基于H-ADCP的河道断面多层流速测量与流量计算
2021-09-18 10:48张国学史东华冯能操
人民长江 2021年8期
张国学 史东华 冯能操
摘要: 河道断面流量准确、高效监测一直是水文在线监测的重点,为解决因断面流速分布数据收集难度大,指标流速公式建模困难,现有在线测流技术普遍存在流量计算误差偏大的问题,提出了一种基于H-ADCP河道断面多层流速测量方法,并结合部分流量累加法给出了测量区和盲区的流量计算公式,以及基于此法的在线测流系统技术实现过程。以南水北调中线渠首陶岔水文站测验断面为例,将基于此法的流量计算成果和走航式ADCP实测流量成果进行了误差分析。结果表明:此法构建的在线流量监测系统有较高的测量精度,时效性好,对H-ADCP流量在线监测应用推广有较好的借鉴意义。
关 键 词: H-ADCP; 多层流速测量; 断面流量计算; 陶岔水文站; 南水北调中线工程
中图法分类号: P332.4
文献标志码: A
DOI: 10.16232/j.cnki.1001-4179.2021.08.012
0 引 言
流量在线监测是水文现代化发展趋势[1-2],当前大多数在线监测方法是基于指标流速法来监测的,即通过收集大量断面流速分布资料,建立断面平均流速与实时施测的特定点、特定水层、特定垂线的流速的函数关系式来推算断面流量,实现流量在线监测[3]。此方法假定实测代表流速与断面平均流速有稳定明确的函数关系,在函数构建过程中有两个难点,一是代表流速选择较为困难;二是代表流速与断面平均流速之间的函数关系式构建较为困难,最终导致算出的在线流量与流速仪法测量结果相比有较大误差。因此,流量在线监测系统投入运行前,需要开展大量的比测试验,对函数关系式进行修订、验证[4-5]。另外河床冲淤变化也会引起断面水流特性发生变化,进而导致代表流速与断面平均流速之间的函数关系式不稳定[6]。
本文提出了一种H-ADCP的河道断面多层流速测量方法和断面流量计算方法,对断面部分流量权重大的区域进行实测,对测量盲区部分进行合理估计,规避了指标流速法函数关系建立困难的问题,提高了测验精度,同时本文还介绍了基于此方法的在线测流系统技术实现。
1 H-ADCP河道断面流速流量测算原理简介
本文引入H-ADCP河道断面多层流速测量及断面流量计算系统,基于部分流量累加法实现流量在线监测。此法通过把过水断面划分成若干个测量单元,分别测量各个单元面积Ai和单元平均流速Vi,其中i表示单元序号,断面流量Q可表示为
Q= n i=1 AiVi (1)
式中:n表示单元总个数。
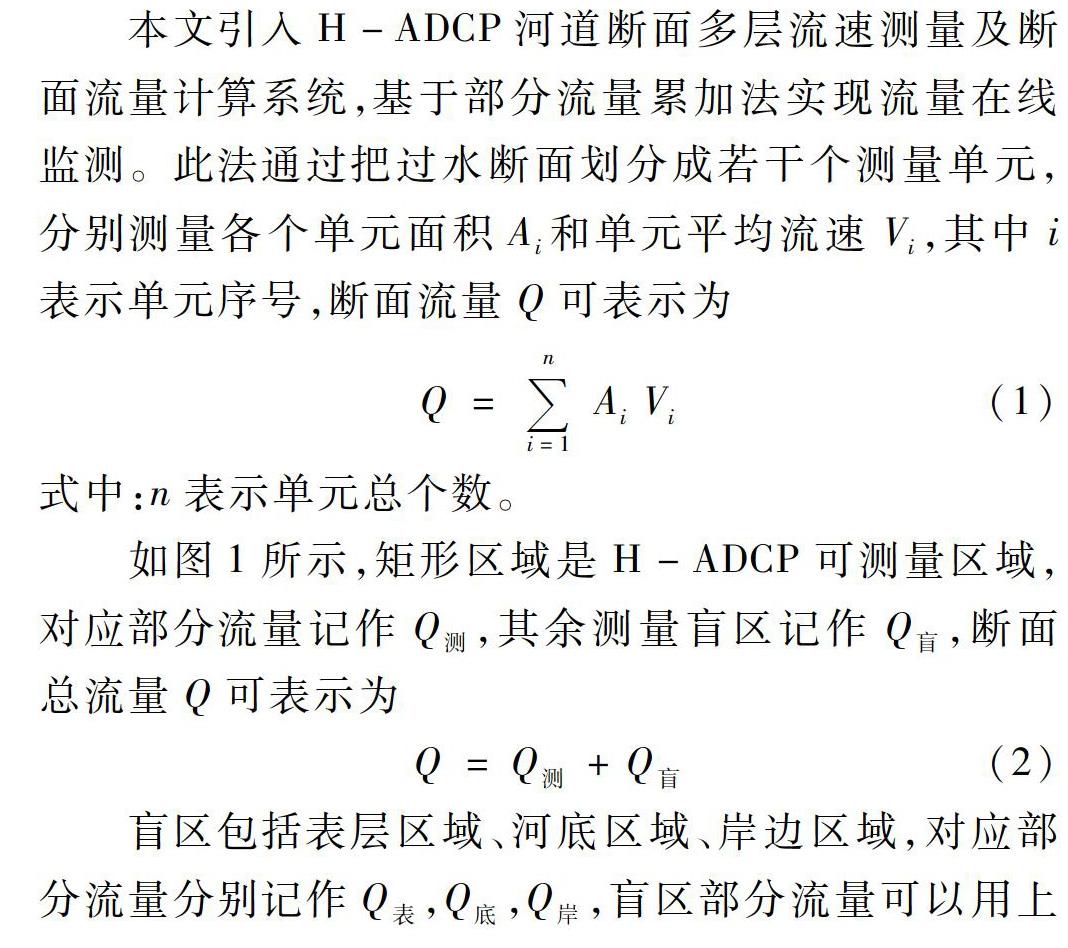
如图1所示,矩形区域是H-ADCP可测量区域,对应部分流量记作Q测,其余测量盲区记作Q盲,断面总流量Q可表示为
Q=Q测+Q盲 (2)
