市政BIM 正向设计中结构计算应用探讨
2021-09-18 09:07季鑫宇
城市道桥与防洪 2021年8期
季鑫宇
(重庆市设计院有限公司,重庆市 400015)
0 引言
BIM 技术提出至今已过去十几年,首先在建筑行业得到了大力推广,并以其可视化、信息化等突出的特点在水运工程、公路工程、市政工程等基础设施建设领域不断发展、创新。BIM 技术是传统基建行业与大数据、人工智能、物联网等高新技术融合的一个重要切入点,因此BIM 技术在基建领域中的的推广相当必要。
目前,BIM 技术的应用普遍先使用二维CAD 设计,然后根据CAD 图纸建立BIM 模型,并以此模型进行展示、模拟、分析、检查等应用。这种BIM 逆向设计的解决方案只是BIM 发展的一个阶段,BIM 技术的应用应该往正向设计的方向发展。针对市政工程而言,BIM 正向设计是在高精度数字三维地形(dem)环境中,直接利用BIM 软件进行道路选线、道路平纵设计、结构设计等。
BIM 技术在市政工程中的应用存在几个难点:一是BIM 软件从欧美引进与国内规范结合不紧密;二是市政道路为带状结构体量大,对电脑性能要求高;三是市政道路多含复杂空间结构,标准化、参数化难度大,加之软件局限性强,从而加大了建模难度[1]。因此,市政工程的BIM 正向设计难度很大,其中的结构设计、计算就是难点之一。
1 应用路线
目前的设计方法中,结构计算方面通常是根据CAD 设计图纸单独建立有限元计算模型进行计算分析。在BIM 正向设计方法中,为了保证计算结果的准确性,提高设计效率,需要将BIM 模型与结构有限元模型统一起来,保持两个模型的一致性。
因此,在BIM 正向设计中的结构计算方面,BIM模型与有限元模型需要具有良好的数据交互性。现主要探讨基于Autodesk 平台的BIM 正向设计结构计算应用路线。Robot 与Revit 建模软件具有良好的数据交互性,能够实现双向“无缝连接”[2]。该应用路线主要利用Revit 软件在结构板块中建立结构模型,并且可以同时生成结构分析模型。然后,在该分析模型中建立边界条件设置各节点的连接方式,添加荷载工况,完成一致性检查后可以直接将该分析模型传递到Robot 结构计算软件中。在Robot 软件中,可以继续对各结构的截面形状、材料、边界条件、荷载工况、荷载组合等进行调整修改,完成设置后可以进行结构计算分析。该应用路线如图1 所示。

