基于故障树分析和贝叶斯网络方法的液压举升机构故障诊断
2021-09-14 06:24:38邹树梁陈树强
南华大学学报(自然科学版) 2021年4期
邹树梁,陈树强
(1.南华大学 资源环境与安全工程学院,湖南 衡阳 421001;2.核设施应急安全技术与装备湖南省重点实验室,湖南 衡阳 421001)
0 引 言
我国核设施退役过程中有许多的试剂输送管道、管线需要拆除,由于管道离地面1~6 m左右,拆除工作有不小的难度。以往采用较多的拆除方法是工作人员手提着剪切机或着液压锯,在搭设好的脚手架上对管道进行拆解。由于管道高度不一致,脚手架搭设高度不一致,工人的工作量大,而且危险系数也比较高了[1-2]。
为了降低危险系数,提升劳动效率,在现有移动式升降机基础上,谢昌霖设计出一种全方位多自由度移动的升降式平台做为基础平台,搭载拆除设备实施管道拆除工作[3]。移动式升降平台在本体工作时,主要要实现两种动作。1)移动式升降平台行走与转向动作:行走机构驱动采用电动马达驱动,电动马达直接安装在驱动轮上,依靠麦克纳姆轮可以横向运动的特性,从而驱动平台实现纵向行走及横向行走;2)举升动作:液压油缸举升工作时,带动剪叉臂架伸展,伸展的臂架通过滚轮推动平台向上运动。移动式升降平台在台面工作时,主要实现两种动作。1)工作台面的横移、纵移及旋转运动:工作台面的旋转运行由带步进电机的中空旋转平台控制,其横移、纵移由电动滚珠丝杠螺母副组成的十字滑台实现;2)废料管的回收装置运动:废料管收集容器安装于工作台面底部伸缩臂的一端,通过液压油缸的伸缩控制其运动。
液压举升机构作为移动式升降平台的主要动力构件,一旦发生故障,将造成巨大损失。因此快速确定故障原因与故障点,对保证设备安全运行具有重大意义。许多学者在液压传动系统故障诊断方面做了大量研究,吴勇[4]等基于T-S模型的动态故障树分析装载机液压系统;周佳[5]等利用故障树分析了大轮拖液压不提升的故障;汤良[6]等利用双因果键合图法进行液压系统故障诊断;莫明慧[7]的基于ACA-BP算法进行挖掘机液压系统故障诊断方法,通过诊断故障的仿真实例,验证了ACA-BP算法的有效性;邓丰曼[8]等构建模糊ARX模型诊断液压制动系统运行故障,通过RBQ网络分类器归类故障的特征向量,实现对系统故障种类与状态的判断。