盲区包括表层区域、河底区域、岸边区域,对应部分流量分别记作Q表,Q底,Q岸,盲区部分流量可以用上述流量之和表示,即:
Q盲= Q表+Q底+Q岸 (3)
1.1 实测区部分流量测算
单元格流速用H-ADCP实测获取。如图1实测区流量单元格为矩形,单元格的宽度B在H-ADCP中设定,单元格的高度H取决于H-ADCP分层测量时的层间距。
每个流速单元序号记作A(i,j),其中i表示水平测流线序号,最上层水平线记作1号线,往下依次递增;j表示单元格垂向分割线序号,大断面起点位置记作第1条垂线,向河对岸依次递增。流速单元格A(i,j)为i号水平线与j 号垂线交点右下方的单元格。测量前单元格宽度已经预先设置,H-ADCP在大断面上具有确定的位置坐标,因此测得到的各点流速在大断面上有确定的位置坐标。以A(i,j)号单元格为例,其上边线上有实测流速点v(i,j),下边线上有实测流速v(i+1,j)。可以用上下边线上的流速平均值作为单元格流速。
那么单元格A(i,j)部分的流量:Q(i,j)=BH[v(i,j),+v(i+1,j)]/2;
实测单元格总流量为
Q测= m-1,n i=1,j=1 Q(i,j) (4)
式中:m表示流速测量总层数,n表示每层流速单元格的数量。
1.2 测量盲区部分流量测算
从图1可以看出,岸边以及河底部分并不是规则的矩形单元格,表层单元格高度小于划定的单元格,这些单元格实测流速点有限,有的甚至没有实测流速,不能直接用上述方法进行部分流量计算,这些测量盲区的流量通过合理估算得到。以表层部分流量为例进行说明,岸边及河底估算方法类似。
1.2.1 表层部分流量计算
表层与H-ADCP实测的最上层距离最近,其平均流速与该实测层耦合关系最密切,可以建立表层部分平均流速V表与H-ADCP实测最上层平均流速V1的线性关系式。
V表=α表V1 (5)
式中:α表表示表层部分平均流速与H-ADCP实测最上层平均流速的线性换算系数;
V1通过H-ADCP实测的最上层各点流速取平均获得,即V1= n j=1 v(1,j)/n;
表层部分面积A表可以根据断面水位z、H-ADCP测量最上层的高程h1以及大断面表计算获得,即A表(z,h1),表层部分流量计算公式如下:
Q表=α表A表(z,h1) n j=1 v(1,j)/n (6)
其他盲區流量计算方法同理。
1.2.2 盲区流速换算系数
流速换算系数通过走航式ADCP实测数据经过计算得到。以H-ADCP表层测量盲区为例,在表层盲区面积A表已知的情况下,先用走航式ADCP测量出表层盲区的流量Q表,表层盲区平均流速可表示为V表=Q表/A表,代入式(5)即可算出表层流速换算系数α表,其它盲区流速换算系数可以参照上述方法求得[7]。也可以从走航式ADCP测量数据中,摘录该盲区点流速数据,点个数3倍于H-ADCP测流单元格数,点均匀分布在盲区内。将这些测点流速进行算术平均,记作测量盲区的平均流速V表,代入式(5)也可算出表层流速换算系数α表,即
