
集成化多线列激光雷达模拟前端微组件设计
2021-09-15 10:04林元琦赵毅强郑肖肖杜建艳
光电工程 2021年8期
林元琦,赵毅强*,叶 茂,郑肖肖,杜建艳
集成化多线列激光雷达模拟前端微组件设计
林元琦1,2,赵毅强1,2*,叶 茂1,2,郑肖肖1,2,杜建艳1,2
1天津大学微电子学院,天津 300072;2天津市成像与感知微电子技术重点实验室,天津 300072
多线列激光雷达具有广泛的需求,而现在的激光雷达探测处理电路多采用分立元器件组成,且探测器与处理电路相分离,存在体积大、成本高、可靠性差等问题。针对上述问题,本文基于系统级封装技术,设计了一种集成化的16元激光雷达模拟前端微组件,对多元激光雷达微组件的研究具有重要的现实意义。该组件集成了16元线列雪崩光电二极管探测器、自研的多通道激光雷达模拟前端读出电路芯片、温度传感器和半导体制冷器等,实现了探测、处理和温控一体化。测试表明,微组件的恒温稳定性为0.07 ℃,其带宽可达190 MHz,集成化微组件的噪声水平相比非集成化组件降低了32%以上,实现了对5 ns激光窄脉冲的高速探测。
激光雷达;线列APD;集成化;微组件

1 引 言
激光雷达是一种基于激光测距技术的环境感知系统,相对于视觉成像系统,可以直接获取目标的三维信息,从而提高目标快速检测和识别的准确度。激光雷达在获取点云数据方面具有极强的优势,被广泛应用于自动驾驶、机器人、无人机、地形测绘、气象监测等领域[1-4]。
光电探测系统作为多线列激光雷达的核心部分,是激光雷达的“眼睛”,其性能的优劣直接决定了激光雷达的集成度和可靠性[5]。为满足复杂应用场景的需求,脉冲激光雷达探测系统逐渐采用多线列探测器实现多通道探测,以快速创建环境的三维图像。目前多线列脉冲激光雷达探测系统的模拟前端处理电路多采用分立的元器件搭建,单通道处理电路在一片PCB板上实现,在单通道的基础上重复堆叠相同的结构实现多通道处理电路。它的体积相对大,因此难以实现系统级集成,导致其成本高、功耗高、噪声高[6]。为了满足市场需求,集成化是激光雷达探测系统的发展方向,同时也是亟待解决的问题[7-8]。
国外对激光雷达的研究起步早,激光雷达技术迅速发展。上世纪80年代后,各种激光测距样机被研制,广泛应用于空间测量、地形测绘、海洋探测等领域[9]。
林肯实验室作为军用激光雷达的代表,于2002年采用4×4的阵列雪崩光电二极管(avalanche photon diode, APD)探测器,基于盖革工作模式,结合532 nm的激光器,研制了第一代三维成像激光雷达探测系统[10]。作为民用激光雷达的领跑厂商,美国的Velodyne公司于2007年率先推出64线机械式车载激光雷达,助力无人自动驾驶。该雷达采用分立元器件组成,探测系统由64片模拟前端读出电路板堆叠而成,每个探测通道对应一片电路板。随后该公司进行产品迭代,推出32线、16线、128线机械式激光雷达,机械激光雷达系统结构如图1所示。2017年,日本三菱电机公司三维成像激光雷达技术取得新进展,设计了基于平面波导线列激光二极管、线列InAlAs APD和线列读出电路的激光雷达系统[11],实物如图2所示。2018年,韩国梨花女子大学电子工程系研究人员在发表了一种适用于无人驾驶车辆的脉冲激光雷达线性模式模拟前端组件。该组件采用双列直插式封装的16元线列PIN光电二极管探测器和16通道的读出电路,集成在一片PCB板上,完成了组件设计[12],实物如图3所示。