1 可靠性分析方法
1.1 故障树和贝叶斯网络
故障树分析方法(fault tree analysis,FTA)和贝叶斯网络方法(Bayesian network,BN)是大家用的比较多的可靠性分析方法。FTA是一种图形推理法,主要是通过分析系统,将其中最不希望发生的事作为一个顶上事件,然后开始逐级分析寻找最不希望发生事件的原因,直至找到最根本原因,作为底事件,用树形倒置图描述其逻辑关系。故障树定性分析的目的是指找出故障树中顶事件发生的所有故障形式,采用较多的是下行法和上行法求最小割集,定量分析是在定性分析的基础上求失效概率、重要度等结果。BN一般用来处理复杂问题的不确定性比较好,贝叶斯网络又称信度网,最开始是用于人工智能的不确定性问题的研究,是概率性和图示不确定性的一种表达和推理的模型。
通过对系统进行快速故障分析,建立故障树模型,并将建立的故障树模型转换为贝叶斯网络模型。通过构建故障树然后直接转换贝叶斯网络,可以在早期消除贝叶斯网络建模的复杂过程。此外,贝叶斯网络双向推理功能可以弥补复杂系统中故障树应用程序的缺点。
1.2 故障树向贝叶斯网络的转换
FTA与BN两个方法各有特色,对各自系统状态描述却又有相似之处,所以贝叶斯的网络节点与故障树的事件可以一一对应,并且在推理机制上两者也具有极大的相似性,因此故障树可以直接向贝叶斯网络转换[9]。首先通过系统故障分析,先找出系统故障最主要的事件,然后找到事件发生的原因,直至最根本的原因做其底事件,它们之间的关系用逻辑门连接起来,就可以构建故障树。故障树的基本事件与贝叶斯网络中的根节点分别对应,用带箭头的线连接 。贝叶斯网络中的先验概率就对应于故障树中底事件的失效概率。
2 基于故障树建立贝叶斯网络模型2.1 系统分析和故障树