α表=V表/ V1 (7)
其他盲区流速换算系数计算方法同理。
1.2.3 盲区平均流速综合换算系数
分别计算各个盲区流速换算系数,可以提高在线流量计算的精度,但是增加了流量計算的工作量,也增加了相关软件开发难度。可以将各个盲区面积进行合并。设断面过水面积为A(z),H-ADCP可测面积为A测,盲区总面积A盲可表示为
A盲= A(z)-A测
设走航式ADCP测量的断面流量为Q走,且为断面流量真值,H-ADCP测量盲区流量Q盲可表示为
Q盲= Q走-Q测 (8)
盲区平均流速V盲可表示为
V盲= (Q走-Q测)/ (A(z)-A测) (9)
拾取H-ADCP实测流速单元周围各流速点,并求出这些点的流速算术平均值V周,盲区平均流速综合换算系数α可表示为
α= V盲/ V周 (10)
基于此法断面总流量Q可表示为
Q=Q测+αV周(A(z)-A测) (11)
2 在线流速测量系统技术实现
流速流量测算系统由断面多层流速采集子系统和断面流量计算子系统两部分组成[8]。其中断面多层流速采集子系统采集水位和断面各个点流速,并将各点位置坐标一并汇编成点流速报文,传递给断面流量计算子系统,计算子系统内置流量计算方法和河道断面信息,根据接收的流速和水位信息,计算出断面流量。
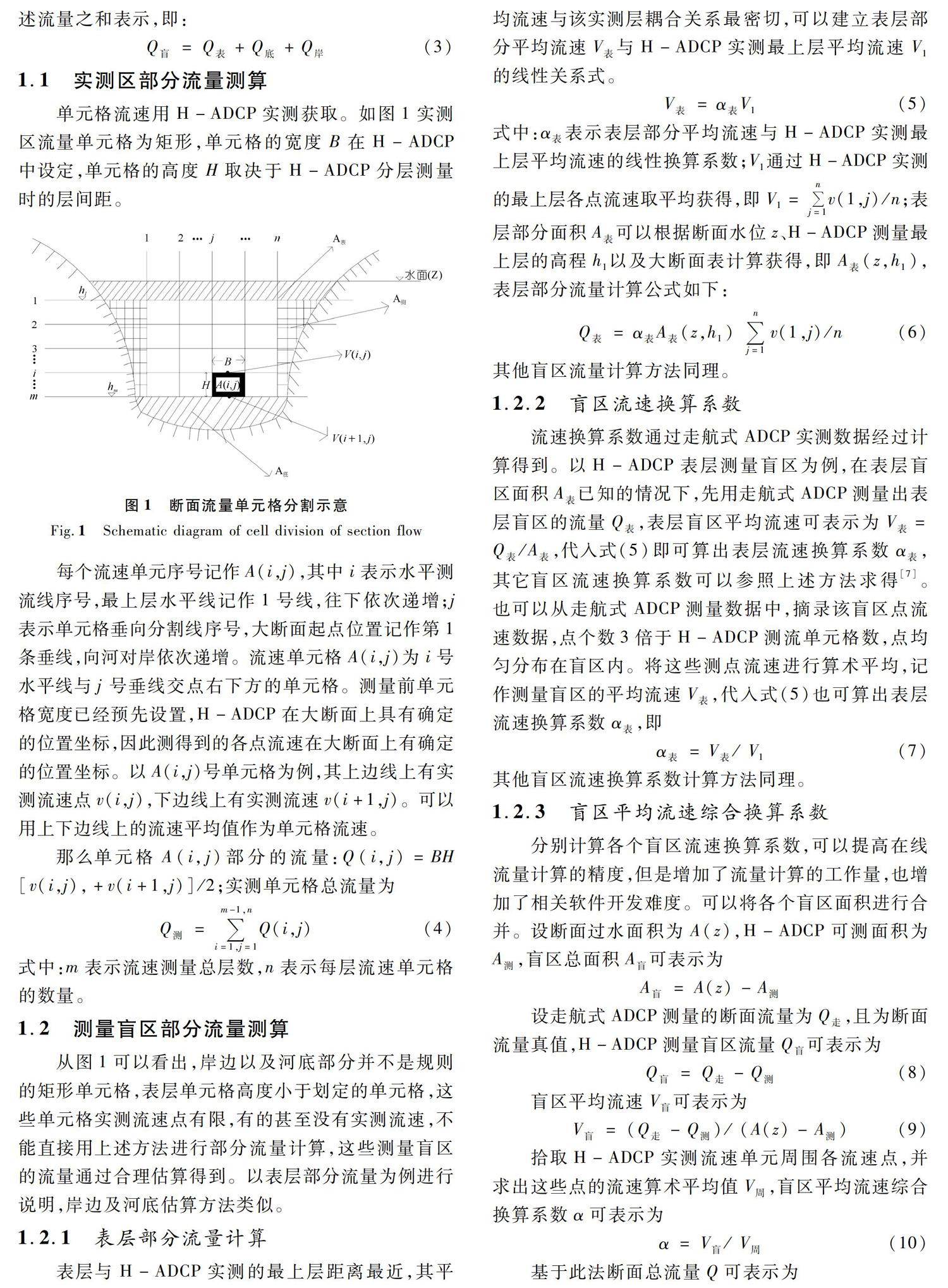
2.1 断面流速采集子系统结构
断面流速采集子系统结构如图2所示。该系统主要由数据采集器、水位计、位置传感器、H-ADCP、H-ADCP拖动设备等部件组成,各个部件作用如下。
数据采集器负责向水位计下发水位采集任务,收集水位数据,并根据水位情况向H-ADCP及其拖动系统布置测流任务,收集流速数据,最后将收集的水位、流速信息转发给流量计算子系统。为了便于系统集成,本系统选用的水位计、位置传感器、ADCP拖动系统的通信接口都为RS485总线接口,传感器挂载在数据采集器的RS485总线接口上组成测控系统。数据采集器内部集成4G通信模块,实现监测数据无线传输,以1帧或多帧的方式将断面不同单元的流速信息上传给流速计算系统。数据采集器也可以响应流速计算系统远程下达的测量任务,并做好工作分解。
水位计测量水位,以便计算断面过水面积,断面流速测量方案通常由水位的高低确定。视测流断面边坡情况确定水位计的类型,一般选择雷达水位计或者压力式水位计,以稳定可靠投资经济为基本原则。