图1 32线激光雷达的探测结构

图2 日本三菱电机公司的雷达样机
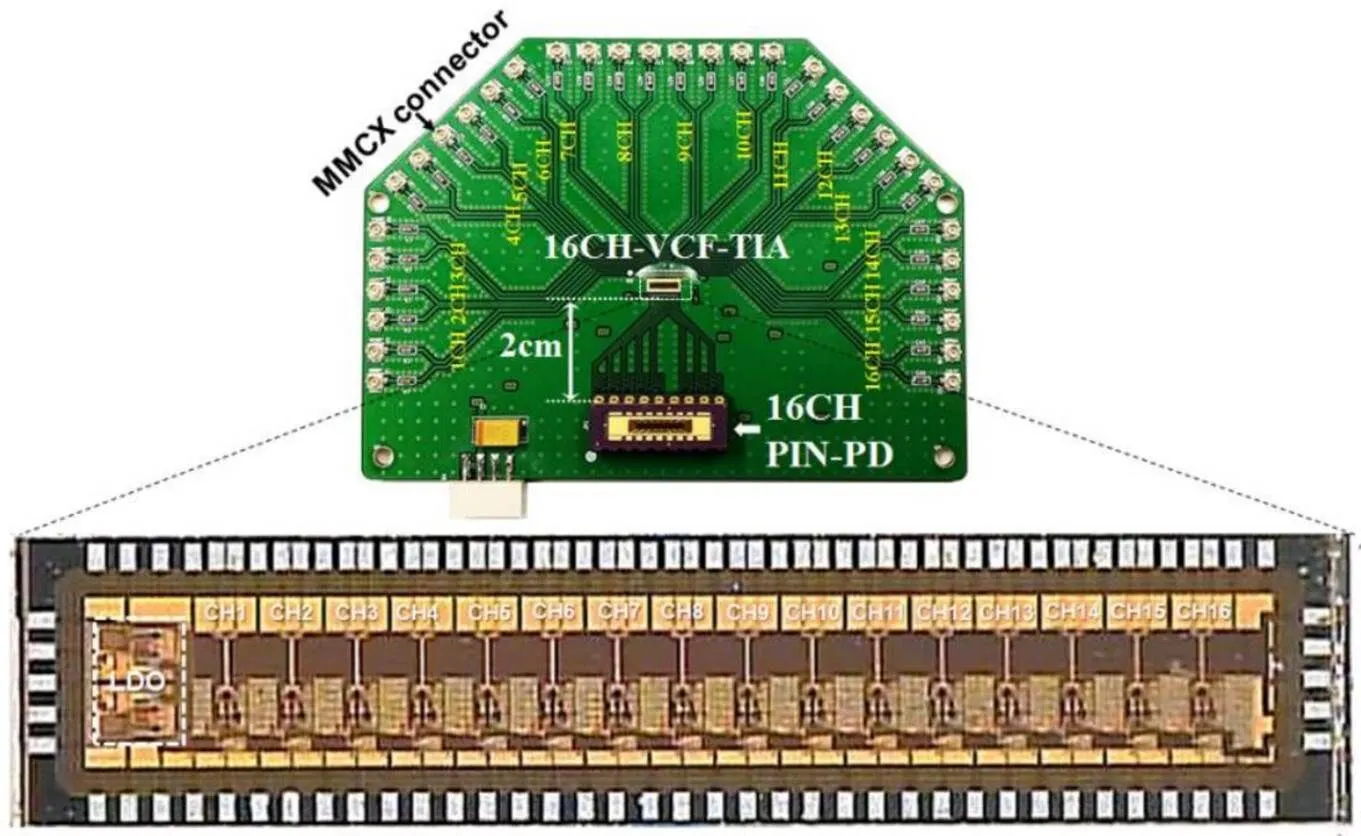
图3 16通道激光雷达模拟前端组件
国内激光雷达技术近年来发展较为迅速,取得了一定成果。2010年,中国科学院上海技术物理研究所利用分立式盖革模式APD探测器对成像系统进行了原理验证,采用3×3的APD阵列实现了对目标的三维成像[13]。2013年,哈尔滨工业大学成功设计了8×8线性模式APD阵列激光雷达系统[14]。该系统基于分立元器件设计了64路信号处理电路,探测组件实物如图4所示。2015年,桂林理工大学设计了基于5×5光纤耦合阵列APD探测器的Flash激光雷达系统,系统采用分立式元器件组成,如图5所示[15]。2017年,天津大学完成了自混频面阵探测器与读出电路芯片的集成化封装,研制了调频连续波激光雷达成像系统,并实现了对目标的距离信息和灰度信息的获取[16-17],实物如图6所示。2018年至今,禾赛科技、速腾聚创等车载激光雷达厂商面向无人自动驾驶领域,不断开发多款车载激光雷达产品,且朝着集成化、小型化、多线列的方向发展,现有产品的直径约为100 mm。

图4 哈尔滨大学的阵列激光雷达模拟前端组件

图5 桂林理工大学的激光雷达系统

图6 天津大学的模拟前端组件
综上所述,国内外激光雷达系统多采用分立元器件搭建,高性能集成化的激光雷达系统研究较少,还在发展中。同时,现有激光雷达探测系统很少考虑温度的影响:一是温度变化将会导致APD探测器的响应度发生变化[18-19],从而引入测距误差;二是环境温度低于结霜点时,APD探测器和读出电路芯片的表面会结霜或者出现冰层,存在短路等安全隐患。因此,本文面向多线列激光雷达探测系统,基于系统级封装(system in a package, SIP)技术设计了一种集成化的16元激光雷达模拟前端微组件,实现探测、读出和温控一体化的功能。
2 激光雷达模拟前端微组件设计
2.1 16元线列APD探测器的增益特性
本文设计的微组件应用于激光波长为905 nm的激光雷达系统,所选用的探测器是基于Si材料的高集成度的16元线列APD,16个单元APD呈一字型排列,光谱响应范围为400 nm~1100 nm,倍增因子为100时,905 nm波长的最佳峰值响应度为55 A/W。
APD的倍增因子容易受到温度的影响,当APD的工作偏压固定时,如果外界的温度发生了变化,倍增因子将会发生变化,温度升高,倍增因子下降,最终导致APD对激光回波的响应度下降[20]。该线列APD的倍增因子-偏压-温度曲线如图7所示,图中表示温度分别为-20 ℃、20 ℃和60 ℃时的增益与偏压的关系。根据图7可以得出倍增因子受温度影响变化的趋势,当温度为20 ℃时,设定APD的工作偏压约为143 V时,倍增因子为100;当温度升高至60 ℃时,倍增因子下降到25附近。因此需要稳定APD探测器的温度以减小增益的变化。