液压举升机构结构多变,工作环境复杂,所以故障出现的种类原因也较多,通过对其常见的故障进行分析归纳,列出了故障树,如图1所示。其中,编号跟各自对应的故障事件如表1所示。
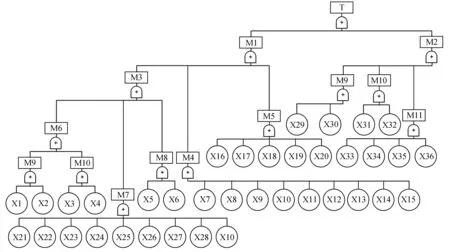
图1 液压举升机构故障树Fig.1 Fault tree of Hydraulic lifting mechanism
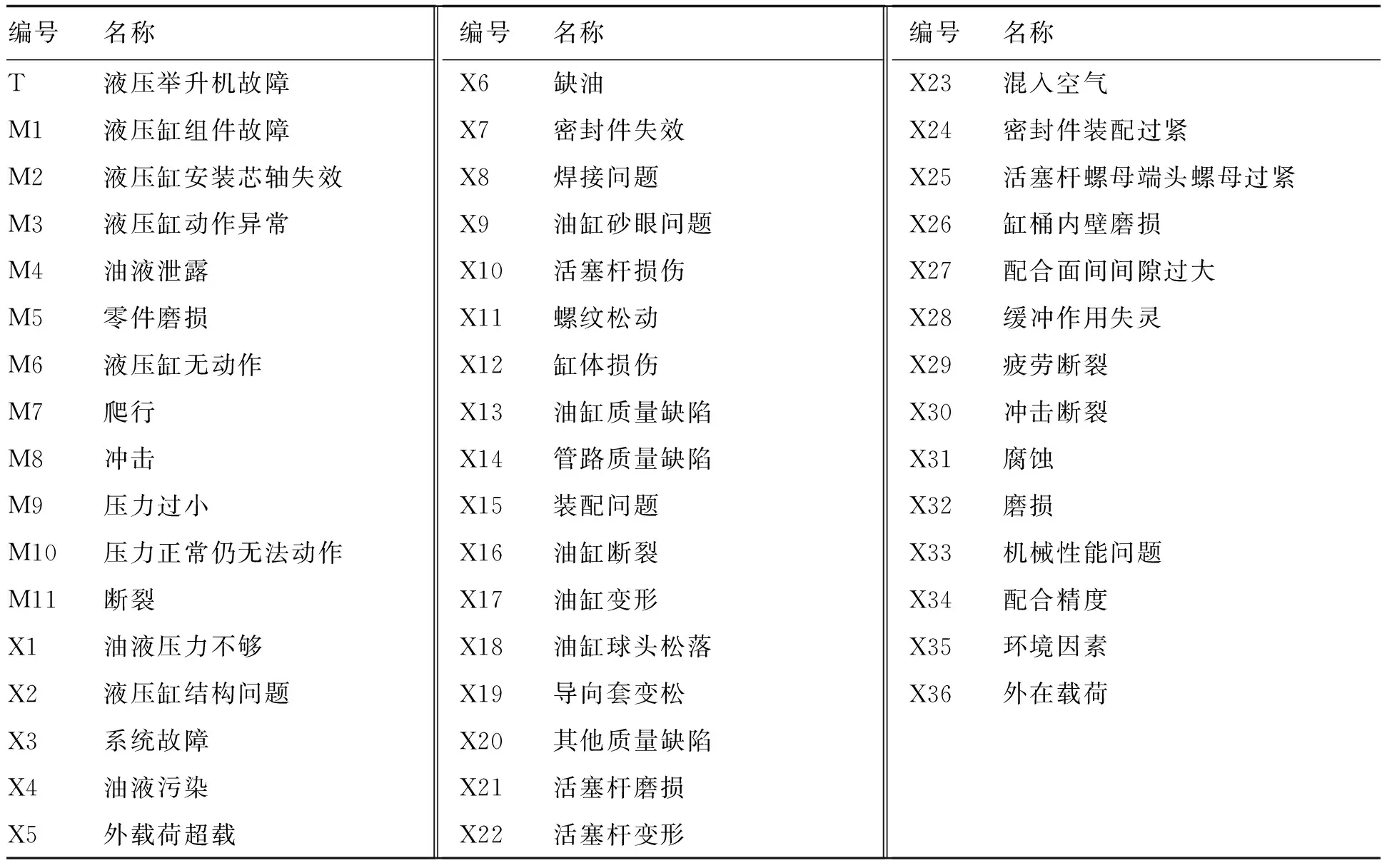
表1 举升机构故障事件Table 1 Lifting mechanism failure event
在液压举升机构故障树中,受环境因素及一些原因的影响,底事件发生概率具有模糊性,采用模糊数能较好的表示液压举升机构底事件发生概率。本文选取三角模糊函数[10-11]。
三角模糊函数隶属度函数
底事件Xi(i=1,2,…,n,n为底事件树)发生的概率
PXi=(m-a,m,m+b)
(2)
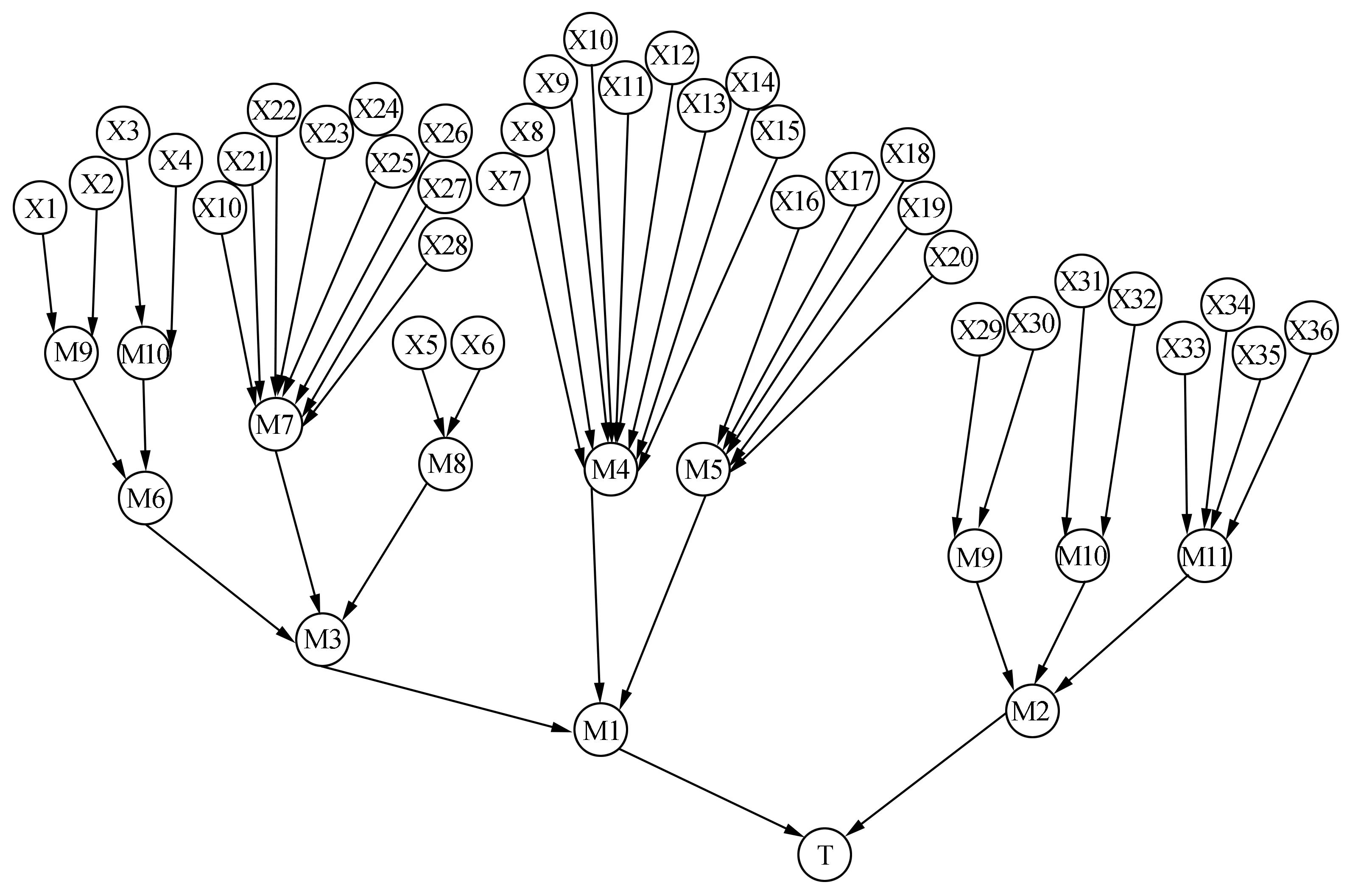
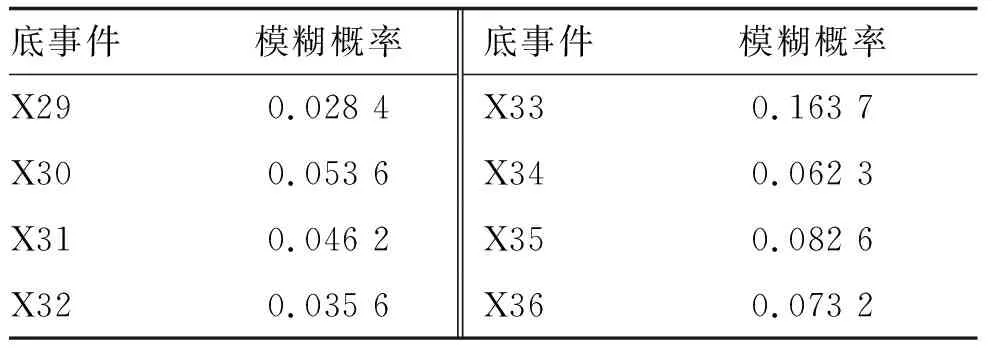
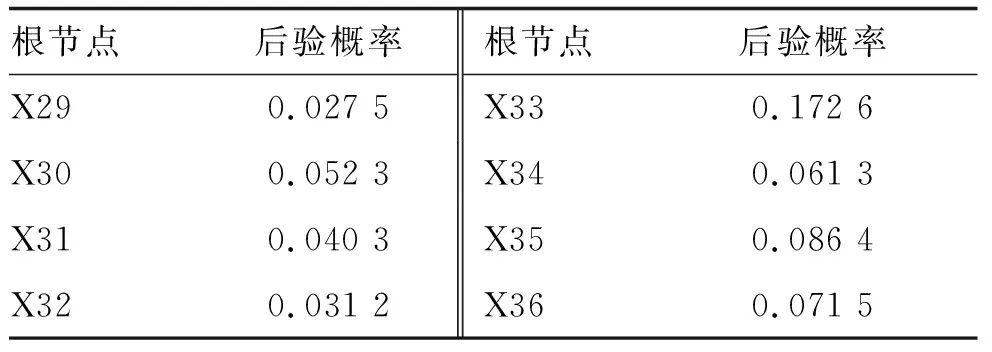
式中:a,b为PXi的置信上下限;m为中值,0 根据液压举升机构中仅使用了逻辑门或门,则引入或门模糊算法,得底事件模糊概率: 按照将故障树转换为贝叶斯网络的方法,对举升机构故障树进行转换[12],得到如图2所示的贝叶斯网络模型。 图2 液压举升机故障贝叶斯网络Fig.2 Bayesian network of hydraulic lift failure 贝叶斯网络分析过程是首先获得叶节点概率,然后通过叶节点概率求出根节点概率。 但是,仅依靠根节点的后验概率来指导故障事件是不可靠的。根节点概率的重要性可能反映叶节点的故障率,而根节点的概率重要度则反映了液压举升机构的薄弱环节。因此,有必要综合考虑后验概率和概率重要度,以了解引起举升机构故障的主要事件[13]。 