位置传感器用于感知H-ADCP的位置,用于定位H-ADCP在大断面的坐标(P,h),P表示H-ADCP的起点距,h表示H-ADCP的高程,H-ADCP驻测当前层流速时,该层各点流速的高程坐标与H-ADCP的高程坐标相同,都为h。H-ADCP前方第一个流速点的坐标是((P+L+B),h),其中L表示H-ADCP前方盲区宽度,B表示单元格宽度,含义与第1节相同,同理H-ADCP前方第n个流速点的坐标是((P+L+nB),h)。系统配备的位置传感器一般为轴编码器,由图2可知:拖动系统通过链条传动,链条中部有换向齿轮。位置传感器的感应轴固定在换向齿轮轴上,齿轮轴转动的角度与链条走动的距离成比例,齿轮的转向与H-ADCP移动的方向对应。安装初期确定了H-ADCP的初始高程,结合位置传感器记录的位移,就可以推算出H-ADCP当前高程。
H-ADCP拖动设备实现将H-ADCP拖动到预定高程水层,如图3所示,拖动设备由PLC控制器、伺服电机控制器、伺服电机、减速机、运载小车等5部分组成。H-ADCP固定在运载小车上,小车在轨道上做直线运动,伺服电机给小车提供运动的动力,小车运动方向、距离等停车位置信息由PLC控制器内置程序控制。
数据采集器向PLC下发位置调整命令后,PLC控制器收悉后向伺服电机控制器下发电机运行信号,伺服电机开始转动,电机运行过程中同步向伺服电机控制器反馈状态信号,如果接收到异常信号,则关停伺服电机,同时输出告警信号,PLC控制器收到告警信号后,及时启动内部保护机制,向数据采集器报告异常信息(如电机过载等),数据采集器将收到的异常信息报送到流量计算平台,以便系统运行维护人员解除报警。系统配备减速机为蜗轮蜗杆减速机,用以保证运载小车以合理的速度运行,且当电机关停后能锁住运载小车,避免因重力作用向下滑动。
为了避免运行期间H-ADCP位置出现累计偏差,系统配备了基点对准传感器,系统每运行1 d,PLC控制器驱动运载小车运行到基点和基点对准传感器校准1次,保证H-ADCP位置准确。
H-ADCP实现断面各层各点流速测量。测量基于声学多普勒频移原理,传感器发射的声波脉冲遇到移动目标(水中颗粒物)反射后频率发生变化,频率变化量与移动目标速度成函数关系。假定水中颗粒物与水流速度相等,基于此法确定点流速;发射声波脉冲和接收的反射声波脉冲的时差与反射点和H-ADCP的距离成函数关系,基于此法确定相应点的位置。
2.2 断面流速采集子系统设计要点
为保证有较高的测量精度,基于该法测流需要科学确定测流层数、测层位置,合理确定H-ADCP运行轨道长度,合理设置H-ADCP内部参数。
2.2.1 流速测验层数和测层高程的确定
流速测验层数和测层高程直接影响到流量测验精度,需结合实际断面和当前水位情况2个要素确定。因H-ADCP测量存在盲区,断面流量由实测部分流量和盲区估算部分流量组成,盲区部分流量估算会有偏差,为了提高断面流量测验精度,实测部分面积应该尽量大,尽量占断面过水面积的70%以上。