图7 APD的倍增因子-偏压-温度曲线
2.2 多通道激光雷达模拟前端读出电路芯片的架构
多通道激光雷达模拟前端读出电路(Multi-channel LiDAR AFE ROIC)芯片是面向多线列激光雷达的回波信号快速读出的自研集成化芯片。该芯片集成了8个通道,架构如图8所示,每个通道基于可变增益的跨阻放大器(transimpedance amplifiers, TIA)、差分放大器(differential amplifier)和模拟补偿器(analog equalizer)三级结构组成。第一级采用并联反馈拓扑结构,优化了整体噪声,并实现增益动态调节;第二级采用全差分套筒式共源共栅运放结构,增大了输入动态范围;最后一级采用容性退化技术添加源极负反馈电阻和电容,有效扩展了电路带宽。

图8 多通道激光雷达模拟前端读出电路芯片的架构
该芯片采用CMOS 0.18mm工艺,实物如图9所示。其特点为:芯片单通道的带宽为200 MHz;内置4个增益挡,可以通过控制信号实现65 dB,80 dB,90 dB和100 dB的增益动态调节,从而扩大了读出电路的动态范围;等效输入噪声为4.6 pA×(Hz)-1/2;单通道工作电流11.8 mA,工作电压为3.3 V,功耗仅为39 mW;输出采用差分结构,提高了抗共模干扰的能力;芯片尺寸为2.5 mm´2.0 mm。相对于由分立元器件搭建的多通道读出电路,采用芯片级处理电路替换原有板级系统,有助于实现光电探测系统集成化和小型化。
图9 多通道激光雷达模拟前端读出电路芯片实物图
2.3 光学窗口设计
由于线列APD的光谱响应范围广,除了可以响应激光发射系统的激光波段,还可以响应可见光以及其它红外波段。因此激光雷达在应用时会受到背景光的影响,尤其是在白天易受到太阳光的干扰,以及其它人造光源的影响。对于背景光的影响,可以在探测器前加入窄带滤光片作为光学窗口,使有用的激光波段通过,而抑制其它波段的背景光。本文针对自研的905nm脉冲式激光器,设计了滤光片的参数,以实现背景光噪声的抑制和激光回波的高效透过。激光器的波长在23 ℃时,其中心波长为905 nm,半峰宽为±5 Nm。但是中心波长受温度影响会发生漂移,在-40 ℃~80 ℃时,中心波长在885 nm~915 nm之间变化,其漂移特性如图10所示。为了减小中心波长漂移带来的影响,使整个系统可以在宽温度范围内稳定工作,本文结合所使用的线列APD是Si探测器,它的光谱响应范围为400 nm~1100 nm,从而确定滤光片的参数:透过率95%@880 nm~920 nm,截止深度OD3@400 nm~850 nm & 950 nm~1100 nm。滤光片经生产完成后,本文对滤光片实物进行参数测试,测试结果如图11所示,可看出参数指标接近理论值,符合设计要求。