液压举升机构贝叶斯网络中叶节点为T,根节点为X1-X36,且X1∪X2∪…∪X36=φ,则叶节点T发生的情况下根节点Xi发生的概率为 式中:P(Xi)为根节点Xi的先验概率;P(T|Xi)为根节点Xi发生的情况下叶节点T发生的概率。根节点Xi状态为S1(根节点故障时S1为1,无故障时S1为0)的概率为 式中Pa(Xi)为根节点Xi的条件概率。 叶节点T状态为S2(叶节点发生时S2为1,不发生S2为0)的概率为 根节点Xi状态为S1时,叶节点T状态为S2的概率为 根节点Xi状态为S1时单独引起叶节点T状态为S2的概率重要度为 根节点Xi对应叶节点T状态为S2的概率重要度为 液压举升机构系统故障诊断的重点是液压系统。本研究主要从液压缸组件故障和液压缸安装心轴失效故障两个方面考虑,由于篇幅所限,此处仅计算液压缸安装心轴失效故障数据。查阅移动式升降平台研发阶段运行情况及故障检修记录,综合相关参考资料,结合专家及技术人员的意见,得到底事件发生概率中值m和置信上下限a,b估计值(按移动式升降平台连续工作400h计算),如表2所示。 表2 底事件发生概率中值及置信区间Table 2 Median Probability and Confidence Interval of Bottom Event 将表2数据代入式(3)得到液压举升机构各底事件模糊概率,如表3所示。 表3 底事件模糊概率Table 3 Fuzzy probability of bottom event 将表3中的底事件模糊概率作为先验概率,利用贝叶斯双向推理能力对先验概率进行修正,利用式(4)求得后验概率,如表4所示。将液压举升机构故障树中的或门逻辑关系转换为贝叶斯根节点条件概率,根据式(6)可得液压缸安装心轴失效故障发生概率约为0.359。 表4 根节点后验概率Table 4 Posterior probability of root node 根据式(7)~式(9)可求得各根节点在液压举升机构液压缸安装心轴故障时的概率重要度,如表5所示。 