基于该方法,H-ADCP依次运动到各测层进行测量,每运动一步(从一个测层到下一个测层),通常历时约30 s,每层测量历时约90 s,以避免水的脉动对测量成果质量的影响。测量层数多耗时就长,为了兼顾精度和效率,一般最多测量5层;结合大断面情况,层间距可等宽也可以不等宽。也可以借鉴流速仪5点测流法,通过断面当前水位,依次计算出断面相对平均水深0.2,0.4,0.6,0.8位置的高程,H-ADCP依次运行到上述位置进行测量。
另外,当水位很低、H-ADCP可运行的距离有限时,需视具体情况减少测量层数,一般最小层宽(测流单元格高度)不小于0.3 m。
为了减少测量层数提高测量效率也可以单层测量,单层测量位置可以用以下方法確定。控制器驱动程序构建前,用走航ADCP或者流速仪法测量断面流量,反推断面平均流速,然后在断面上寻找测层平均流速与断面平均流速最接近的特定层,作为H-ADCP的驻测层。在捕捉过程中可能会有多个水层和断面平均流速接近,优先选择距离层流速最大且靠近水面的测层,因为这样的测层有效测量宽度最大,实测流速点最多。当水位变化后,这种特定流速层的高程会发生变化,需要动态调整,可以在高水位和低水位分别确定这样的测层,依据这两个高程建立水位与H-ADCP驻测高程的关系式,以简化测次。或采用多层测量与单层测量相结合的方式,内部程序依据最新多层测量结果确定单层测量时H-ADCP驻测高程[8]。
2.2.2 轨道长度的确定
轨道长度取决于可测最低层高程、可测最高层高程、岸边坡度等3个因素。其中可测最低层高程和可测最高层高程应根据断面情况及断面多年水位变化特性确定。可测最高层高程应取断面多年最高水位值减去该水位级时H-ADCP最小淹没深度(因为H-ADCP 测量时发射的声波波束呈发散状,波束中轴距离水面太近,侧瓣波束运行一段距离后容易折射出水面,具体与河宽和传感器的声束的发射角有关)。当水位较低时,为保证最小淹没深度,H-ADCP的测层高程也降低,低到一定程度时声波波束侧瓣波束刚抵达对岸位置接近触底,此时的高程定义为可测最低层高程。可测最高层高程和可测最低层高程区间为H-ADCP有效测量区间,通过确定的测量区间和岸边坡度,即可确定轨道长度[9]。
2.2.3 H-ADCP其他测量参数的确定
和流量计算相关的参数主要包括测量盲区、单元格宽度、流速输出格式等,这些参数一般通过水面宽来确定。当水面较宽,盲区和单元格可以适当设置宽一些,反之可以设窄一些。H-ADCP流速输出主要有层平均流速和多点流速,因岸边有测验盲区,计算岸边流量时需要用到岸边最近点的流速,因此流速输出设置为多点流速格式。
2.3 断面流速采集子系统工作流程
图4为断面流速采集系统执行流程图。执行采集任务时,数据采集控制器首先向水位计发送查询水位命令,待收到水位计反馈的水位信息后,数据采集器根据内置测量算法,确定H-ADCP驻测位置高程和测量层数,再向伺服系统(H-ADCP 拖动系统)下发拖动指令,伺服系统收到数据采集控制器下发的命令后,发出拖动命令收悉回执。