图10 激光器的中心波长的温漂特性
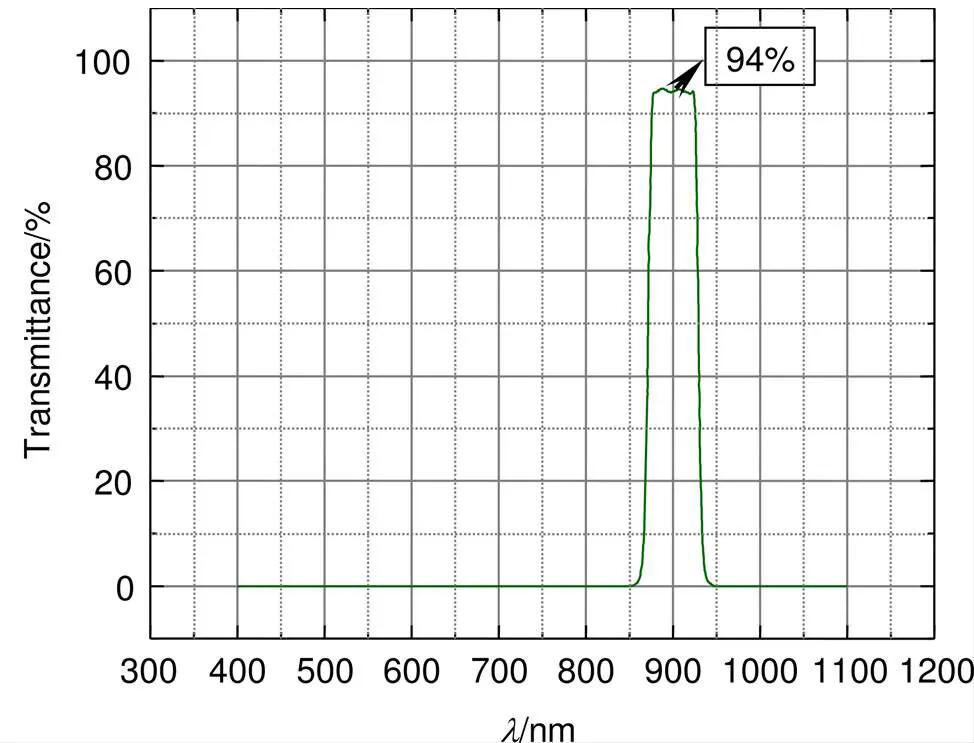
图11 滤光片的透过率
2.4 基板设计
基板为16元线列APD探测器和2个Multi-channel LiDAR AFE ROIC芯片提供支撑、电连接、散热等功能,以实现APD探测器和Multi-channel LiDAR AFE ROIC芯片的系统级封装。基板选择高导热系数为2.0 W/(m×K)的铝基材,以便为芯片提供良好的散热通道。
基板设计需要优化走线,减小寄生电容对探测电路的影响。根据信号完整性理论,信号线与GND平面、VCC平面存在寄生电容,这些寄生电容可以用平板电容近似描述,其表达式为

其中:为电容,为相对介电常数,为平行板的面
积,为平行板的间距[21]。根据式(1),为减小寄生电容,板子走线时需要缩短信号线的长度和宽度。因此,设计PCB走线时,APD的Pad与Multi-channel LiDAR
AFE ROIC芯片的Pad之间采用拓扑结构短而细的互连线,同时将互连线底部的GND平面、VCC平面挖空,从而减小寄生电容。
2.5 微组件实现
SIP技术是指在一个封装中集成一个微系统,通常在一个小型基板上,将若干不同功能的裸片和微型无源器件通过微互连技术(如引线键合和倒装焊等)连接,可以有效降低系统的体积,形成高性能的具有系统功能的微型组件。SIP封装内的裸片之间的互连线长度短,降低了信号的寄生参数,提高了系统的高速性能和降低了噪声水平[22]。
TIA对输入电容敏感,输入电容过大会增加电路的噪声水平,输入电容包括探测器的寄生电容和探测器与TIA输入端互连线的寄生电容,其对噪声的影响可以表示为[23]


本文采用真空管壳实现封装结构。真空管壳采用金属墙-陶瓷绝缘子结构,具有极好的气密性和可靠性,整体由金属底座、金属壁、双列直插引脚、铜排气管、具有窗口的顶盖组成。铜排气管与外壳一体化,以便将管壳腔内抽真空,当抽真空后可将排气管截掉并封口。为实现管壳内基板温度的控制,减小温度对APD探测器的影响,管壳内部设计了半导体制冷器(thermoelectric cooler, TEC)的安装位置。TEC是固体器件,具有无噪音、无振动和方便安装等特点,通正电流可以实现制冷,通负电流可以实现制热,因此通过外部驱动电路对TEC进行控制,可以实现管壳内部的恒温控制。真空管壳抽取真空既可以减少管壳热辐射回传到壳内基板上,也具备抵抗恶劣环境影响的能力,如防止在低温环境下APD探测器和Multi-channel LiDAR AFE ROIC芯片的表面结霜或者结冰,避免出现短路安全隐患。
基于SIP技术,本文将16元线列APD探测器、Multi-channel LiDAR AFE ROIC芯片、铝基板、TEC和温度传感器PT1000集成在真空管壳内,完成了16元激光雷达模拟前端微组件设计。SIP封装方案如图12所示,图中红色线条表示金线,序号1~44为微组件的引脚编号。微组件的实物图如图13和图14所示。

