表(2016年20期)2016-04-11 11:39:22
机电信息(2015年3期)2015-02-27 15:54:43
中国煤炭(2014年3期)2014-04-20 01:43:44
河南科技(2014年24期)2014-02-27 14:19:38