其后伺服系统根据命令指定的位置,开始拖动H-ADCP向目标位置运动,期间位置传感器实时向伺服系统反馈H-ADCP的当前位置,直至到达目标位置,伺服系统向数据采集控制器发送拖动任务结束回执。数据采集控制器收到回执后,开始向H-ADCP发送测量命令,H-ADCP收到测量命令后开始测量,并反馈测量结果。数据采集控制器收到H-ADCP的测量数据后向H-ADCP发送停止测量命令,先将当前水位和H-ADCP高程发送到流量计算平台(流量计算子系统),然后将当前层的各点流速报文发送到流量计算平台。完成上述测量任务后,数据采集控制器内置程序布置新的测量任务,让伺服系统拖动H-ADCP移动到新的测量层,完成其他水层流速测量,直到完成所有水层流速测量,如图5断面流速采集系统执行时序图,单层测量周期为2 min,多层测量则需历时多个测量周期。断面流量计算子系统接收完所有目标水层流速数据后开始计算断面流量。
2.4 断面流量计算子系统
断面流量计算子系统预先存贮大断面数据以及河底、边坡流速换算系数,系统内置第1节流量计算算法,当算法必需的计算参数收集齐全后,即启动流量计算程序,输出断面当前流量。流量计算子系统收集的参数包括断面水位、H-ADCP驻测各层流速时的位置(高程、起点距),流速点位置及流速等[10-11]。
断面流量计算子系统嵌入了人机交互接口,便于用户远程实时拖动H-ADCP测量期望层的流速,或者从河底到水面密集测量更多层的流速样本以提高断面流量测量精度。人机交互接口是对数据采集器内置测量方法的完善和补充。
综上所述,该流量在线测量系统工作模式分2种,即:①测量模式为现场自动测量的模式,该模式需将测量任务预先置入到数据采集器内部,程序控制自动执行。②测量模式为人工远程控制模式,在该模式下,数据采集器不主动发布测量任务,人工通过断面流量计算子系统实时发布测量任务,相关任务指令由数据采集器转发给各个部件,执行测量任务。
3 实例验证
采用上述方法,实测断面点流速样本比较丰富,且基于详细的大断面数据,计算相对复杂,一般通过计算机完成。限于篇幅,本文选择断面形状相对规则的南水北调中线工程渠首陶岔水文站测验断面,进行了一次基于该方法的流量比测试验,并对测验结果进行了校验分析说明。
3.1 陶岔水文站测验断面情况简介
陶岔站测验断面位于渠首闸下1 300 m,渠道顺直,水流顺畅,流态平稳,受上游弯道影响较小。断面处为混凝土明渠,渠道左岸边坡长约31 m,渠底宽约10 m,右岸边坡长约32 m,两岸边坡约18°。大断面如图6所示。
根据实测大断面数据,拟合的水位Z与过水面积A公式的关系式为
A(Z)=3.144 4Z2-875.54Z+60 935 (12)
式中:R2=0.999。
3.2 流量测验精度
3.2.1 实测区流量情况