图12 微组件的系统级封装方案图

图13 16元激光雷达模拟前端微组件内部结构

图14 16元激光雷达模拟前端微组件外部结构

图15 微组件的温度稳定性测试
3 实验结果及分析
搭建测试平台,开展对模拟前端微组件的温度稳定性、带宽、噪声水平、激光脉冲响应等性能指标的测试,以验证微组件探测、读出、温控一体化的性能。
3.1 温度稳定性测试
对微组件进行恒温控制时,恒温温度越低,功耗越高,但是噪声将会降低。为兼顾功耗和噪声,本将微组件工作时的恒温温度设置为20 ℃,实现探测器增益的稳定,同时使电路噪声水平较低。
温度稳定性测试平台如图15所示。为了避免利用万用表测量PT1000的电阻时,对温度控制电路带来影响,本文在测试管壳内放置两个PT1000,一个接入温度控制模块,一个连接万用表。测试原理:温度控制电路板通过基板上的一个PT1000获取基板的实时温度,通过PID控制技术驱动TEC,产生制冷或者加热的功能,同时本文基于RIGOL DM3068万用表的四线式电阻测量功能,每隔0.5 s精确测试另一个PT1000的电阻值,并将测量值实时传递给上位机,然后根据PT1000的电阻与温度的关系解算得到基板的实时温度。该温度控制电路板的恒温调节时间为180 s。
测试时调节干燥箱的温度分别为5 ℃、10 ℃、25 ℃、30 ℃、40 ℃以模拟不同的环境温度。恒温控制电路的恒温温度设置为20 ℃,工作时长分别为1 h。测试结果表明,经过约180 s,基板的温度趋于稳定,稳定后的波动值为0.07 ℃,能够实现高精度的恒温控制。图16所示的是环境温度为25 ℃时基板温度随时间的变化曲线图。

图16 板温度随时间的变化

表1 微组件的整体带宽
3.2 带宽测试
微组件的整体带宽为APD探测器与Multi- channel LiDAR AFE ROIC芯片的级联带宽,需用可调正弦波激光信号进行带宽测试。测试时可调正弦波的频率范围为20 kHz~240 MHz,测试结果如表1所示。
实验结果表明,微组件在不同增益挡下的整体带宽接近Multi-channel LiDAR AFE ROIC芯片的带宽200 MHz。带宽未达到200 MHz的原因,是测试过程中连续波激光系统产生的正弦波光信号含有较大的直流分量。APD探测器与Multi-channel LiDAR AFE ROIC芯片采用直流耦合方式,因而不能消除直流分量,直流分量的引入降低了读出电路的动态范围。因此测试时为了不让读出电路饱和,通过对光调试使得进入探测器的光强度较小,导致微组件探测到的正弦波激光的信噪比较低,造成了正弦波幅值的测量存在误差。
3.3 噪声水平测试
本文同时测试了非SIP技术集成的光电探测电路板的噪声,以验证基于SIP集成的微组件的优势。光电探测电路板所用的线列APD探测器和Multi-channel LiDAR AFE ROIC芯片与微组件所用的相同,区别在于线列APD探测器封装在DIP管壳里,DIP管壳转接在光电探测电路板上,Multi-channel LiDAR AFE ROIC芯片采用COB(chip on board)封装,实物如图17所示。

图17 光电探测电路板

表2 两种组件的RMS噪声的对比
本文分别测试了室温下组件的电路增益为65 dB、80 dB、90 dB和100 dB时的噪声水平,两种组件结构的RMS噪声的对比结果如表2所示。
实验结果表明,相对于非SIP集成的模拟前端组件,SIP集成的模拟前端处理组件在电路增益为65 dB、80 dB、90 dB、100 dB时,噪声水平分别下降了50%、32%、41%、44%。SIP集成组件的噪声水平低的实验结果与2.5节中的理论分析相符合,同时,根据式(2),可以看出噪声水平与跨阻增益f成非线性的关系,所以不同增益下的噪声水平下降比不同。
对于非室温下的噪声水平的下降比,本文从理论的角度加以分析。根据式(2),假设SIP集成组件的噪声水平为


非SIP集成组件的噪声水平为



3.4 激光脉冲响应测试
本文搭建了移动式实验平台,实验地点在宽敞的楼道里,测试环境如图18所示。激光器、微组件及测试板、接收光学系统通过光学平台夹具和三维位移平台固定在光学面包板上,以便实现灵活的对光调试。测试时所使用的脉冲激光器的波长为905 nm,半峰宽为5 ns,峰值功率为100 W,重复频率为20 kHz。
用激光器照射目标,目标反射的激光回波通过接收透镜汇聚到微组件的APD探测器上,微组件探测到的激光回波通过示波器观察。不同增益下的激光脉冲响应结果如图19所示,微组件的信号输出类型为差分结构,图中所示的是差分信号相减后的结果,图中增益为65 dB (1778)、80 dB (10000)、90 dB (31622)、100 dB (100000)时的脉冲峰值分别为11 mV、63 mV、190 mV、650 mV。增益10000、31266、100000与最低增益1778的比值分别为5.6、17.8、56.2,脉冲峰值63 mV、190 mV、650 mV与11 mV的比值分别为5.7、17.2、59.0,因此不同脉冲峰值的比值与不同增益的比值基本一致。实验结果表明,微组件可以实现对5 ns激光脉冲的高速探测。

