三峡船闸双边人字闸门随动控制仿真研究
2021-09-18 11:58陈坤高术陈学文
人民长江 2021年8期
陈坤 高术 陈学文
摘要: 为提高船闸人字闸门运行效率,以三峡船闸双边人字闸门液压起闭控制系统为对象,以三环PID控制系统设计为基础,采用双比例泵/电机组交叉耦合补偿的原理与方法搭建了人字闸门三环PID随动控制系统仿真模型。通过MATLAB/Simulink软件仿真与船闸实际PLC控制系统运行曲线的对比,发现双边人字闸门随动控制仿真系统关门历时2.1 min,开门历时2.2 min,原PLC随动控制系统关门历时5.2 min,开门历时3.1 min,该仿真系统能大大提升系统响应的快速性,且不影响系统的稳定性和准确性。研究成果对于船闸双边人字闸门随动控制系统的技术改进和三峡新通道船闸控制系统建设具有借鉴意义。
关 键 词: 人字闸门; 随动控制; 交叉耦合补偿; 三环PID控制; 仿真模型; 三峡船闸
中图法分类号: U641.7+2
文献标志码: A
DOI: 10.16232/j.cnki.1001-4179.2021.08.036
0 引 言
三峡船闸是目前世界上规模最大、总设计水头最高的双线五级船闸,其双边人字闸门控制系统是一个复杂的机-电-液系统[1]。由于工况特殊,船闸运行负荷重,运行安全责任大,这就要求人字闸门控制系统必须具备较快的运转速度、较高的运转精度和平稳的运转性能[2]。
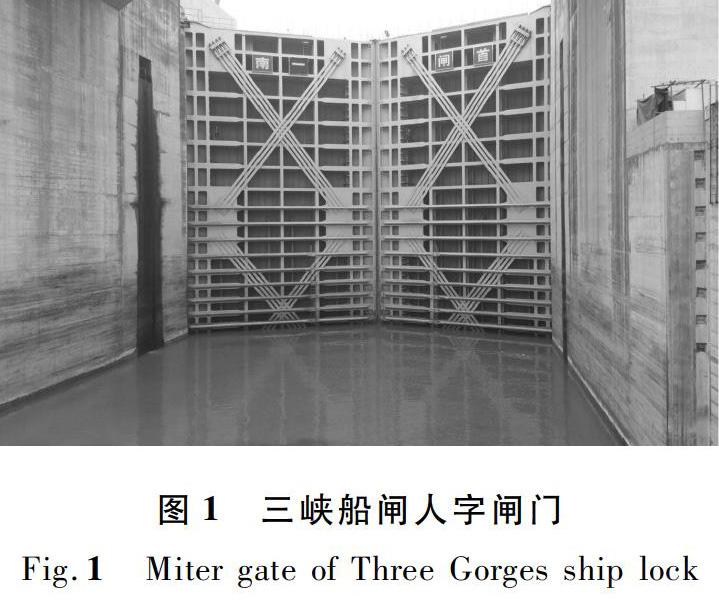
三峡船闸现有的人字闸门(见图1)控制系统采用基于PLC的分7段给定比例泵/电机组电压值-液压起闭传动-闸门行程负反馈调整给定电压值的控制策略,实现双边人字闸门的协调同步运行[3]。这种控制策略能较好地保证闸门开关门过程中的稳定性和合拢对中的准确性,但由于其给定电压采用7级变速经验值给定,闸门运行快速性还有进一步提升的空间。
因此,利用计算机模拟仿真的方法,建立准确度高的随动系统模型[4],采用先进的控制方法和算法来实现船闸机-电-液控制系统仿真设计研究[5],对改进和优化三峡船闸现有的人字闸门控制系统设计、提升三峡船闸运行效率、进一步为新通道船闸建设提供技术支撑等具有重要的现实意义。
1 人字闸门随动控制系统设计
三峡船闸人字闸门需要实现两扇闸门随动启闭功能,开关门过程中要求运行快速、平稳、随动性好、关终门体错位和门缝较小。本文以三峡船闸双边人字闸门门体为研究对象,以三环PID控制随动系统设计为基础,对其随动控制系统进行MATLAB/Simulink仿真研究。双边人字闸门门体驱动系统为双比例泵/电机组驱动系统,传动系统采用液压起闭油缸,以增强系统对复杂工况和大、变负载的适应性能。
1.1 人字闸门三环PID控制系统设计
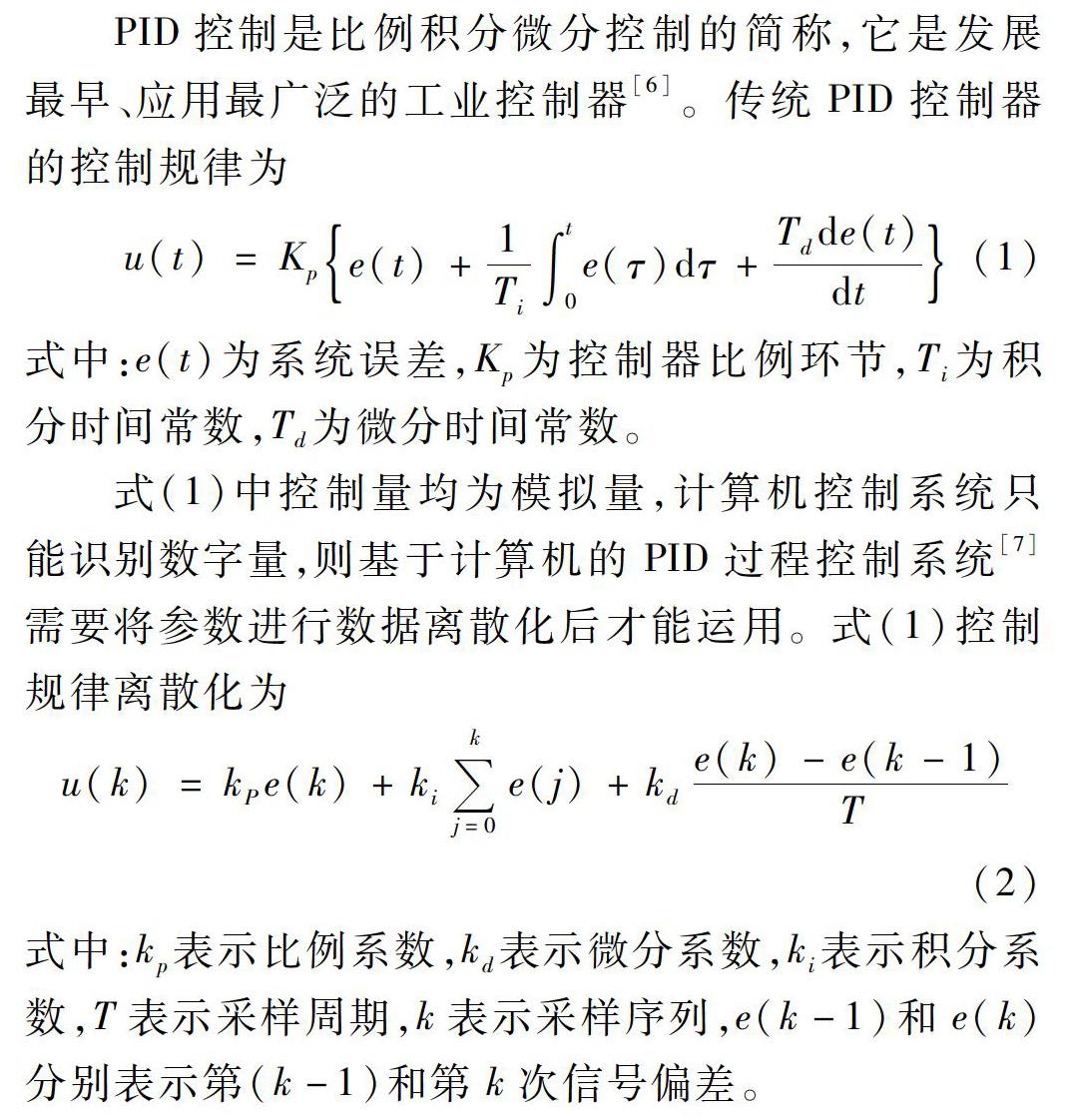
PID控制是比例积分微分控制的简称,它是发展最早、应用最广泛的工业控制器[6]。传统PID控制器的控制规律为
u(t)=Kp e(t)+ 1 Ti ∫t0e(τ)dτ+ Tdde(t) dt (1)
式中:e(t)为系统误差,Kp为控制器比例环节,Ti为积分时间常数,Td为微分时间常数。
式(1)中控制量均为模拟量,计算机控制系统只能识别数字量,则基于计算机的PID过程控制系统[7]需要将参数进行数据离散化后才能运用。式(1)控制规律离散化为