水位为148.70 m时,过水面积为289.69 m2,最大水深7.6 m,相对深度0.6水层高程145.66 m,用走航式ADCP测得流量270 m3/s,同步用H-ADCP在测验断面实测7层流速数据,自水下1 m深度位置(高程147.70 m)记作第1层,层间距1 m,H-ADCP测流单元格宽度1 m,设置盲区为1 m,测验结果如表1所列。
基于該法,实测区面积222 m2(表1中层间实测面积之和),盲区面积67.69 m2,实测区面积占过水面积的76.6%,实测部分流量209.1 m3/s(表1中部分流量之和)。
3.2.2 盲区流速及盲区流量情况
因为实测底层和表层更接近盲区,选取表层(0.953 m/s)和底层流速(0.771 m/s)均值作为盲区边界平均流速,即(0.953+0.771)/2=0.862 m/s,
河底及边坡为混凝土,通过查表岸边系数取0.8,那么盲区部分流量为
67.69×0.862×0.8=46.68 m3/s,断面流量为209.11+46.68=255.8 m3/s。
3.2.3 精度分析
以走航式ADCP测得的流量270 m3/s为真值,基于此法的多层流速流量测量结果为255.8 m3/s,相对误差为-5.3%。
第3测层高程最接近相对水深0.6的位置,假定该层平均流速近似等于断面平均流速,基于此原理的单层流速流量289.69×0.971=281.3 m3/s,同上基于此算法的相对误差为4.2%。
综合分析上述测验结果可以看出:2种流量测算方法都有较高精度,虽然第1种流量计算方法相对误差稍大,这与岸边系数的选取有较大关系,可以用上文所述方法,H-ADCP的盲区流量用走航式ADCP实测,然后反推岸边系数,待断面水位(或流量)发生一定变化后,再用率定的岸边系数进行验证。
4 结 论
(1) 基于该法实测流速样本丰富,测点覆盖过水断面大部分位置,实测部分流量具有较高测量精度。
(2) 测验盲区平均流速换算系数通过走航式ADCP和H-ADCP实测数据计算获得,具有较高可信度,盲区部分流量具有较高精度。
(3) 该法应用部分流量累加法施测流量,与基于指标流速法测流系统相比,流量计算建模容易,前期不需要收集大量的高、中、低水测流样本,即便断面特性发生变化,模型参数矫正容易,断面流量测验精度更高,且投产快。
(4) 整套测流系统靠近岸边安装,与走航式ADCP以及缆道测流方法相比,具有较高的安全性,更高的测流效率,适合流量在线测量,符合当今水文行业巡测发展趋势。
(5) 本文流量校验分析选取的测流断面相对规整,实际测量层数为7层,对于天然河道,需要根据实际情况科学确定H-ADCP轨道的安装位置、测量层数、层间距,以提高测量精度和测量效率。
(6) 本系统对断面特性有一定要求,适合水面宽在8~150 m,断面平均水深在1 m及以上的河流流量测验。
参考文献:
[1] 李雨,袁德忠,周波,等.ADCP在水文测验中的应用及其发展前景[J].人民长江,2013,44(增2):35-38.