图18 16元激光雷达模拟前端微组件测试环境
微组件的通道一致性的测试环境如图20所示,激光器发出的光不经过光学系统,发散的激光到达探测器的16个像元,以便使每个像元上的激光能量尽可能地一致,从而准确测试16通道的一致性。
记录16通道探测到的脉冲幅度,并进行归一化处理,结果如表3所示。第6、7、14通道的幅度最小,第10、12通道的幅度最大,最小幅度与最大幅度的比值为0.92,因此16通道具有较高的一致性。由于实验条件有限,无法使得实验中每个像元上的激光能量完全相同,所以存在一定的实验误差,导致一致性程度的测量结果偏低。
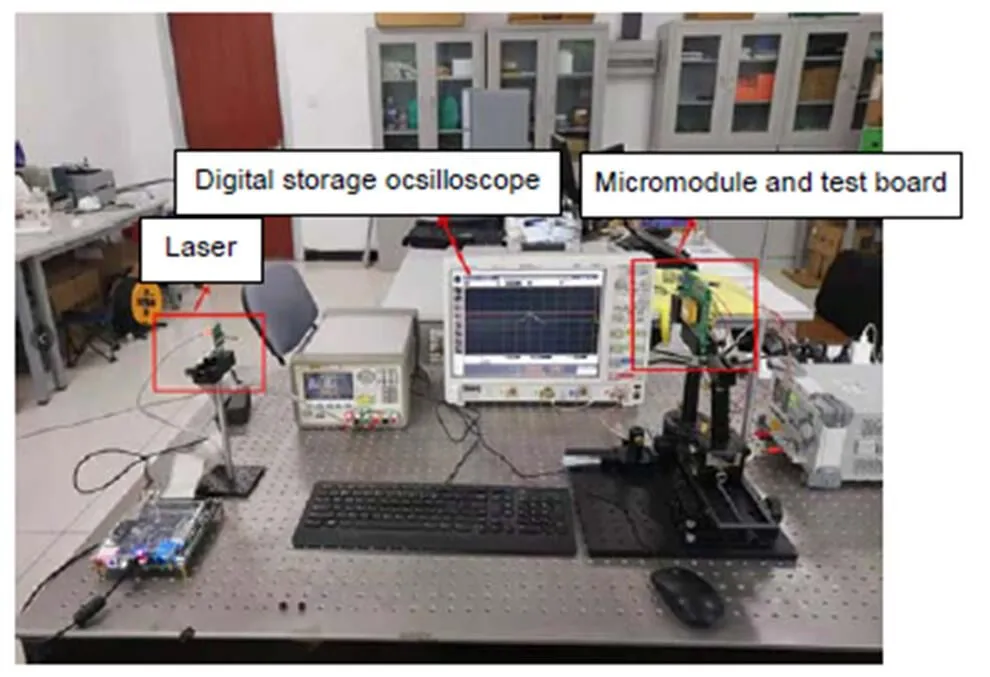
图20 微组件的通道一致性测试