表5 根节点概率重要度Table 5 Root node probability importance 综合考虑根节点的后验概率以及概率重要度,可以看出X33,X34,X35,X36这四个事件对液压缸安装心轴失效的影响较大。机械性能较弱、外在载荷过大易造成液压缸安装心轴断裂,配合精度误差、工作环境复杂将造成液压缸安装心轴磨损腐蚀失效。因此,当故障发生时可以优先排查这四个事件,再依次逐级排查其他事件,将缩短故障诊断时间。并且可以提前在这几个事件方面做好预防,提升机构可靠性。 1)故障树模型与贝叶斯网络模型具有相通性,因此故障树可以直接转换为贝叶斯网络。并且利用贝叶斯网络模型的双向推理能力,相比于独自使用故障树或贝叶斯网络,将具有更便捷的建模分析能力,计算也更精确更高效。 2)引入模糊故障树,利用模糊故障树计算底事件的模糊数和模糊概率。将模糊概率用在故障树转换的贝叶斯网络中做先验概率,从而求得叶节点发生概率,进而计算出根节点后验概率及概率重要度,可较快进行故障诊断。 3)本文暂时只考虑了两种状态,即系统的正常与故障,而运用FTA和BN结合的方法可以进行系统的多状态可靠性分析,考虑更多的故障状态,可靠性分析的结果则更加精确。2.2 贝叶斯网络模型
3 实例计算


4 结 论
猜你喜欢
冶金设备(2020年2期)2020-12-28 00:15:26
湖北农机化(2020年17期)2020-11-02 07:46:54
重型机械(2020年2期)2020-07-24 08:16:20
数理化解题研究(2017年4期)2017-05-04 04:07:54
临床超声医学杂志(2017年3期)2017-04-08 07:13:28
铁道通信信号(2016年6期)2016-06-01 12:10:20
电子器件(2015年5期)2015-12-29 08:43:15
石油化工建设(2015年6期)2015-12-01 04:17:35
郑州大学学报(理学版)(2014年2期)2014-03-01 04:20:49
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:13