[2] 吴志勇,徐梁,唐运忆,等.水文站流量在线监测方法研究进展[J].水资源保护,2020,36(4):1-7.
[3] 杜耀东,宋星原,王俊,等.H-ADCP在复杂环境下的应用[J].人民长江,2008,39(3):37-39.
[4] 韦立新,蒋建平,曹贯中,等.基于ADCP实时指标流速的感潮段断面流量计算[J].人民长江,2016,47(1):27-30.
[5] 韦广龙.南宁站定点式ADCP指标流速与断面平均流速关系模型的建立与应用[J].广西水利水电,2016(2):17-21.
[6] 卢金友,詹正义,赵根生,等.河道中受侧壁影响的断面流速分布规律研究[J].水利学报,2012,43(6):645-652,658.
[7] 李文,冯志彬,王晓梅,等.断面岸边系数法的河流水位流量流速面积算法研究[J].科学技术与工程,2014,14(36):226-230.
[8] 王若晨,张国学,闫金波,等.水利工程调度影响下流量在线监测技术应用研究[J].人民长江,2014,45(9):51-54.
[9] 周儒夫,李晓波,谢静红,等.一种倾斜式H-ADCP探头安装平台的设计与应用[J].水资源研究,2019,8(4):389-396.
[10] 鲁青,周波,雷昌友,等.实时流量在线监测系统开发与实现[J].人民长江,2014,45(2):90-92,100.
[11] 陈志高,王祎頔,王真祥,等.ADCP数据综合处理方法及软件系统研制[J].人民长江,2017,48(7):41-45.
(编辑:刘 媛)
引用本文:
张国学,史东华,冯能操.
基于H-ADCP的河道断面多层流速测量与流量计算
[J].人民长江,2021,52(8):78-83,132.
Multi-layered velocity measurement and discharge calculation method
of river section based on H-ADCP
ZHANG Guoxue,SHI Donghua,FENG Nengcao
( Bureau of Hydrology,Changjiang Water Resources Commission,Wuhan 430010,China )
Abstract:
Accurate and efficient monitoring of river cross-section discharge has always been the focus of online hydrological monitoring.In order to solve the problems,such as difficult to collect distributed data of river cross-section velocity and tough to build model for index velocity formula,large error in the existing online current flow measurement technology,we proposed a multi-layered velocity measurement method based on H-ADCP.The flow calculation formulas for the measured and blind areas are provided by the partial flow accumulation method.And the implementation process of on-line flow measurement system based on this method is introduced.Taking the test section of the Taocha Hydrologic Station at the head of the middle route of South to North Water Diversion Project as an example,we carried out error analysis on discharge calculation results based on this method and that based on navigable ADCP.The results show that the online flow monitoring system built by this method has high measurement accuracy and good timeliness,and it has a good reference to the application of H-ADCP used in flow on-line monitoring.
Key words:
H-ADCP;multi-layered velocity measurement;section discharge calculation;Taocha Hydrologic Station;Middle Route of South to North Water Diversion Project
猜你喜欢
初中生学习指导·提升版(2022年4期)2022-05-11
电脑爱好者(2021年12期)2021-06-22
电脑爱好者(2021年8期)2021-04-21
第二课堂(小学版)(2021年4期)2021-01-18
大众科学(2020年7期)2020-10-26
数学大王·趣味逻辑(2020年6期)2020-06-22
数学大王·趣味逻辑(2020年5期)2020-06-19
文萃报·周二版(2019年8期)2019-09-10
小雪花·初中高分作文(2019年2期)2019-06-27
小天使·六年级语数英综合(2018年1期)2018-10-08