表3 16通道的归一化脉冲幅度
4 结 论
面向激光雷达探测系统,本文基于SIP技术设计了一种集成化的16元激光雷达模拟前端微组件,实现了探测、处理和温控一体化,提高了多线列激光雷达的集成化程度和可靠性。相较于主流的探测系统,本文设计的微组件的特点如下:
1) 采用自研的集成化元件,缩小了组件的体积,同时可以有效降低成本;
2) 设计了温度控制结构,降低了温度对探测器增益的影响,提高了不同环境温度下探测的可靠性;
3) 采用真空管壳,使探测器和读出电路工作于真空环境中,可以有效防止在低温环境下APD探测器的表面结霜或者结冰,避免出现短路安全隐患,从而提高了低温环境下的可靠性。
测试表明:微组件的恒温稳定性为0.07 ℃;微组件的带宽为190 MHz;相比于未使用SIP集成的组件,微组件的噪声水平至少下降了32%;对于5 ns的激光窄脉冲,微组件可以做出快速响应。
[1] Zhu F H, Gong K, Huo Y J. A wide dynamic range laser rangefinder with cm-level resolution based on AGC amplifier structure[J]., 2012, 55(2–3): 210–215.
[2] Castorena J, Creusere C D. Sampling of time-resolved full-waveform LIDAR signals at Sub-Nyquist rates[J]., 2015, 53(7): 3791–3802.
[3] Allouis T, Bailly J S, Pastol Y,. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals[J]., 2010, 35(6): 640–650.
[4] Duong H V, Lefsky M A, Ramond T,. The electronically steerable flash lidar: a full waveform scanning system for topographic and ecosystem structure applications[J]., 2012, 50(11): 4809–4820.
[5] Li J. Study on the modeling and processing algorithm of the full waveform of pulsed lidar[D]. Tianjin: Tianjin University, 2018: 1–4. 李杰. 脉冲激光雷达全波形建模与处理算法研究[D]. 天津: 天津大学, 2018: 1–4.
[6] Zheng H. Key technology research on analog front end integrated circuit and system for imaging LADAR receiver[D]. Xi’an: Xidian University, 2018: 4. 郑浩. 成像激光雷达接收器模拟前端集成电路与系统研究[D]. 西安: 西安电子科技大学, 2018: 4.
[7] Fersch T, Weigel R, Kölpin A. Comparison of laser safe scanning patterns for second generation LiDAR deflection units[C]//, Prague, Czech Republic, 2017: 1–9.
[8] Ta T T, Kubota H, Kokubun K,. A 2D-SPAD array and read-out AFE for next-generation solid-state LiDAR[C]//, Honolulu, HI, USA, 2020: 1–2.
[9] Zhu M Z, Cheng Y, Tan C Y,. Development of foreign spaceborne laser[J]., 2012, 41(12): 3241–3248. 朱孟真, 程勇, 谭朝勇, 等. 国外空间激光的发展现状[J]. 红外与激光工程, 2012, 41(12): 3241–3248.
[10] Albota M A, Heinrichs R M, Kocher D G,. Three-dimensional imaging laser radar with a photon-counting avalanche photodiode array and microchip laser[J]., 2002, 41(36): 7671–7678.
[11] Kameyama S, Hirai A, Imaki M,. Demonstration on range imaging of 256×256 pixels and 30 frames per second using short wavelength infrared pulsed time-of-flight laser sensor with linear array receiver[J]., 2016, 56(3): 031214.
[12] Hong C, Kim S H, Kim J H,. A Linear-Mode LiDAR sensor using a Multi-Channel CMOS transimpedance amplifier array[J]., 2018, 18(17): 7032–7040.
[13] Ying G, Huang G H, Shu R. 3D imaging laser radar using Geiger-mode APDs: analysis and experiments[J]., 2010, 7684: 768402.
[14] Zhu J H. Analysis and experimental research on non-uniformity of non-scanning Ladad based on APD arrays[D]. Harbin: Harbin Institute of Technology, 2013: 47–59. 朱静浩. 阵列APD无扫描激光雷达非均匀性的分析与实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2013: 47–59.
[15] Zhou G Q, Zhou X, Yang J Z,. Flash Lidar sensor using fiber-coupled APDs[J]., 2015, 15(9): 4758–4768.
[16] Hu K. Research on ROIC design technique for FM/cw LADAR based on InGaAs FPA detectors[D]. Tianjin: Tianjin University, 2017: 113–122. 胡凯. 基于InGaAs面阵探测器的FM/cw激光雷达读出电路的设计技术研究[D]. 天津: 天津大学, 2017: 113–122.
[17] Hu K, Zhao Y Q, Ye M,. Design of a CMOS ROIC for InGaAs self-mixing detectors used in FM/cw LADAR[J]., 2017, 17(17): 5547–5557.
[18] Crowell C R. Temperature dependence of avalanche multiplication in semiconductors[J]., 1966, ED-13(6): 242–244.
[19] Zhang Z Y, Yu D S, Cai Y,. Design of APD double temperature compensation circuit with high gain stability[J]., 2018, 10846: 108460Z.
[20] Prokes A, Zerman V. Temperature compensation of the responsivity of avalanche photodiodes in free-space optical communication systems[C]//, Tomsk, Russia, 2003: 102–107.
[21] Bogatin E.[M]. Li Y S, Liu Y,., trans. 2nd ed. Beijing: Publishing House of Electronics Industry, 2015: 72–78. Bogatin E. 信号完整性与电源完整性分析[M]. 李玉山, 刘洋, 等, 译. 2版. 北京: 电子工业出版社, 2015: 72–78.
[22] 刘林, 郑学仁, 李斌. 系统级封装技术综述[J]. 半导体技术, 2002, 27(8): 17–20, 34.
[23] Tumati R. Solid-state nanopore characterization and low noise transimpedance amplifier for nanopore-based gene sequencer[D]. Maine: The University of Maine, 2008: 26–35.
[24] Prokeš A. Influence of temperature variation on optical receiver sensitivity and its compensation[J]., 2007, 16(3): 13–18.
[25] Chuah J H, Holburn D. Low-noise transimpedance amplifier for pixelated CMOS photon detector in the scanning electron microscope[J]., 2013, 59(3): 226–230.
Design of an integrated multi-line LiDAR analog front-end micromodule
Lin Yuanqi1,2, Zhao Yiqiang1,2*, Ye Mao1,2, Zheng Xiaoxiao1,2, Du Jianyan1,2
1School of Microelectronics, Tianjin University, Tianjin 300072, China;2Tianjin Key Laboratory of Imaging and Sensing Microelectronic Technology, Tianjin 300072, China