u(k)=kPe(k)+ki k j=0 e(j)+kd e(k)-e(k-1) T (2)
式中:kp表示比例系数,kd表示微分系数,ki表示积分系数,T表示采样周期,k表示采样序列,e(k-1)和e(k)分别表示第(k-1)和第k次信号偏差。
在PID控制中,稳、准、快三特性往往不能同时达到最优,只能取一个平衡值,在保障系统功能、性能的前提下同时兼顾系统稳定性、准确性和快速性[8]。
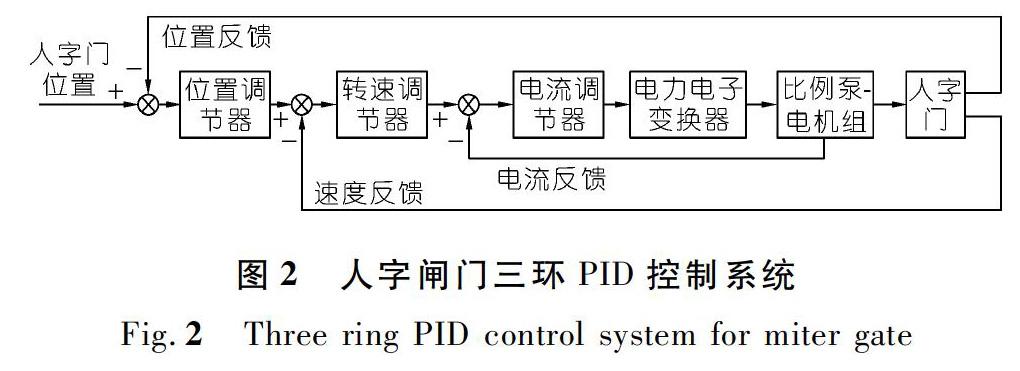
本文介绍的人字闸门三闭环位置随动控制系统如图2所示。整个控制系统从内而外分为电流环控制、速度环控制和位移环控制,把人字闸门位置和人字闸门开度仪的差值经过位置控制器输出,作为电机组转速给定的依据;转速给定值和人字闸门实际转速值的差值经过速度控制器后输出,作为电流控制的给定依据;电流控制可以快速地实现电流的输入/输出需求。电流给定经过脉宽调制轉换后可得到电压控制信号,电压信号决定电机组的转矩或转速,并通过液压油缸传动系统驱动人字闸门转动,达到人字闸门随动装置位置随动控制的目的。
由于船闸人字闸门工况复杂、负载较大,双侧人字闸门采用双比例泵/电机组驱动,每台比例泵/电机组由2台电机组成,在双边人字闸门开关门运行过程中,两侧比例泵/电机组存在严重的电机匹配耦合问题。目前三峡船闸双边人字闸门采用分7段给定比例泵/电机组给定电压并随动判断的方式控制,比例泵给定电压依靠人为经验给定,无法保证闸门启动、高速运行及开关终过程各个阶段快速性、准确性、稳定性的协调最优问题,往往为了保障船闸运行过程中的准确性和稳定性而牺牲快速性要求。因此,研究并提升船闸双边人字闸门运动过程中的快速性、准确性、稳定性协调运行显得尤为重要。
双比例泵/电机组交叉耦合补偿控制是一种差速负反馈补偿控制[9],是以中隔墩侧比例泵/电机组1为主电机组,南侧或北侧比例泵/电机组2为跟随电机组。将电机组理想转速与实际转速的差值,通过电流控制放大器放大,并通过液压传动系统实现船闸双边人字闸门门体的同步运行。再将双边人字闸门转速求差后通过一个权值系数反馈补偿至各电机组,从而实现跟随电机组与主电机组的随动驱动,双比例泵/电机组交叉耦合补偿原理如图3所示。
2 随动控制系统仿真
2.1 人字闸门随动控制系统仿真设计
根据图2所建立的人字闸门三环PID随动控制系统和图3所建立的双比例泵/电机组交叉耦合补偿控制模型,建立三峡船闸双边人字闸门双比例泵/电机组驱动模式的三环位置随动控制系统仿真系统[10],如图4所示。
以三峡船闸南线一闸首为仿真对象,人字闸门随动控制系统的输入量为人字闸门开关门行程,双侧比例泵/电机组驱动系统采用了交叉耦合补偿控制,系统的负载转矩由实际运行过程中人字闸门油缸有杆腔/无杆腔油压换算给定。
2.2 仿真运行曲线与实际运行曲线
将以上建立的人字闸门随动控制仿真系统,分开门和关门状态进行仿真,并以人字闸门实际运行曲线作为对比,双边人字闸门实际运行曲线和仿真结果如图5~8所示。
2.3 仿真与实际运行结果分析
由图5~8可以看出:
船闸人字闸门原PLC控制系统中关门历时5.2 min,开门历时3.1 min,而在本文三环PID随动控制仿真系统中,人字闸门关门历时2.1 min,关门速度提升了69.6%,开门历时2.2 min,开门速度提升了29.0%,仿真系统大大提升了控制系统的响应速度。仿真系统与原PLC控制系统稳定性和精度无明显差异,均运行平稳且偏差在15 mm以内,满足船闸运行要求。