图1 结构计算应用路线图示
Robot 进行计算分析后,可以将计算后的结果、模型传递回Revit,完成BIM 模型更新,并进行之后的配筋设计等。
2 Robot 与Midas 计算对比
市政工程中的结构计算多采用Midas、桥梁博士、ANSYS 等有限元软件。Robot 软件在市政工程中应用较少,现依托市政工程中常见的连续弯箱梁结构对比分析Robot 与Midas 的计算结果。
2.1 项目概况
某项目匝道桥上部结构采用3×30 m 连续弯箱梁,一期恒载混凝土容重γ=26 kN/m3,桥面铺装均布荷载38.2 kN/m,护栏均布荷载15.0 kN/m,基础不均匀沉降0.5 cm 计,整体升温取12.3℃,整体降温取-20℃。
2.2 结构计算模型
Robot 分析模型直接由Revit 传递过来,保证了BIM 模型与有限元模型的一致性。Robot 分析模型继承了BIM 结构模型的几何特性;材质信息;节点连接方式、支撑类型等边界条件;结构自重、二期恒载等荷载工况。该分析模型可以在Robot 软件中继续进行修改、调整,并根据荷载组合规范进行荷载组合,为分析计算做准备。
2.3 分析结果对比
为了验证Robot 软件在市政工程结构计算方面的可行性、适用性,利用Midas 软件的计算结果与Robot 进行对比分析。根据城市桥梁荷载标准[3]并按荷载分项系数组合[4]计算,对比结果如下。
2.3.1 总位移
匝道桥上部结构的总位移DZ对比如图2 所示。Midas 计算结果的总位移DZ为-3.7 cm,最大位移出现在箱梁第一、三跨跨中位置;Robot 计算结果的总位移DZ为-3.7 cm,最大位移出现在箱梁第一、三跨跨中位置。由此可见,两种计算结果的总位移基本一致。
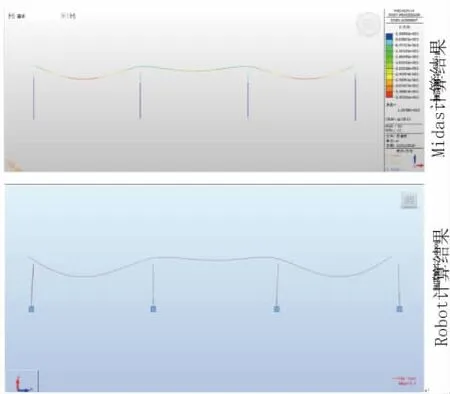
图2 总位移DZ 图示
2.3.2 My弯矩包络图
该弯箱梁的My弯矩包络图对比结果如图3 所示,两种计算结果显示的包络图形状基本一致。最大正弯矩都出现在第一、三跨跨中位置,最大负弯矩出现在第二、三支柱位置处。

图3 My 弯矩包络图
2.3.3 Fz 剪力包络图
该弯箱梁的Fz剪力包络图对比结果如图4 所示,两种计算结果显示的包络图形状基本一致。Midas 软件的Fz计算结果最大值为-7 252 kN,Robot 软件的Fz计算结果最大值为-6 579 kN。两种结果误差为9%,结果相差不大。

图4 Fz 剪力包络图
通过总位移DZ、My弯矩包络图、Fz剪力包络图的对比,可以验证Robot 计算结果的可行性。
3 应用总结与探讨
结构计算分析在设计工作中是十分重要的部分,BIM 正向设计需要将BIM 模型与结构有限元模型统一起来,使两个模型具有一致性、交互性的特点,以达到提高设计效率、保证计算准确的目的。
(1)Robot 与Revit 具有良好的“无缝连接”数据交互模块,Revit 结构计算模型可直接传递于Robot进行计算,Robot 也可将计算结果返回于Revit 中。
(2)Robot 的计算结果与Midas 进行对比后,验证了Robot 软件在市政工程常见结构计算中的可行性。
(3)Robot 软件来源于国外,其部分内容需修改调整。
(4)Revit 软件的空间曲面造型能力不足,市政工程中具有复杂空间曲面的结构在Revit 中无法建立,也就不能与Robot 进行交互。该复杂结构可尝试直接在Robot 中建立有限元模型或者借助其他有限元软件进行计算并利用中间模型文件格式进行交互。
4 结语
本文提出了市政工程BIM 正向设计中的结构计算应用路线,通过Revit 建立BIM 模型,从而同时生成Revit 的分析模型,并传递到Robot 结构计算软件进行计算。
通过对Robot 与Midas 两个软件的计算结果进行对比分析,验证了Robot 软件在市政工程常见结构计算中的可行性。
由于市政工程呈带状、体量大等特点,BIM 正向设计涉及诸多问题,本文仅仅就结构设计计算部分提出了探讨,以望能够提供一定的参考价值。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
甘肃科技(2020年20期)2020-04-13
工程与建设(2019年4期)2019-10-10
小天使·三年级语数英综合(2017年6期)2017-06-07
中国医学装备(2016年6期)2016-12-01
广西科技大学学报(2016年1期)2016-06-22
山东工业技术(2016年12期)2016-06-13
工程建设与设计(2016年8期)2016-03-11
燕山大学学报(2015年4期)2015-12-25
火炸药学报(2014年3期)2014-03-20