The structure of 16-element LiDAR AFE micromodule
Overview:LiDAR is an environmental sensing system based on laser ranging technology. Compared with the visual imaging system, it can directly obtain the 3D information of the targets, so as to improve the accuracy of rapid detection and recognition for the targets. LiDAR is widely used in autonomous driving, robotics, unmanned aerial vehicles, topographic mapping, meteorological monitoring and other fields. At present, the detection and processing circuit of LiDAR is mostly composed of discrete components, and the detector is separated from the processing circuit, which brings high cost, poor reliability, and other problems. To solve the above problems, an integrated 16-element LiDAR analog front-end micromodule based on system-in-package (SIP) technology is proposed, which has important practical significance for the research of multi-element LiDAR micromodule. This module integrates a 16-element APD array detector, a self-developed multi-channel LiDAR analog front-end readout integrated circuit (AFE ROIC) chip, a temperature sensor, and a thermoelectric cooler (TEC), etc., which can realize the integration of detection, processing, and temperature control. The substrate, 905 nm narrow-band filter parameter and vacuum tube are designed, and micromodule integration is completed. The integrated multi-channel AFE ROIC chip features with 200 MHz bandwidth, four adjustable gains of 65 dB, 80 dB, 90 dB and 100 dB. The size of the integrated ROIC is 2.5 mm´2.0 mm. Compared with the multi-channel AFE readout circuit composed of discrete components, the integrated circuit chip is helpful to realize integration. Considering the heat dissipation of the chip and signal integrity, the aluminum substrate PCB with high thermal conductivity is adopted and the PCB routing is optimized. Considering that the wavelength of 905 nm semiconductor laser diode will drift due to the influence of temperature, the parameters of the filter are optimized. The vacuum shell adopts metal wall and ceramic insulator structure with excellent air tightness and reliability. The whole shell is composed of metal base, metal wall, ceramic insulation structure, double straight insert pins, copper exhaust pipe and top cover with a window. The installation position of the TEC is designed inside the shell. The TEC is a solid device without noise and vibration. It can realize cooling by passing positive current and heating by passing negative current. Therefore, the TEC can be controlled by an external TEC drive circuit to achieve a constant temperature inside the shell. An experiment is built to test the performance parameters of the 16-element LiDAR AFE micromodule such as the noise level and the response capability of laser pulse echoes. The thermostatic stability of the micromodule is 0.07 ℃, the bandwidth of the micromodule is up to 190 MHz, the noise level of the integrated micromodule is reduced by more than 32% compared with that of the non-integrated micromodule, and high speed detection of 5 ns laser narrow pulse is realized.
Lin Y Q, Zhao Y Q, Ye M,Design of an integrated multi-line LiDAR analog front-end micromodule[J]., 2021, 48(8): 210080; DOI:10.12086/oee.2021.210080
Design of an integrated multi-line LiDAR analog front-end micromodule
Lin Yuanqi1,2, Zhao Yiqiang1,2*, Ye Mao1,2, Zheng Xiaoxiao1,2, Du Jianyan1,2
1School of Microelectronics, Tianjin University, Tianjin 300072, China;2Tianjin Key Laboratory of Imaging and Sensing Microelectronic Technology, Tianjin 300072, China
Multi-line LiDAR has a wide range of application demands, but the current detection and processing circuit of LiDAR is mostly composed of discrete components, and the detector is separated from the processing circuit, which brings high cost, poor reliability, and other problems. To solve the above problems, an integrated 16-element LiDAR analog front-end micromodule based on system-in-package technology is proposed, which has important practical significance for the research of multi-component LiDAR micromodule. This module integrates a 16-element avalanche photon diode array detector, a self-developed multi-channel LiDAR analog front-end readout circuit chip, a temperature sensor, and a thermoelectric cooler, etc., which can realize the integration of detection, processing and temperature control. The test results show that the thermostatic stability of the micromodule is 0.07 ℃, the bandwidth of the micromodule is up to 190 MHz, the noise level of the integrated micromodule is reduced by more than 32% compared with that of the non-integrated micromodule, and high speed detection of 5 ns laser narrow pulse is realized.
LiDAR; APD array; integration; micromodule
Tianjin New Generation Artificial Intelligence Science and Technology Major Project Fund (2019FBH-0021)
10.12086/oee.2021.210080
TN958.98
A
* E-mail: yq_zhao@tju.edu.cn
2021-03-19;
2021-07-19基金项目:天津市新一代人工智能科技重大专项基金资助项目(2019FBH-0021)
林元琦(1995-),男,硕士研究生,主要从事激光雷达系统的研究。E-mail:yuanqi_lin@126.com
赵毅强(1964-),男,博士,教授,主要从事光电检测与成像系统,混合信号集成电路设计。E-mail:yq_zhao@tju.edu.cn
版权所有©2021中国科学院光电技术研究所
林元琦,赵毅强,叶茂,等. 集成化多线列激光雷达模拟前端微组件设计[J]. 光电工程,2021,48(8): 210080
Lin Y Q, Zhao Y Q, Ye M,Design of an integrated multi-line LiDAR analog front-end micromodule[J]., 2021, 48(8): 210080
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
北京航空航天大学学报(2021年6期)2021-07-20
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
电子制作(2019年19期)2019-11-23
中国交通信息化(2019年1期)2019-03-26
小学科学(2019年12期)2019-01-06
电子制作(2018年19期)2018-11-14
电子制作(2018年16期)2018-09-26