仿真控制系统与实际PLC控制系统相比,比例泵/电机组参数由控制系统自动判断给定,替代人为经验给定,提升了系统的自适应性能和操作简便性,降低了运行管理人员人为设置参数过程中误操作对设备运行带来的安全隐患。
3 结 语
本文建立了人字闸门三环PID随动控制系统,并应用MATLAB/Simulink控制系统仿真软件搭建了人字闸门双比例泵/电机组交叉耦合补偿控制系统仿真模型。
通过软件仿真曲线与实际运行曲线对比分析,验证了所建随动控制系统仿真模型和控制方法的正确性和有效性。
通过仿真和实际运行对比研究,发现采用三环PID随动控制系统能大大提升系统响应的快速性,且不影响系统的稳定性和准确性。研究结果对于船闸人字闸门随动控制系统研究改进和新通道船闸控制系统建设具有借鉴意义。
参考文献:
[1] 钮新强,童迪.三峡船闸关键技术研究[J].水力发电学报,2009,28(6):36-42.
[2] 陈晓关.提高三峡船闸通航能力的研究[D].武汉:武汉理工大学,2006.
[3] 陈坤,王东.液压技术在三峡船闸的应用[J].流体传动与控制,2007(6):42-44.
[4] 于春梅,易奎,侯惠让,等.基于虚拟样机技术的控制系统实验平台开发[J].实验技术与管理,2014,31(2):82-84.
[5] 李晓莲.基于ADAMS和MATLAB的汽车主动悬架联合仿真研究[D].长春:吉林大学,2009.
[6] 唐普霞.永磁随動电动机调速控制系统的设计和研究[D].合肥:合肥工业大学,2009.
[7] 沈亮,刘刚,叶柳军.PID在液压升降平台同步控制中的应用[J].液压气动与密封,2017(11):66-68.
[8] 于洋,王子帅,杨青.改进PSO-PID算法在温度控制中的快速性研究[J].工业仪表与自动化装置,2013(2):9-11.
[9] ZHENG E L,ZHOU X L.Modeling and simulation of flexible slider-crank mechanism with clearance for a closed high speed press system[J].Mechanism and Machine Theory,2014,26(74):10-3.
[10] 高术.基于虚拟样机技术的多驱动装置自适应控制方法研究[D].宜昌:三峡大学,2015.
(编辑:胡旭东)
引用本文:
陈坤,高术,陈学文.三峡船闸双边人字闸门随动控制仿真研究
[J].人民长江,2021,52(8):235-238.
Simulation study on follow-up control of double miter gate of Three Gorges ship lock
CHEN Kun,GAO Shu,CHEN Xuewen
( Three Gorges Navigation Authority,Yichang 443000,China )
Abstract:
In order to improve the operation efficiency of miter gates,taking the hydraulic control system of Three Gorges ship locks gate as the research object,based on the design of three-loop PID control system,the simulation model of three-loop PID servo control system for the miter gate was built by using the principle of cross coupling compensation of double proportional pump/electric unit.By comparing the simulation results of MATLAB / Simulink software with the operation curve of the actual PLC control system of the ship lock,it was found that the closing time of the bilateral miter gate by servo control simulation system was 2.1 min,and the opening time was 2.2 min,while the closing time under original PLC servo control system was 5.2 min,and the opening time was 3.1 min.This simulation system can greatly improve the rapidity of system response without affecting the stability and accuracy of the system.The research results can be used for reference for the technical improvement of the servo control system of the double miter gate and the construction of the new channel lock control system of the Three Gorges Project.
Key words:
miter gate;follow-up control;cross coupling compensation;three-loop PID control;simulation model;Three Gorges ship lock
猜你喜欢
青年文学家(2022年7期)2022-04-24
中老年健康(2017年7期)2017-12-15
新课程研究·教师教育(2017年9期)2017-11-15
中国绿色画报(2017年8期)2017-09-01
中学生博览(2017年11期)2017-06-27
中学生博览·文艺憩(2017年6期)2017-06-19
企业文明(2017年5期)2017-05-31
新高考·高一数学(2016年3期)2016-05-19
读写算·小学低年级(2015年8期)2015-08-19
少年科学(2007年12期)2007-02-27